








東京都千代田区有楽町にある東京国際フォーラムで開催された「東北大学イノベーションフェア2012」の会場で、防災対応ロボットの「クインズ」を拝見しました。被災地で人間が入れないような危険な場所でサーチ&レスキュー活動をするロボットです。
東北大学イノベーションフェアの会場に設けられた実演・デモコーナーで、防災対応ロボットの「クインズ」の動作を見せる実演が行われました。

「クインズ」はメーンのクローラに4個のサブクローラを組み合わせた駆動部で動きます。瓦礫(がれき)などのでこぼこした所では、サブクローラを駆使して乗り越えて進みます。4個のサブクローはそれぞれ独立して動かすことができるため、さまざまな姿勢を取ることができます。

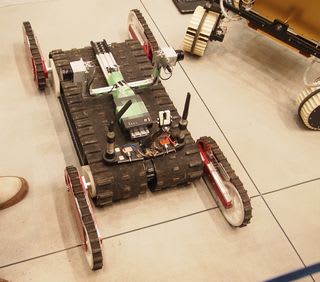
人間が遠隔操作することで操作するく「クインズ」は幅480・長さ1120・高さ420ミリメートルの大きさで、全体の質量は約26キログラムです。東北大の「クインズ」はクローラを用いて瓦礫などを乗り越えられる駆動原理を確認するもののようです。
この防災ロボット「クインズ」は、新エネルギー・産業技術総合開発機構(NEDO)が実施した研究開発プロジェクトの中で合計7台(未確認)が作製され、千葉工業大学未来ロボット技術研究センターが耐放射能対策を施した改良型「クインズ」3台を、福島第一原子力発電所の事故現場に投入しています。
第1号機は 2011 年 6 月に福島第一原発に投入され、原子炉建屋内を調査したが、操作用の通信ケーブルが切断したとのことです。このために 3 階で停止した状態になり、帰還できなかったのです。このため、さらに改良を加えた第2号機と3号機を2012年2月中旬に投入したとのニュースが伝えれられました。
東北大学イノベーションフェアの会場でも解説されていましたが、日本の大学などが開発した先進ロボットでは、「盛り込まれた各要素技術は優れているのですが、試作とその時の性能確認に終始し、実践の場で改善が施されていない」という課題が目立ちます。
試作品から実用品への道のりはまだ遠いようです。日本の研究開発成果を事業化する際の大きな課題です。
東北大学イノベーションフェアの会場に設けられた実演・デモコーナーで、防災対応ロボットの「クインズ」の動作を見せる実演が行われました。
「クインズ」はメーンのクローラに4個のサブクローラを組み合わせた駆動部で動きます。瓦礫(がれき)などのでこぼこした所では、サブクローラを駆使して乗り越えて進みます。4個のサブクローはそれぞれ独立して動かすことができるため、さまざまな姿勢を取ることができます。
人間が遠隔操作することで操作するく「クインズ」は幅480・長さ1120・高さ420ミリメートルの大きさで、全体の質量は約26キログラムです。東北大の「クインズ」はクローラを用いて瓦礫などを乗り越えられる駆動原理を確認するもののようです。
この防災ロボット「クインズ」は、新エネルギー・産業技術総合開発機構(NEDO)が実施した研究開発プロジェクトの中で合計7台(未確認)が作製され、千葉工業大学未来ロボット技術研究センターが耐放射能対策を施した改良型「クインズ」3台を、福島第一原子力発電所の事故現場に投入しています。
第1号機は 2011 年 6 月に福島第一原発に投入され、原子炉建屋内を調査したが、操作用の通信ケーブルが切断したとのことです。このために 3 階で停止した状態になり、帰還できなかったのです。このため、さらに改良を加えた第2号機と3号機を2012年2月中旬に投入したとのニュースが伝えれられました。
東北大学イノベーションフェアの会場でも解説されていましたが、日本の大学などが開発した先進ロボットでは、「盛り込まれた各要素技術は優れているのですが、試作とその時の性能確認に終始し、実践の場で改善が施されていない」という課題が目立ちます。
試作品から実用品への道のりはまだ遠いようです。日本の研究開発成果を事業化する際の大きな課題です。







1983-1990年の極限作業ロボットプロジェクトと2000-2001年)の原子力防災支援システムなどです。
このプロジェクトでは、現在のような人間が入れない厳しい環境でも活動できる防災ロボットを開発するとしています。でも、・・?
放射能に強い事故時対応ロボットも開発しています。
今回、これらが張り子のトラだったことが証明されました。