OnStepシステム製作記をまとめます。
< そもそもOnStepって何? >
・インテリジェントモータドライバである。
・Wi-Fi , Bluetooth を使ったワイヤレスコントロールが出来る。
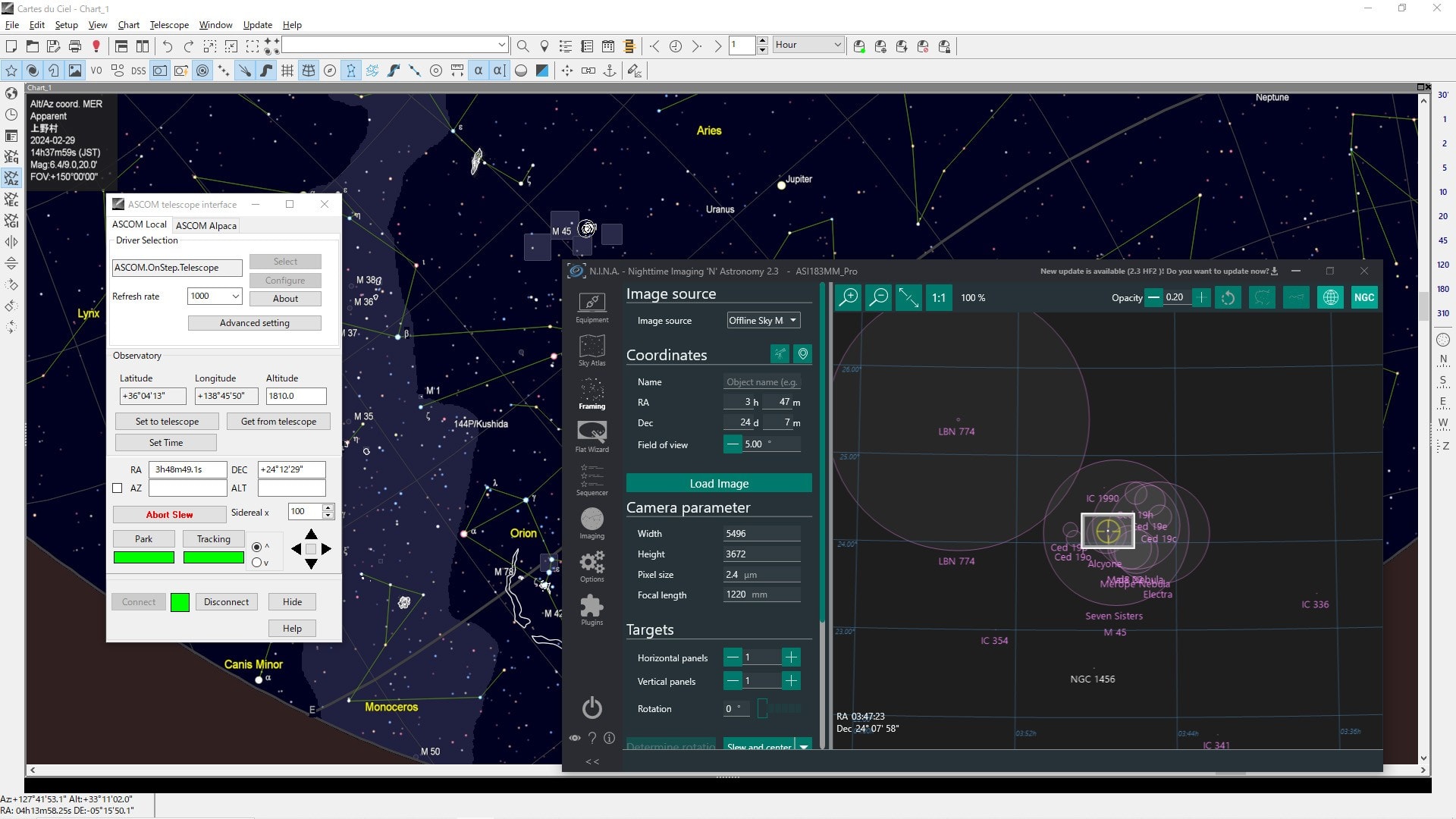
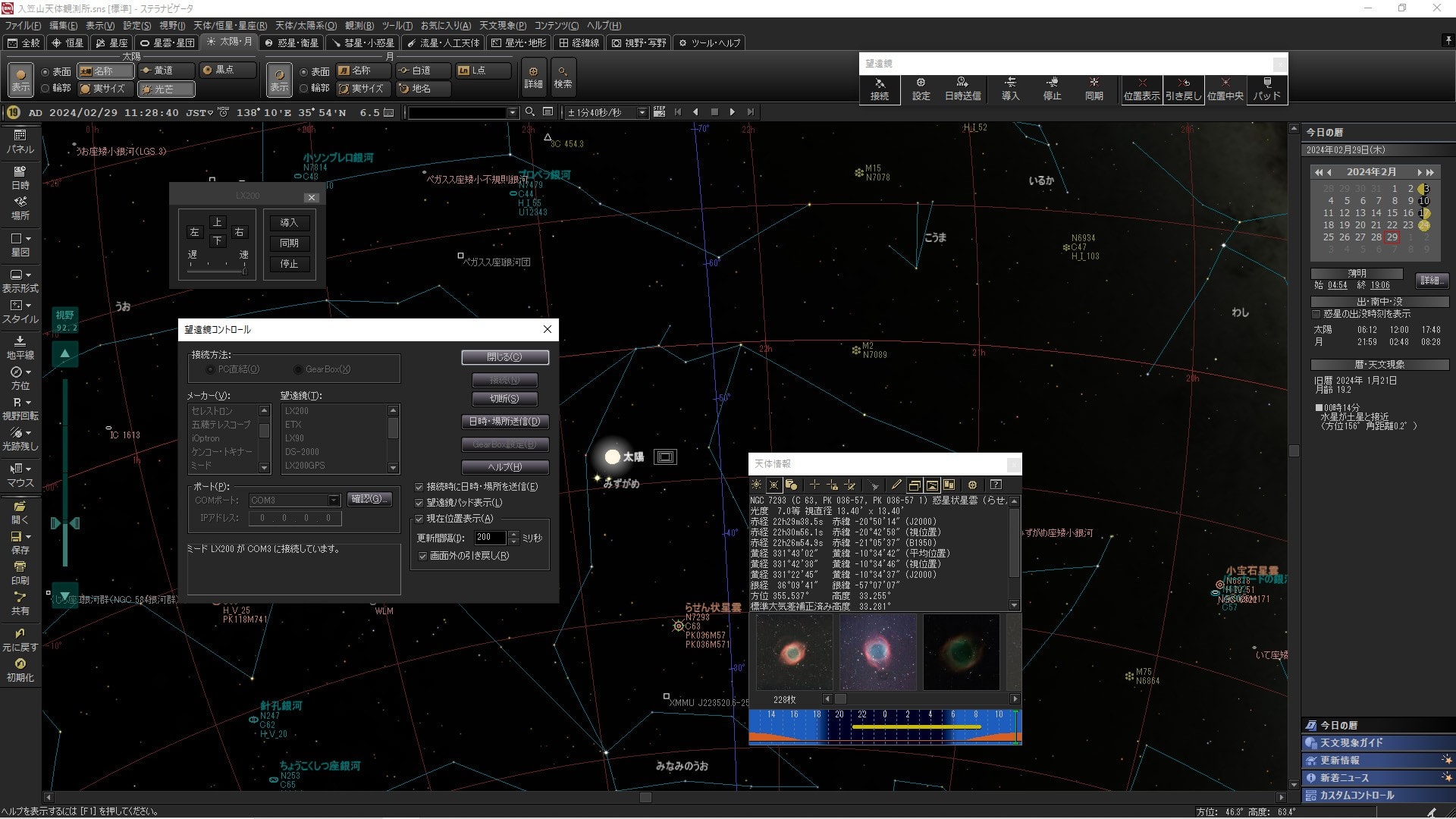
・ASCOM_driver_for_OnStepを経由してCartes-du-Ciel , SkySafariなどのプラネソフトで自動導入が出来る。
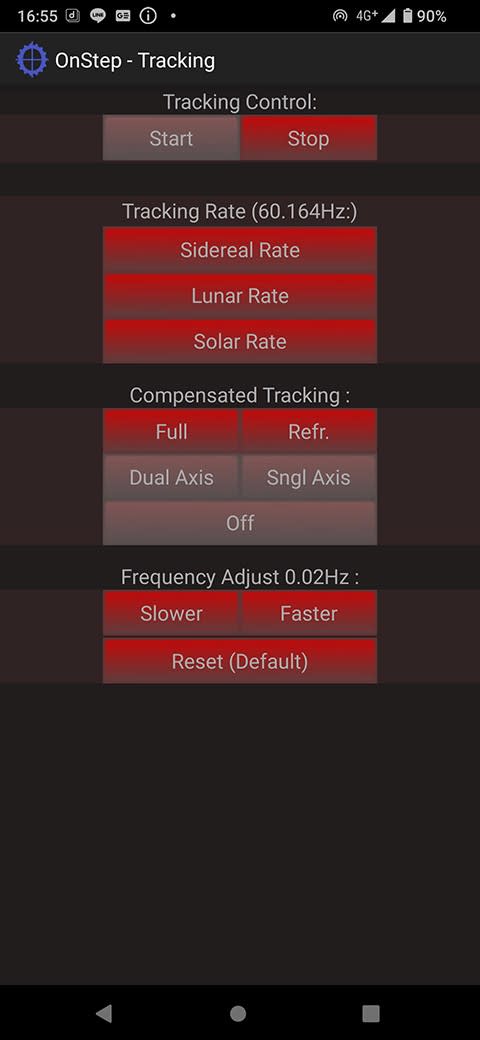
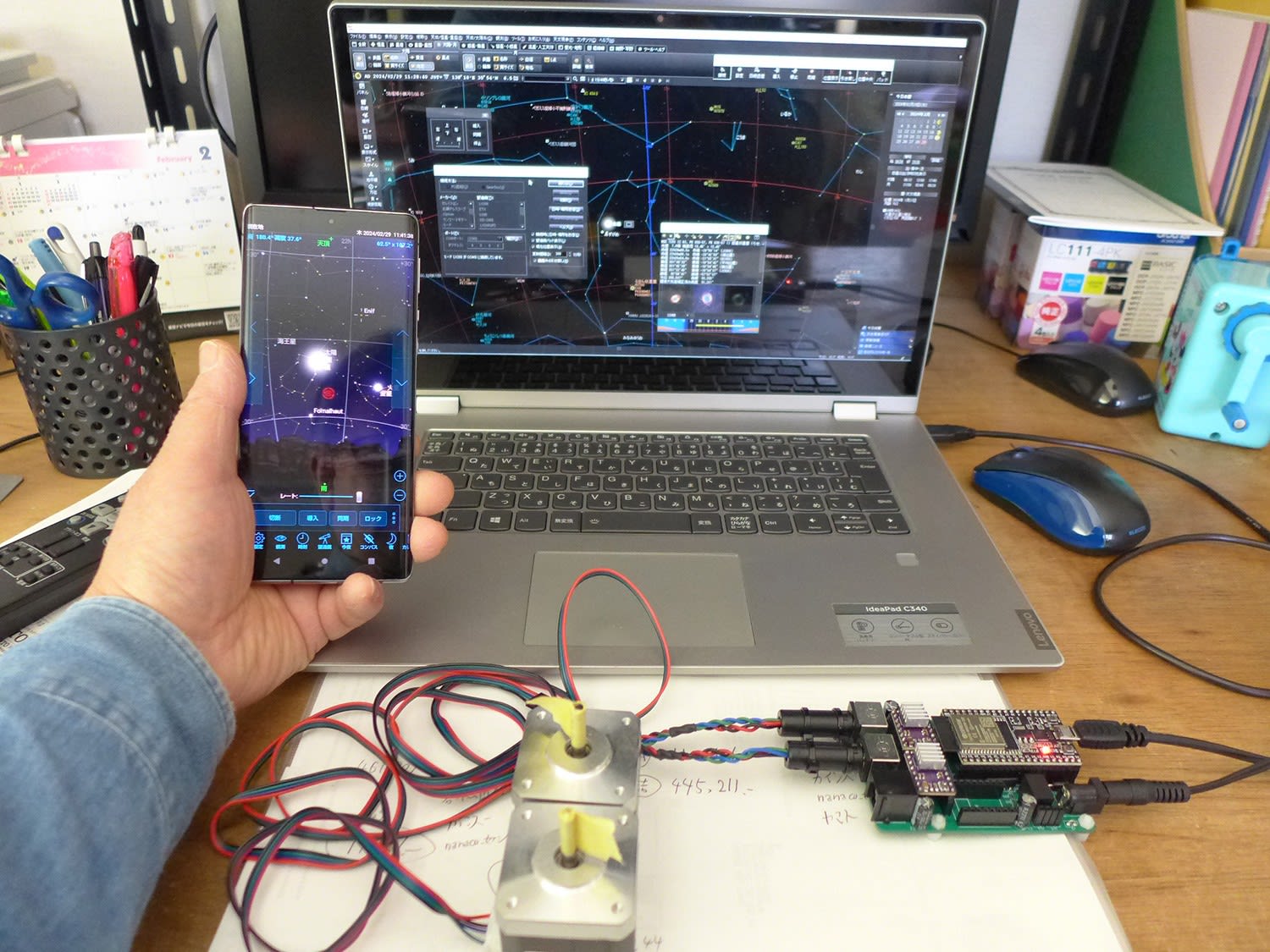
・スマホアプリのOnStep Controller2からBluetooth経由でコントロール出来る。
・手動ハンドボックスコントロールは・・・ちょっと苦手。
・カレントバージョンは release-4.24
・3Dプリンター用に安価に出回っているDRV8825マイクロステップドライバなどが使える。
・1万円程度でワイヤレスな自動導入システムを自作できる。
・ドイツ型赤道儀、フォーク型赤道儀、経緯台(ドブソニアンなど)に対応している模様。
< どうやって作る? >
・日本では偉大なるノッポとプリンのサイト運営者である ” のりきゅう ” さんがオリジナル基板を
配布している。
オリジナル OnStep基板 Rev3.0(ESP32)-偉大なるノッポとプリン (norikyu.blogspot.com)
・OnStepオフィシャル
New Stellar Journey website – Stellar Journey
・OnStep Group Wiki
main@onstep.groups.io | Wiki
・ソースコードはココ
GitHub - hjd1964/OnStep: Arduino telescope goto for equatorial and alt/az mounts
< 製作に必要なスキルは? >
・正確なハンダ付け電子工作
・回路図の読破
・電子部品のスペックシートが読めること
・Arduinoマイコン開発環境で”Lチカ”程度の制御が出来ること
・組込マイコン等の経験があればベスト
・ESP32について理解できること
・なんらかのプログラム経験があること
< OnStep_Rev3.0回路図 >・・・イロイロ書込み版
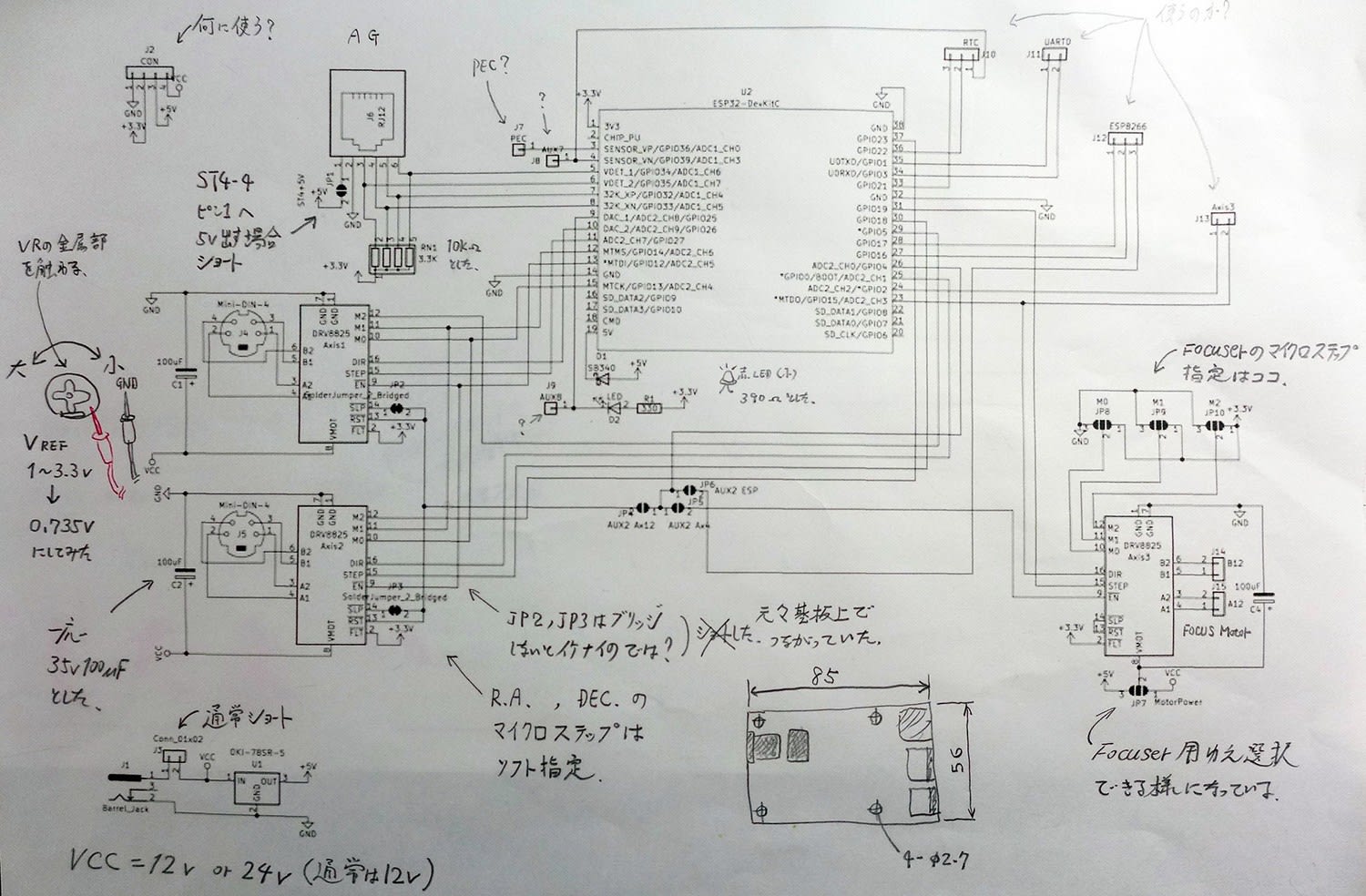
のりきゅう さんの回路図にアレコレ追記しています。
特にDRV8825ドライバ基板のVref調整方法はこんな感じでやります。
0-3.3[V]からの調整で、DRV8825の仕様では1-3.5[V]となっていますが、0.5~0.8[V]で良いと思います。
電源電圧は12[V]で十分でしょう。
DRV8825ドライバはPWM駆動なので、例えば今回使ったステッピングモータ17HS8401 ( 1.8[Ω] , 1.7[A] , 1.8°/Step)でも、
単純にオームの法則からの電流計算が出来ません。
ヒートシンクも小さいので、初めはVref=0.5[V]程度にしておいた方が良いです。
< パーツリスト >
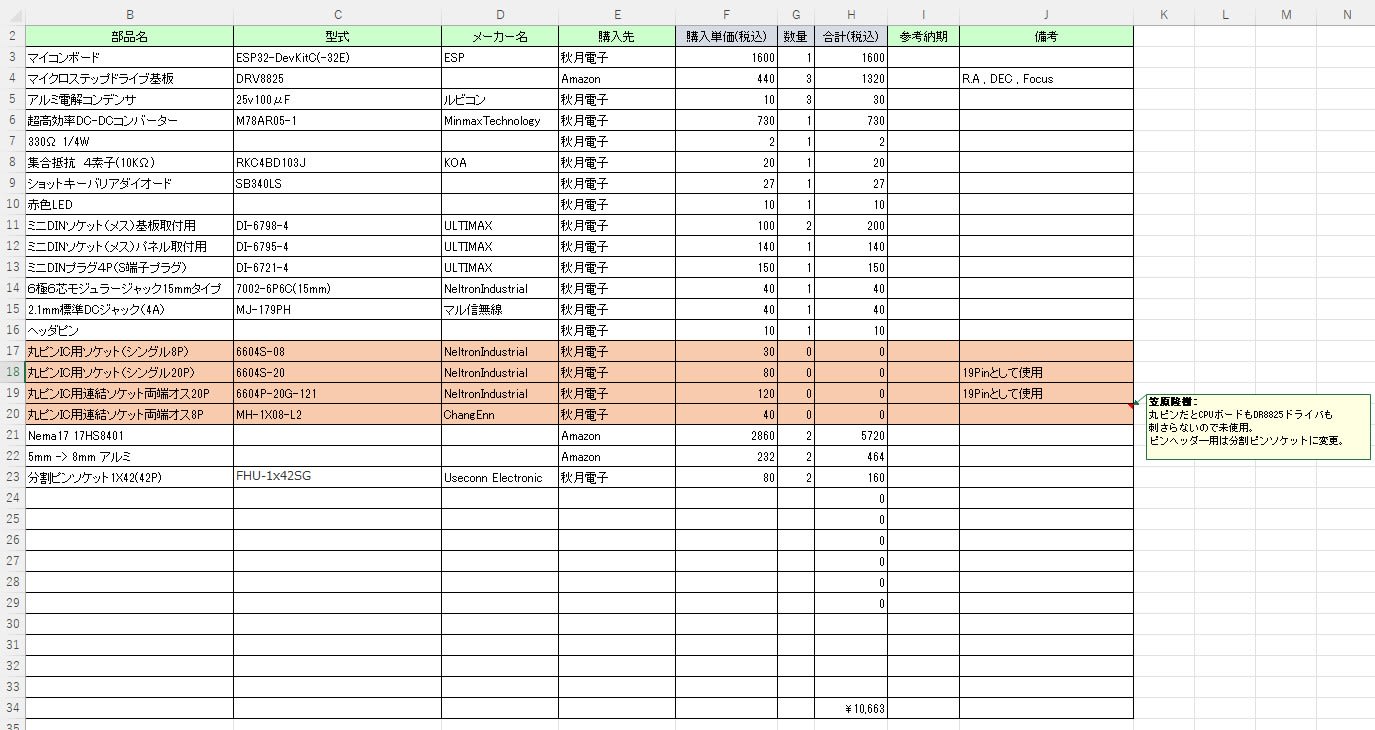
これに基板代(ほぼ手数料だけ)が加算されます。
注意点:丸ピンソケットではESP32もDRV8825も刺さりません!
23番 分割ピンソケットが使いやすいですよ。
5V電源ICはM78AR05-1を使いました。
JP2、JP3はブリッジパターンがありますが、良く見ると初めから繋がっています。
DRV8825の場合はそのままでOKです。
< 使ったモータ >


< DRV8825仕様 >

< ボードマネージャの設定 >・・・ここが鬼門よ!
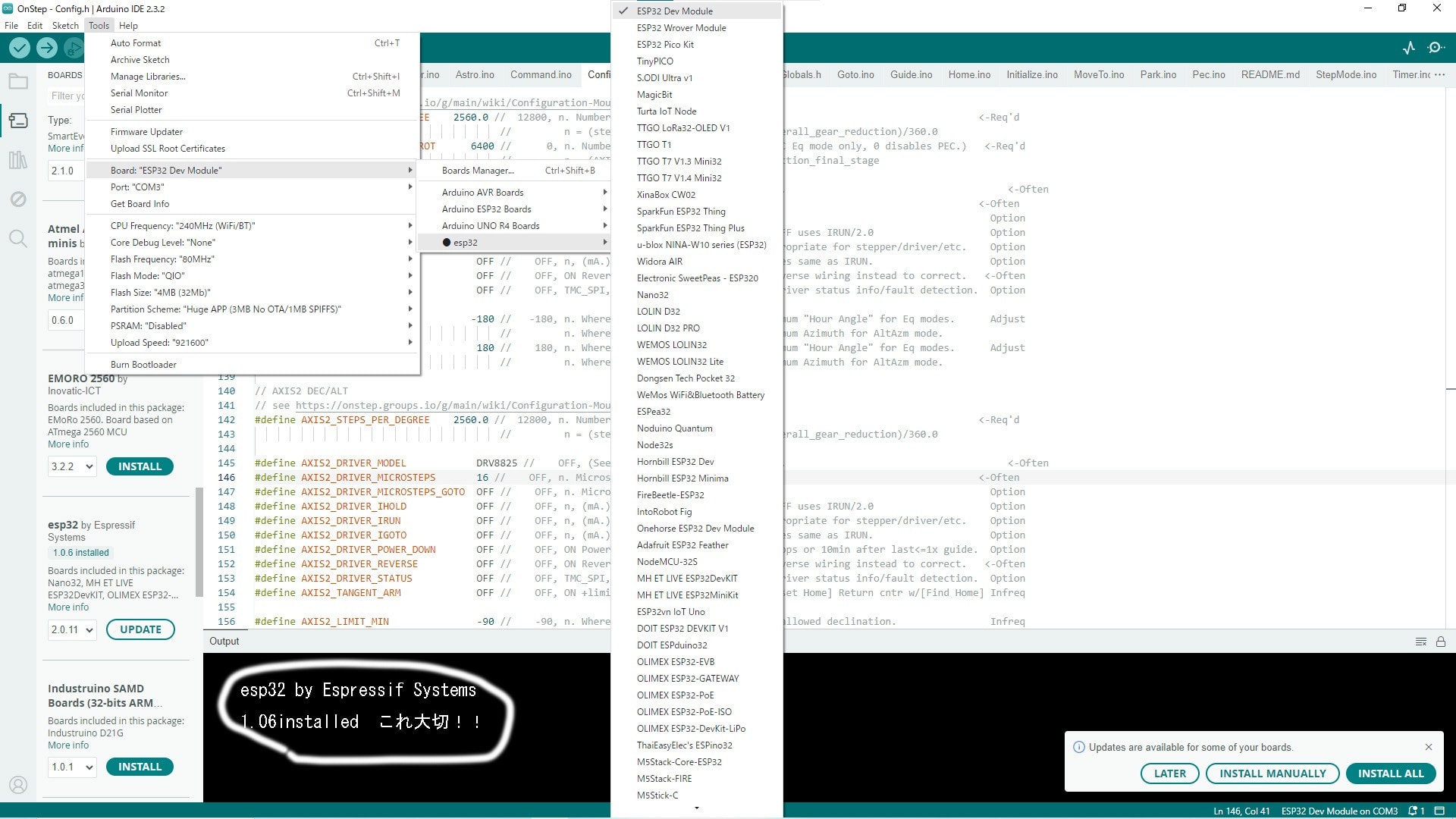
ポイント: ↑ ↑ ↑
最新の2.0.11など2.**版ではコンパイルエラーが出ます。
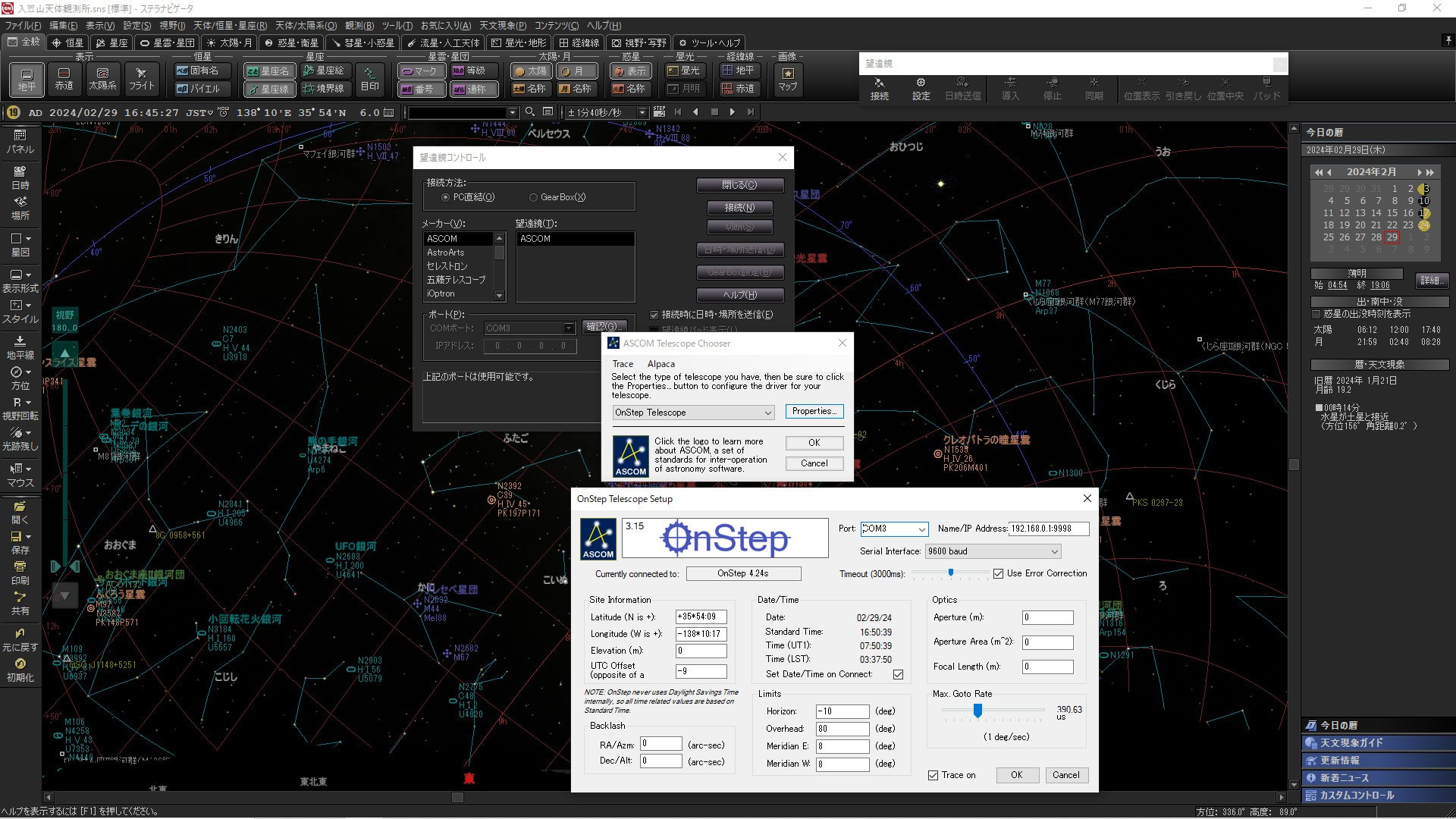
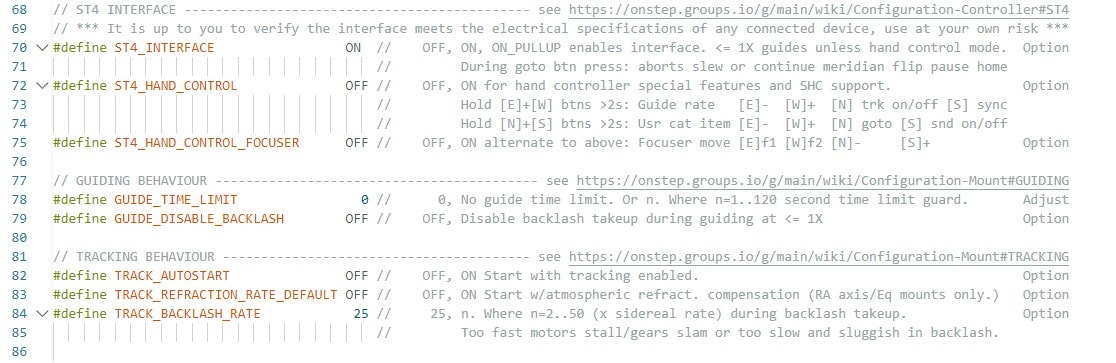
< Config.h の編集 >
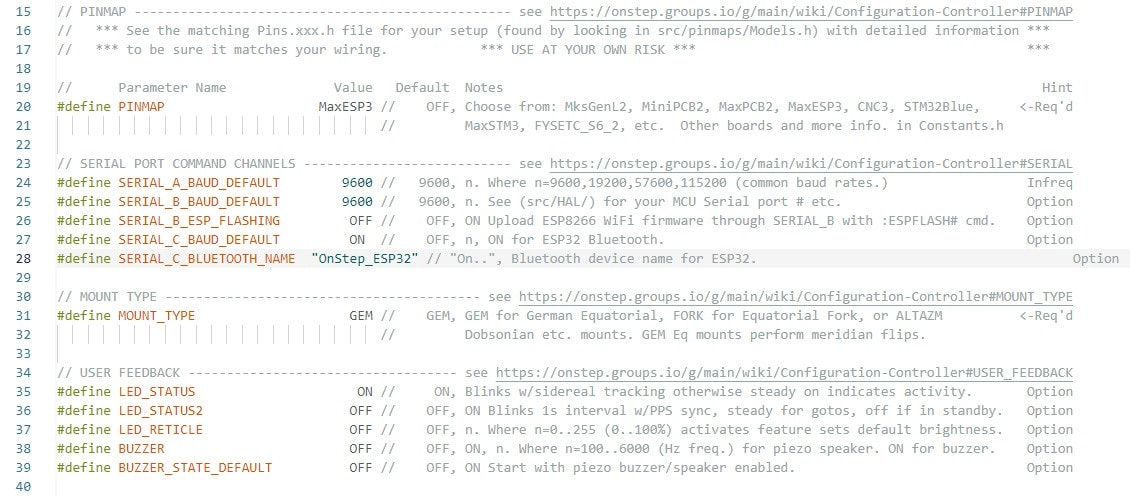
OnStep Configuration Calcuratiorにて(今回は90s赤道儀用なのでギア比が小さい)

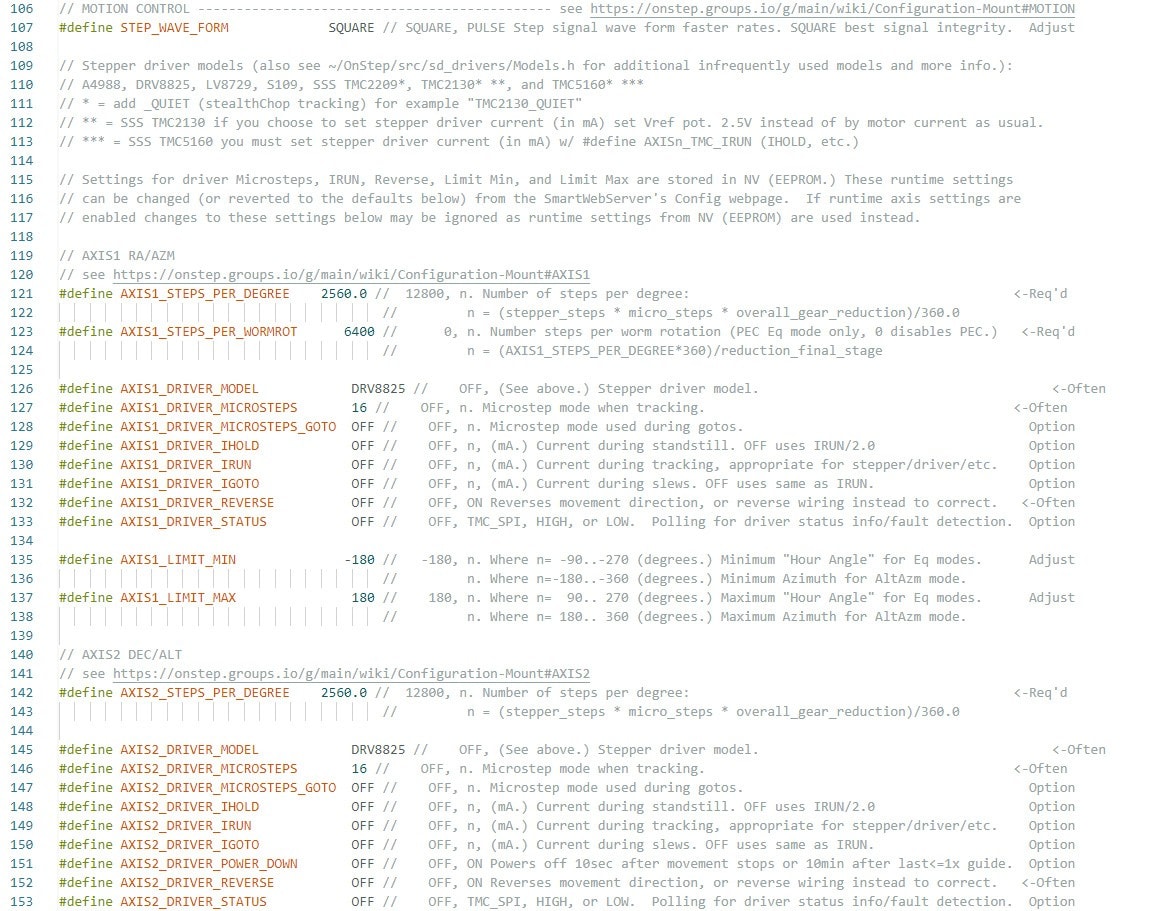
ここで、126行、145行の DRV8825 を忘れずに指定する。
これでメデタク動作しました。
今もず~っと動作し続けていますが、特に異常は認められません。
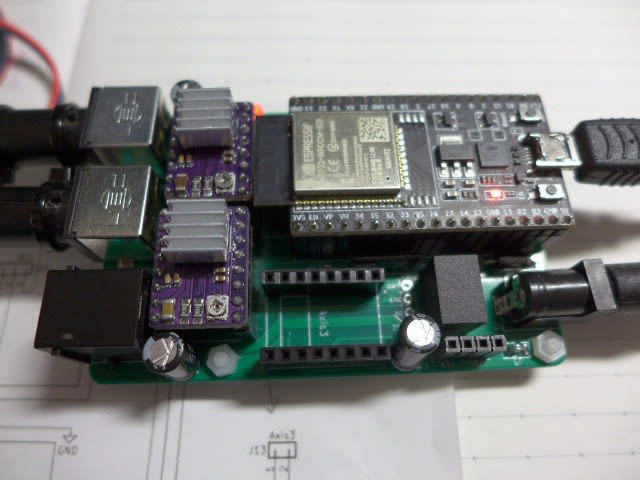
追尾中は基板上のD2_LEDがチカチカ点滅します。
電源はArduino開発環境用の9V2Aと言う小さなACアダプターです。
12V用のACアダプターが出払っていて手元に無かったのですが、これでも余裕で動作しており、
ドライバのヒートシンクがほんのり暖かい程度です。モータもほんのり暖かい程度です。
モータのL寸が長いので、結構なトルクもありそうです。
<追記:2024/05/08>
赤緯軸部分微動のウォームホイール歯数は144枚ではありませんでした。
実測の結果、216枚に変更しました。