みなさんこんばんは。
実はワタクシ、個人的に大変なことになってしまいました。
このコロナ騒動で世界的に景気後退局面がニュースなどでお聞きになっていると思いますが、
その影響が突然、ワタシにも降りかかってきたということなんですよね。
具体的に言えば、9月1日からワタシは無職の専業主夫となってしまうこととなりました。
理由は上記の通り、世界的な景気後退と、日本での新たなビジネスチャンスが見られないと判断した、
ワタシの会社の北米本社が、ワタシの所属する日本のチームを丸ごとcloseすることになったためです。
上記はワタシを含めてチームメンバー3名が、7月28日に設定された緊急会議で受けた、僅か15分の説明内容でした。
ワタシを含めてチームメンバー3名は、家族のために大急ぎで次の転職先を探しているところですが、
今の景気状況からすると非常に厳しい状況と言わざるを得ないですね。
この件についてのみ、ここをご覧のみなさまは決してSNSやここのコメント欄等に関連コメントはお控えください。
ワタシの会社は北米本社の会社ですので、若干でも不穏当な記載には告訴も辞さないとお聞きしており、
みなさまにそのようなリスクを負わせるわけにはいかないのが理由です。
尚、ワタシのメッセンジャー繋がりの方がメッセンジャーで個別にご質問されるのは大丈夫です。
そこは大丈夫と会社側にも確認が取れているからです。
そもそも、このようなリスキーな内容を書き込むのもどうかとは思いましたが、どうにもやりきれない気持ちになりましたので、
そんなこともあるんだなと読み流して戴ければ、とても助かります。
さて、本日の主題は7月のMAPタミチャレでシェイクダウンしたTA07RRが総合6位となりましたので、
ちょっとパワーソースについても触れてみたいかなと思い、ここで紹介差し上げることとしました。

こちらがレースで使用したモーターそのものとなりますね。
手持ちのモーターアナライザーで計測したのですが、ほぼほぼMAPで使われているモーターアナライザーと、
同じKV値が出ることを事前に確認しております。
MAPでのモーターKVレギュレーションはKV2600以下ですので、レギュに対してKV1000も低い値に設定しています。
これでも、レース後にモーター温度が上昇した条件で、レース後の車検で計測するとKV2580くらいまでは上がりましたので、
KV計測がレース後車検のレースでは、かなり余裕を持ったKV設定が必要という次第です。
また、このモーターの電流値は1.8Aと比較的高い値を示しており、ローター磁力が高い可能性があると思います。
要すれば、トルクがあるモーターということですね。
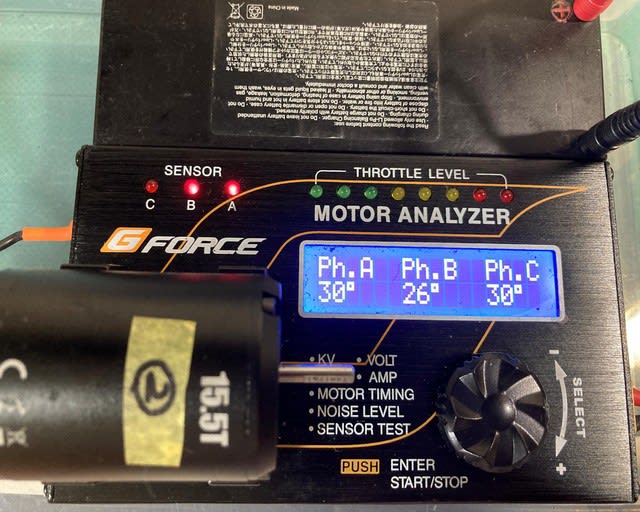
こちらはセンサー角度計測結果です。メモリでは3コマ目に設定しているのですが、実進角は平均値で29°くらいですね。
実はタミヤ製モーターのセンサー角度ばらつきはモノによってまちまちで、ひどいものはMAX-MIN差が10°を超えるものもあります。
このセンサー角度ばらつきが大きいと、モーターKV計測時の回転数ばらつきが大きくなってしまいます。
モーター計測は通常、MAX値がレギュのKV値を超えないこととなるので、センサー角度ばらつきが大きいと結果的には、
モーター進角を減らして、平均KV値を下げることでMAX値をクリアするしかなくなるんですよね。
つまりはセンサー角度ばらつき大きいモーターは遅いというワケです。
幸い、ワタシがRCスタジアム袖ヶ浦で購入したモーターは進角ばらつきが比較的小さめだったため、良いモーターだといえそうです。
残念ながら、タミヤ製モーターは改造できないので、モーターをいくつか購入して当たりを探すしかないのが事実だと思います。
あと、パワーソースというからにはバッテリーですが、ワタシはkimihiko-yano販売のブラックホーク充電器を使って、
8A充電を実施しました。尚、充電はレース走行の30分から1時間前に終了して、十分に冷えた状態で出走します。
本来はバッテリー温度が高いほうが活性化されて速いのですが、バッテリー温度が高いと電圧が上がって基準の7.2Vを超えるリスクがあり、
レース直前にバタバタしたくないので、リスクを下げるべくバッテリーでは頑張らないことにしているのが理由です。
その分、モーターのメンテは調整は細かく実施している次第です。
 | タミヤ ホップアップオプションズ No.1612 OP.1612 ブラシレスモーター 02 センサー付 15.5T 54612 主な製造国 :中国 タミヤ(TAMIYA) |
 | タミヤ バッテリー&充電器シリーズ ・LFバッテリー LF2200-6.6V レーシングパック 55102 男の子向き タミヤ(TAMIYA) |
 | ジーフォース Motor Analyzer G0107 ジーフォース(G-Force) |