








① ""イプシロン大解剖[3];最終回 、構造の改良から強化型開発のその先へ""
(1低衝撃型衛星分離機構の分離試験 )

🚀 衛星が受ける衝撃の緩和.
ロケットから衛星を分離する際、これまでは固定しているバンドのボルトを爆薬で瞬時に切断する方法が取られていたため、非常に大きな衝撃が発生していました。 3号機から「低衝撃型衛星分離機構」を採用し、爆薬を使わず機械的にバンドの結合を外すことで、エネルギーをゆっくり開放し、衛星が放出される際の衝撃を小さく抑えます。
(2)

🚀 液体推進系の改良.
3号機では3段モータの上に小型の液体推進システム(PBS:Post-Boost-Stage)を搭載しました。 固体ロケットでは難しい精度の高い軌道投入もPBSを付与することで繊細な制御が可能となり、軌道投入精度を高めることができます。
PBSは、H-IIAロケットにも使われている技術を最大限活用しており、高い信頼性を持っています。 試験機にも同様の機能が搭載されていましたが、強化型開発におけるPBSではよりシンプルなシステムにすることで信頼性を更に向上させています。 3号機ではイプシロンとしては初の ☀ 太陽同期準回帰軌道への衛星投入を達成しました。
(3)

② 強化型開発のその先へ.
号機を重ねるごとに進化を続けるイプシロンロケットの今後について簡単に紹介します。
🚀 複数衛星搭載システム.
(4画複数衛星搭載システム)

打ち上げ需要の高まりが期待される100kg以下の超小型衛星の打ち上げ需要への対応にも着手しています。 平成30年度に打ち上げ予定の4号機では、小型衛星、超小型衛星、10cm角のキューブサットを複数同時に別の軌道に打ち上げられるシステムの開発を行っています。
🚀 H3とのシナジー効果 .
今後、長期的な運用を視野に入れ、機体、地上システム、製造設備などの技術基盤において2020年度の試験機打ち上げを目指すH3ロケットとの共通化・最適化を進めるシナジー対応開発に着手しています。 共通の技術を両方のロケットに使うことで技術力の向上や効率化を目指します。
(5)

今後、長期的な運用を視野に入れ、機体、地上システム、製造設備などの技術基盤において2020年度の試験機打ち上げを目指すH3ロケットとの共通化・最適化を進めるシナジー対応開発に着手しています。 共通の技術を両方のロケットに使うことで技術力の向上や効率化を目指します。
☀ 極軌道と太陽同期準回帰軌道 、JAXA
(軌道傾斜角がほぼ90度で、北極・南極の上空付近を回る軌道)

① 北極、南極の上空付近を回る「極軌道」
軌道傾斜角が90度、もしくはこれに近い角度の軌道のことを「極軌道」といいます。衛星が軌道を周回しているあいだ、地球が自転するため、北極・南極を含め、数日後には地球全体をカバーすることができます。そのため、全地球の観測に適しており、多くの地球観測衛星は極軌道、あるいは極軌道に近い軌道に投入されています。
(太陽同期軌道の場合は、同じ時間帯に同一地点の上空を通過します。)

② 衛星の軌道面と太陽方向がつねに一定になる「太陽同期軌道」
太陽同期軌道とは、衛星の軌道面の回転方向と周期(1日あたりの回転角)が地球の公転周期(1日あたりの回転角)に等しい軌道。つまり、地球を回る衛星の軌道面全体が1年に1回転し、衛星の軌道面と太陽方向がつねに一定になる軌道のことです。
このような軌道は極軌道でのみ可能となりますが、軌道傾斜角90度の完全な極軌道では、衛星軌道面の回転は起こらず、90度より大きな傾斜角の場合に、地球と同じ方向に回転します。
また、この軌道傾斜角は、衛星の軌道高度によってちがってきます。たとえば、高度800kmの円軌道の場合、傾斜角を98.4度にすると太陽同期軌道となります。この軌道を回る衛星から地球を見た場合、地表に当たる太陽光線がつねに一定の角度であるため、同一条件下での地球観測をおこなうのに適しています。
(太陽同期準回帰軌道では、10数日後に同一地点の上空にもどってきますが(準回帰軌道)、そのときにはかならず前回と同じ時間帯に通過します。(太陽同期軌道))
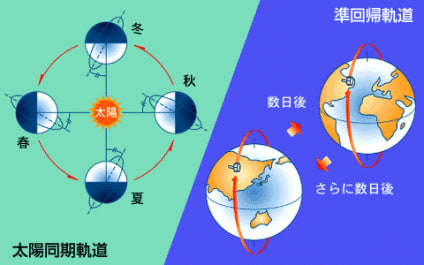
③ 地球観測衛星の多くは「太陽同期準回帰軌道」で打ち上げられている
太陽同期準回帰軌道は、太陽同期軌道と準回帰軌道を組み合わせた軌道です。この軌道に打ち上げられた衛星は、何日かの周期ごとに同一地点の上空を、同一時間帯に通過するため、同一条件でくりかえし地表を観測できます。そのため、地球を広範囲にわたって恒常的に観測するのにきわめて有効で、多くの地球観測衛星がこの軌道に打ち上げられ、全地球の観測をおこなっています。










