2024年12月28日(土曜日) 晴れ
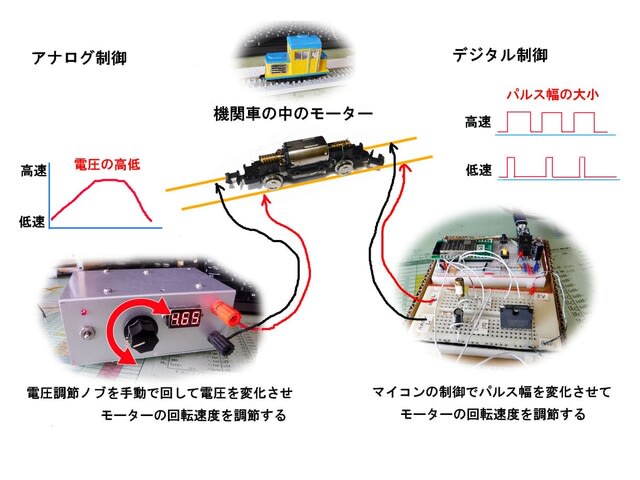
小型DCモーター(Nゲージ動力台車に組み込まれていた小さなモーター)を
アナログ電源(可変電圧電源)で回す実験をしていますが、供給する電圧は
0.5Vなのに回転し始めると徐々に回転数が上がっていき、端子電圧も上昇
していきます。
何でこんなことになるの?
DCモーターは回転中に「逆起電力」というものが発生するんだそうです。
これが影響してこんなことになるのかも???
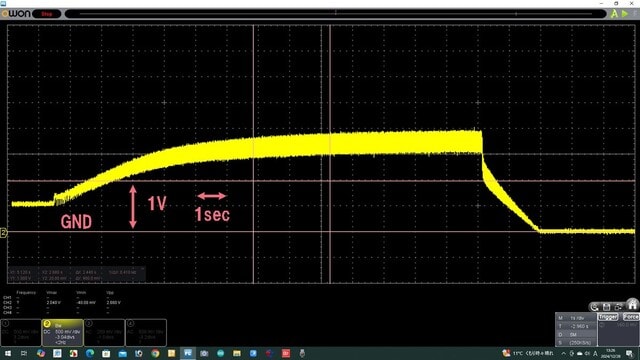
回転中のモーター端子の波形です。 こんなに波打ってます。
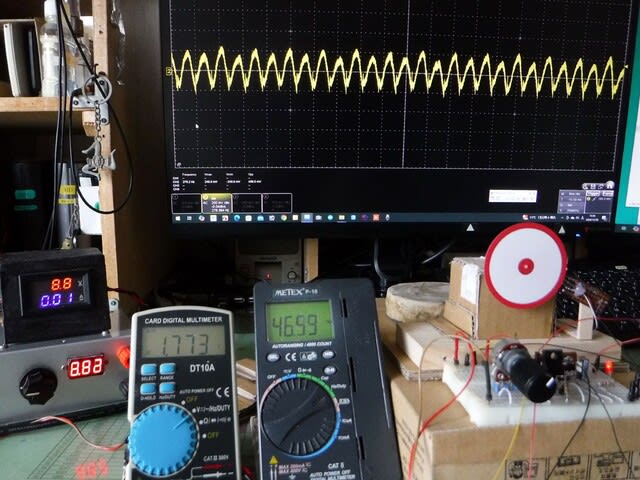
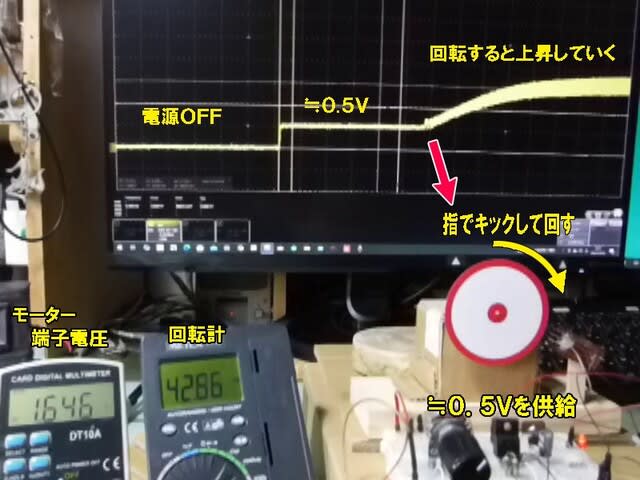
モーターに供給する電圧は≒0.5Vです。
この電圧ではモーターは回転しません。
モーター軸を指でキックしてやると回転し始め、徐々に電圧が上昇し、回転数も
上がっていきます。
電圧を調整するVRには触れていません。(電圧は≒0.5Vに設定したときのまま)
その波形をみていると段々膨らんでいくように見えます。
この膨らみは何なのだろう? ノイズが乗ってるのかな?
その様子を動画でご覧ください。
モーターの回転数が一定になったところでモーター端子電圧をOFFにして回転を
停止させました。
そのときのオシロ波形です。
画面の端から端までの掃引時間は20秒です。
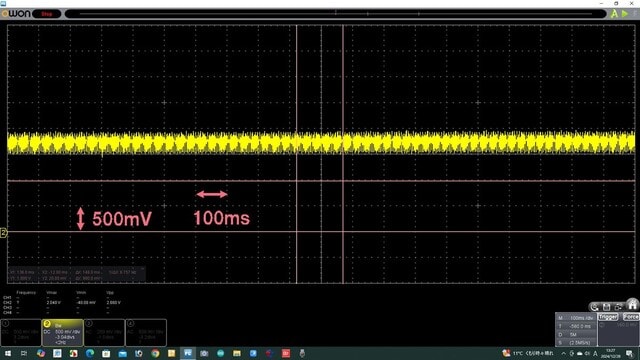
時間軸を10倍に速めてみました。
端から端までは2秒間です。
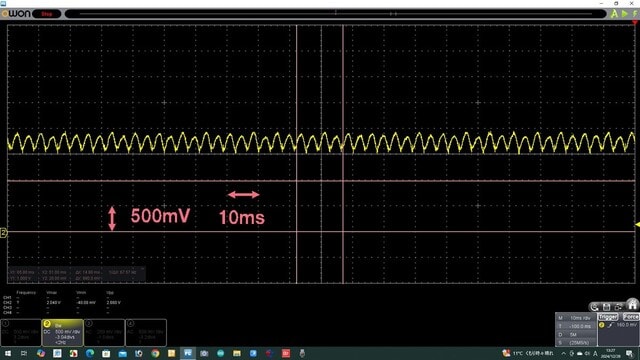
更には止めて波形を拡大しました。 画面の端から端までは0.2秒です。
(オシロの時間軸目盛は10ms)
規則的なウェーブ状の波形です。
時間軸を1ms目盛にしたときの波形です。 何だかSin波形に見えます。
周期は約3.8msです。
周期3.8msの波形の周波数は約263Hzです。(あってるかな?)
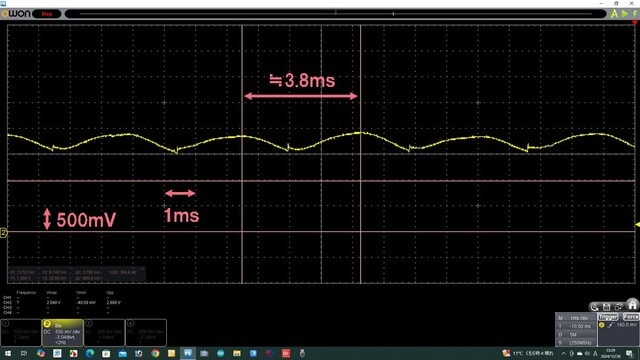
この波形は規則正しい波形に見えますからノイズではないでしょう。
モーターの回転子(電機子っていうのかな?)が回転して発生させているのでは?
モーター電機子の極数を5とすれば
263Hz÷5極 = 52.6
この波形付近のモーター回転数は44回転ぐらいです。(デジカメ動画で確認なので
正確ではない)
52.6とはそれほどの差はありませんから、電機子が回転して発生させているのでは
ないでしょうか?
モーターを回転させる入力電圧と回転に逆らう「回転数に比例する逆起電力」が
作用しあってこんな状態になるんではないか?
これがもし、パルス制御(PWM)で回転させたらどうなるんだろう???
よぅーし、アナログ電圧の実験はこの辺で終わらせてPWMの実験を始めようと
思います。 応援をよろしくお願いします。
(続く)