地球唯一の衛星“月”は、太陽系全体を見渡しても5番目に大きな衛星で、周回している惑星との直径比・質量比は太陽系で最大になります。
月と同程度の大きさの他の衛星は、地球よりずっと大きな惑星を周回していることを考えると、月は特別な存在と言えます。
その月は内部が冷えることで徐々に収縮しているんですねー
月の表面は固くもろい岩石でできているので、収縮によって表面には断層や崖が形成されています。
今回の研究では、月の南極地域の地形から、月の表面を覆うレゴリスの斜面における崩れやすさを推定。
過去に南極地域で発生したことが考えられるマグニチード5.3の月固有の地震“月震”の影響を調べています。(※1)
注目すべきことに、特定された断層帯や地すべり発生のリスクが高い位置は、アメリカ合衆国政府が出資する有人月探査計画“アルテミス”の着陸候補地の近くにあること。
月の南極地域は月探査計画で注目されている場所の一つなだけに、今回の研究結果は将来的な探査計画では月震や地すべりのリスクを考慮しなければならないことを示唆しているようです。
科学的調査や有人探査計画で注目されている地域
月は、地球唯一の衛星で、恒久的に地球の近くに存在する天体なので、宇宙開発の初期から現在に至るまで探査対象として注目されてきた天体です。
特に近年の月探査計画で多くなってきたのは、月の科学的調査をより重点的に行うものや、将来的に恒久的な有人月面基地を建設するための訓練や準備を兼ねたもの。
特に月の南極地域は、科学的調査でも有人探査計画でも注目されている場所です。
月は自転軸の傾きがとても小さいので、月の極域にあるクレーターの内部には、太陽の光が決して届くことのない領域が生じています。
これを永久影といい、温度は最高でもマイナス157度ほどにしかなりません。
そこに彗星や小惑星が落下するなどして水がもたらされれば、氷の状態で保存される訳です。
そう、真空の月面で蒸発しやすい水などの揮発性物質が豊富に残っている可能性があるんですねー
このことが意味するのは、将来の有人月面基地において、生活に必要な水や、農業に必要な水を現地で確保できるだけでなく、水は電気分解をすれば呼吸用の酸素やロケットエンジン用の推進剤も供給できるというメリットがあることです。
さらに、月の表面で蒸発して消えやすい物質が残っている“化石”という点で、科学的にも重要なものと言えます。
また、南極地域には金属資源が豊富に存在すると考えられているので、この点でも月面基地建設や科学的調査で有利な場所といえます。
この南極地域には、2023年8月23日にインド宇宙研究機関(ISRO)の月探査機“チャンドラヤーン3号”が、史上初の着陸に成功しています。
また、アメリカ合衆国で連邦政府が出資している有人月探査計画“アルテミス計画”は、史上初となる有人での南極地域への着陸と探査を予定しています。
月固有の地震“月震”
一方で、あまり良く分かっていないのが、月面に着陸した無人探査機や有人月面基地が、将来どのようなリスクにさらされるのかということです。
地球では、分厚い大気による気象現象や、プレートテクトニクスによる火山・地震活動が常に起こっています。
それとは異なり、月はほぼ真空で地質学的にも“死んだ天体”だとみなされ、短期的なリスクはほとんど無いものと考えられています。
でも、実際には地球ほど激しくはないものの、月にも固有の地震“月震”が存在しています。
その原因には、地球の重力が生み出す潮汐力の影響や天体衝突のような外的要因もありますが、月の構造変化による内的要因もあります。
特に発生原因として挙げられるのは、月そのものの縮小です。
月は誕生してから膨張を続け、約38億年前にピークに達し、その後に収縮に向かったことが明らかにされています(半径変化史)。
これは、月の内部が少しずつ冷えていくことが原因で、過去数億年で直径が15メートルほど小さくなったと考えられます。
この収縮による影響は、表面に多数の断層や崖として現れることになります。
その大きさは最大で高低差150メートル、長さ数十キロにもなり、断層がズレると地球の地震と同じ月震の原因となります。
アポロ計画で設置された月震計は、表面の断層のズレによって生じたと思われるいくつかの月震を記録しています。
ただ、月震計の少なさに加えて観測期間が1969年~1977年と限られていたことがなどが理由で、総合的なにデータが不足しているので、どこで発生しているかなど月震の正確な状況は良く分かっていませんでした。
アポロ計画で記録された月震
研究チームでは、過去(2019年)にも、月の南極付近にある断層地形とアポロ計画で記録された月震の関連を調べていました。
月表面の非常に高精細な画像は、NASAの月探査機“ルナー・リコネサンス・オービター”によって得られています。
また、アポロ計画で1973年3月13日に記録されたマグニチュード5程度の月震“N9事象(N9 event)”は、南極地域で発生したことが1979年に推定されていました。
でも、データの性質からその精度には限界があり、推定された震源域はかなり広いものでした。
そして、最も可能性の高いポイントには、月震の規模に対してかなり小さい断層崖しかありませんでした。
当初研究チームでは、南極地域にある“ド・ジェラルーシ葉状衝上断層崖(de Gerlache lobate thrust fault scarp)”に、N9事象の原因となった活断層が含まれていると考えていました。
これは、1979年に推定された断層崖よりも、ずっと規模が大きなものでした。
研究チームでは、複数の震源が推定されてしまうものの一つ一つのポイントにおいては、精度が高くなるアルゴリズムを使って震源を推定。
すると、震源が“ド・ジェラルーシ葉状衝上断層崖”に強く関連づいていることが示されました。
大きな月震はかなり頻繁に起きている
今回の研究でチームが考えているのは、月の表面を覆うレゴリスが大規模な月震で崩れる可能性です。
レゴリスは微小隕石や太陽風によって細かく砕かれた鋭い形状の砂状物質。
お互いの結合力が弱いので、レゴリスに覆われた月の表面はとても崩れやすいものとなっています。
研究では、N9事象の規模をマグニチュード5.3と仮定。
月の表面地形や斜面の角度、レゴリスの結合力を元に、N9事象と同じ月震が起きた際の揺れと地すべりの評価を行っています。
その結果分かったのは、震源からの距離が40キロ以内では強い揺れに襲われること、一方50キロを超える場所でも中程度から弱い揺れに襲われることでした。
そして、そのような弱い揺れであっても、レゴリスで覆われた斜面は容易に地すべりを起こすことも分かりました。
このことは、南極地域を調査する将来定期な探査計画において懸念事項となるかもしれません。
例えば、アルテミス計画の着陸候補地は、今回推定された震源域や崩れやすい斜面に対して近い距離にあります。
また、地球の地震の揺れの持続時間は長くても数分ですが、月の表面で起こる月震の揺れは数時間を超えて続くことが珍しくありません。
さらに、永久影のように科学調査や資源採掘が予定される場所は、地すべりを起こしやすい斜面に位置しています。
マグニチュード5程度という規模の大きさ、長時間にわたる月震の揺れの長さ、そして地すべり発生の恐れは、長時間または恒久的に月面に滞在する人々や機材にとってリスクとなり得ます。
ド・ジェラルーシ葉状衝上断層崖と似たような断層崖や地形は、月面のあちこちに存在しています。
また、短期間に月震が複数記録されたことや、断層崖の地形的な新しさは、大きな月震がかなり頻繁に起きていることを示しています。
長期間の運用が計画される将来的な月探査計画では、地震や地すべりが計画を妨げる負の事象として、検討されるようになるかもしれませんね。
こちらの記事もどうぞ
月と同程度の大きさの他の衛星は、地球よりずっと大きな惑星を周回していることを考えると、月は特別な存在と言えます。
その月は内部が冷えることで徐々に収縮しているんですねー
月の表面は固くもろい岩石でできているので、収縮によって表面には断層や崖が形成されています。
今回の研究では、月の南極地域の地形から、月の表面を覆うレゴリスの斜面における崩れやすさを推定。
過去に南極地域で発生したことが考えられるマグニチード5.3の月固有の地震“月震”の影響を調べています。(※1)
※1.マグニチュードには複数の定義があり、後述するN9事象の規模は、リヒタースケールで約5、実体波マグニチュードで5.5以上と測定されている。ここでは、揺れの強さを推定したときに使用したモーメントマグニチュード5.3を代表値としている。
その結果分かってきたのは、中程度から弱い揺れが震源から50キロを超える距離まで到達し、そのような弱い揺れでも容易に地すべりが発生する恐れがあることでした。注目すべきことに、特定された断層帯や地すべり発生のリスクが高い位置は、アメリカ合衆国政府が出資する有人月探査計画“アルテミス”の着陸候補地の近くにあること。
月の南極地域は月探査計画で注目されている場所の一つなだけに、今回の研究結果は将来的な探査計画では月震や地すべりのリスクを考慮しなければならないことを示唆しているようです。
この研究は、スミソニアン博物館のThomas R. Wattersさんたちの研究チームが進めています。
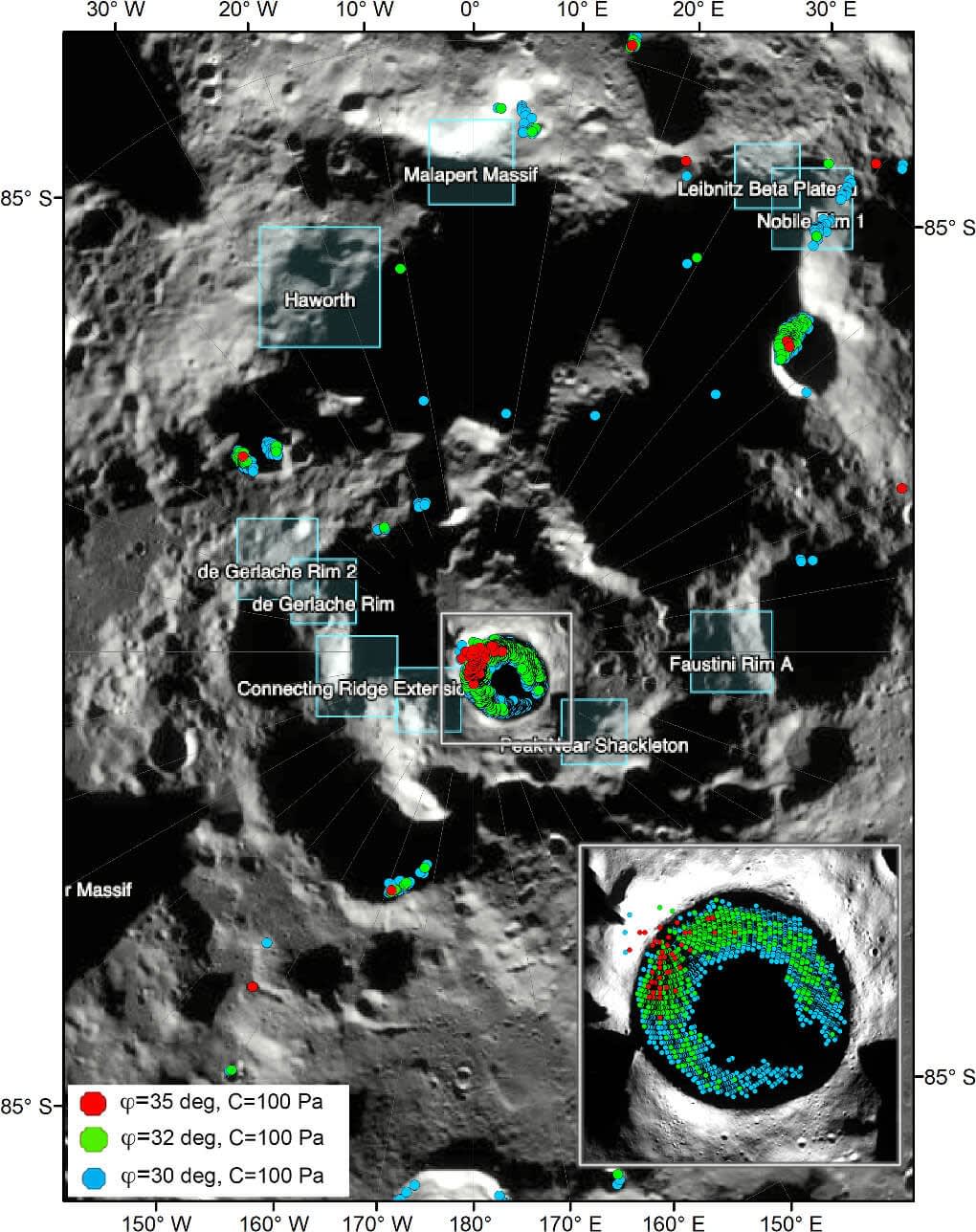 |
| 図1.今回の研究で推定された、いくつかの斜面の地すべりのリスク(赤・緑・青の丸点)。赤い点であるほど斜面の角度(内部摩擦角)が高く、月震の際に崩れやすいことを示している。水色の四角はアルテミス計画での着陸候補地。(Credit: Thomas R. Watters, et al.) |
科学的調査や有人探査計画で注目されている地域
月は、地球唯一の衛星で、恒久的に地球の近くに存在する天体なので、宇宙開発の初期から現在に至るまで探査対象として注目されてきた天体です。
特に近年の月探査計画で多くなってきたのは、月の科学的調査をより重点的に行うものや、将来的に恒久的な有人月面基地を建設するための訓練や準備を兼ねたもの。
特に月の南極地域は、科学的調査でも有人探査計画でも注目されている場所です。
月は自転軸の傾きがとても小さいので、月の極域にあるクレーターの内部には、太陽の光が決して届くことのない領域が生じています。
これを永久影といい、温度は最高でもマイナス157度ほどにしかなりません。
そこに彗星や小惑星が落下するなどして水がもたらされれば、氷の状態で保存される訳です。
そう、真空の月面で蒸発しやすい水などの揮発性物質が豊富に残っている可能性があるんですねー
このことが意味するのは、将来の有人月面基地において、生活に必要な水や、農業に必要な水を現地で確保できるだけでなく、水は電気分解をすれば呼吸用の酸素やロケットエンジン用の推進剤も供給できるというメリットがあることです。
さらに、月の表面で蒸発して消えやすい物質が残っている“化石”という点で、科学的にも重要なものと言えます。
また、南極地域には金属資源が豊富に存在すると考えられているので、この点でも月面基地建設や科学的調査で有利な場所といえます。
この南極地域には、2023年8月23日にインド宇宙研究機関(ISRO)の月探査機“チャンドラヤーン3号”が、史上初の着陸に成功しています。
また、アメリカ合衆国で連邦政府が出資している有人月探査計画“アルテミス計画”は、史上初となる有人での南極地域への着陸と探査を予定しています。
月固有の地震“月震”
一方で、あまり良く分かっていないのが、月面に着陸した無人探査機や有人月面基地が、将来どのようなリスクにさらされるのかということです。
地球では、分厚い大気による気象現象や、プレートテクトニクスによる火山・地震活動が常に起こっています。
それとは異なり、月はほぼ真空で地質学的にも“死んだ天体”だとみなされ、短期的なリスクはほとんど無いものと考えられています。
でも、実際には地球ほど激しくはないものの、月にも固有の地震“月震”が存在しています。
その原因には、地球の重力が生み出す潮汐力の影響や天体衝突のような外的要因もありますが、月の構造変化による内的要因もあります。
特に発生原因として挙げられるのは、月そのものの縮小です。
月は誕生してから膨張を続け、約38億年前にピークに達し、その後に収縮に向かったことが明らかにされています(半径変化史)。
これは、月の内部が少しずつ冷えていくことが原因で、過去数億年で直径が15メートルほど小さくなったと考えられます。
この収縮による影響は、表面に多数の断層や崖として現れることになります。
その大きさは最大で高低差150メートル、長さ数十キロにもなり、断層がズレると地球の地震と同じ月震の原因となります。
アポロ計画で設置された月震計は、表面の断層のズレによって生じたと思われるいくつかの月震を記録しています。
ただ、月震計の少なさに加えて観測期間が1969年~1977年と限られていたことがなどが理由で、総合的なにデータが不足しているので、どこで発生しているかなど月震の正確な状況は良く分かっていませんでした。
アポロ計画で記録された月震
研究チームでは、過去(2019年)にも、月の南極付近にある断層地形とアポロ計画で記録された月震の関連を調べていました。
月表面の非常に高精細な画像は、NASAの月探査機“ルナー・リコネサンス・オービター”によって得られています。
また、アポロ計画で1973年3月13日に記録されたマグニチュード5程度の月震“N9事象(N9 event)”は、南極地域で発生したことが1979年に推定されていました。
でも、データの性質からその精度には限界があり、推定された震源域はかなり広いものでした。
そして、最も可能性の高いポイントには、月震の規模に対してかなり小さい断層崖しかありませんでした。
 |
| 図2.2019年の研究で示されたN9事象の推定震源地(紫に中黒の点)。青色の点は1979年に推定された最も可能性の高い震源地(実際にはもっと広い領域が推定されている)。水色の四角はアルテミス計画での着陸候補地。(Credit: Thomas R. Watters, et al.) |
これは、1979年に推定された断層崖よりも、ずっと規模が大きなものでした。
研究チームでは、複数の震源が推定されてしまうものの一つ一つのポイントにおいては、精度が高くなるアルゴリズムを使って震源を推定。
すると、震源が“ド・ジェラルーシ葉状衝上断層崖”に強く関連づいていることが示されました。
大きな月震はかなり頻繁に起きている
今回の研究でチームが考えているのは、月の表面を覆うレゴリスが大規模な月震で崩れる可能性です。
レゴリスは微小隕石や太陽風によって細かく砕かれた鋭い形状の砂状物質。
お互いの結合力が弱いので、レゴリスに覆われた月の表面はとても崩れやすいものとなっています。
 |
| 図3.今回の計画で推定されたマグニチュード5.3の月震による揺れの強さの推定値。震源から50キロを超える距離でも、中程度から弱い揺れがあると推定される。(Credit: Thomas R. Watters, et al.) |
月の表面地形や斜面の角度、レゴリスの結合力を元に、N9事象と同じ月震が起きた際の揺れと地すべりの評価を行っています。
その結果分かったのは、震源からの距離が40キロ以内では強い揺れに襲われること、一方50キロを超える場所でも中程度から弱い揺れに襲われることでした。
そして、そのような弱い揺れであっても、レゴリスで覆われた斜面は容易に地すべりを起こすことも分かりました。
このことは、南極地域を調査する将来定期な探査計画において懸念事項となるかもしれません。
例えば、アルテミス計画の着陸候補地は、今回推定された震源域や崩れやすい斜面に対して近い距離にあります。
また、地球の地震の揺れの持続時間は長くても数分ですが、月の表面で起こる月震の揺れは数時間を超えて続くことが珍しくありません。
さらに、永久影のように科学調査や資源採掘が予定される場所は、地すべりを起こしやすい斜面に位置しています。
マグニチュード5程度という規模の大きさ、長時間にわたる月震の揺れの長さ、そして地すべり発生の恐れは、長時間または恒久的に月面に滞在する人々や機材にとってリスクとなり得ます。
ド・ジェラルーシ葉状衝上断層崖と似たような断層崖や地形は、月面のあちこちに存在しています。
また、短期間に月震が複数記録されたことや、断層崖の地形的な新しさは、大きな月震がかなり頻繁に起きていることを示しています。
長期間の運用が計画される将来的な月探査計画では、地震や地すべりが計画を妨げる負の事象として、検討されるようになるかもしれませんね。
こちらの記事もどうぞ