2020-07-01
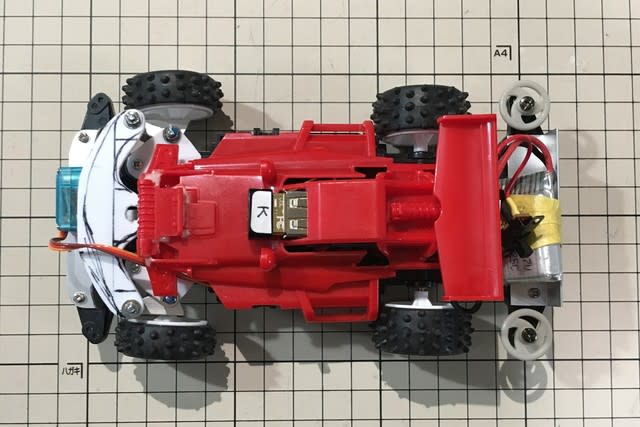
ホイールの塗装が剥げるので、PP用プライマーで下塗りをし直しました。
完璧ではないですが、かなり塗料の食いつきが改善できました。
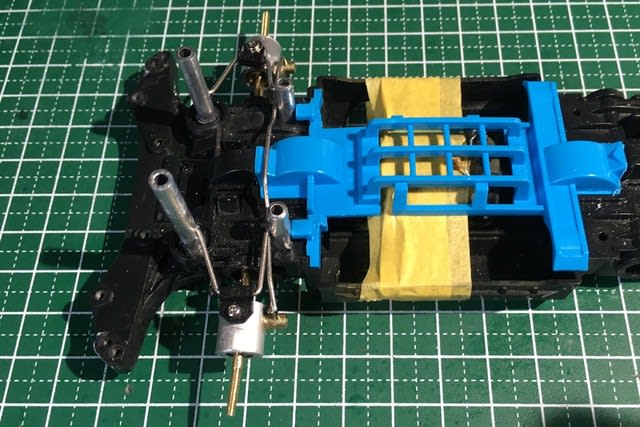
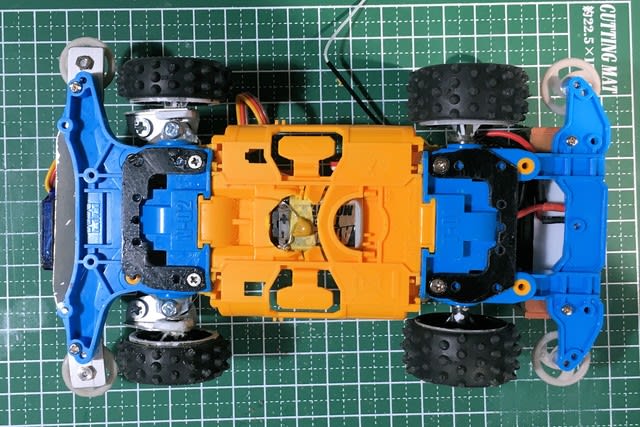
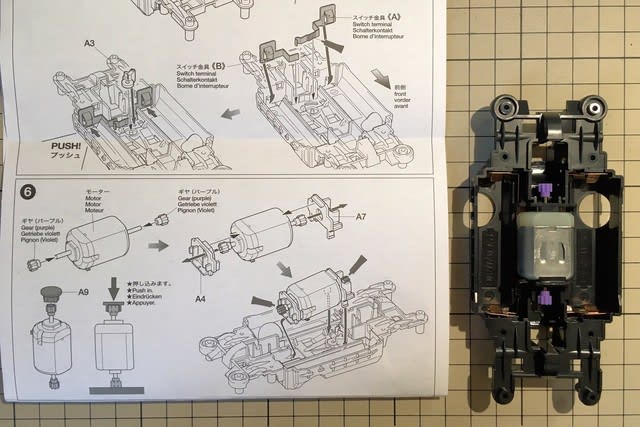
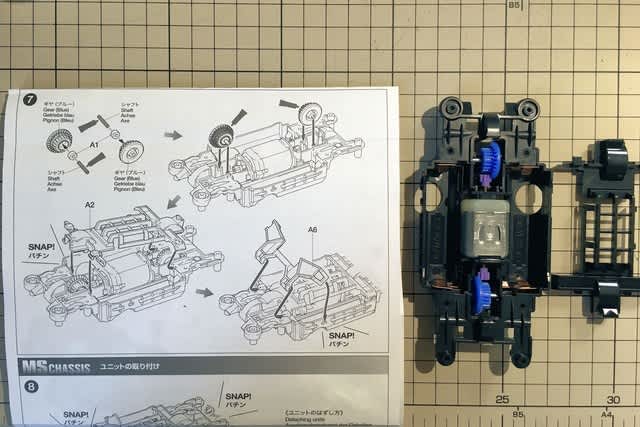
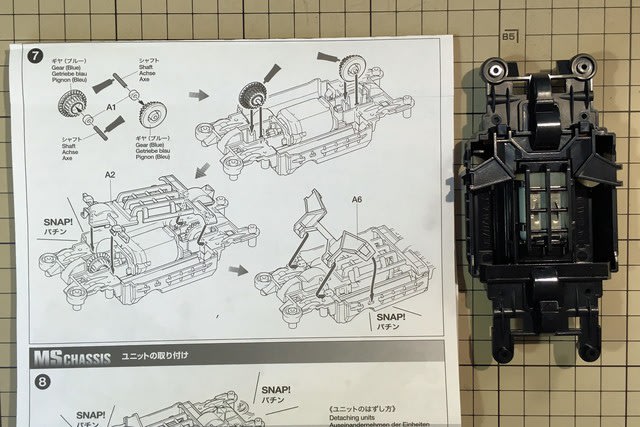
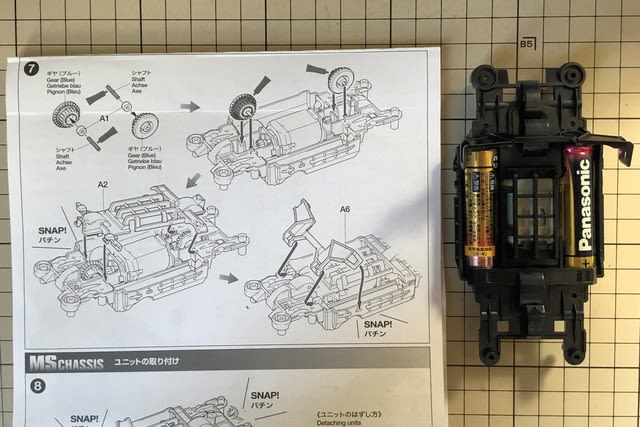
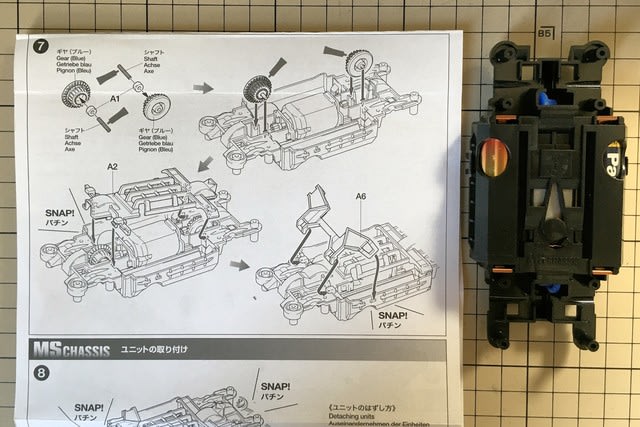
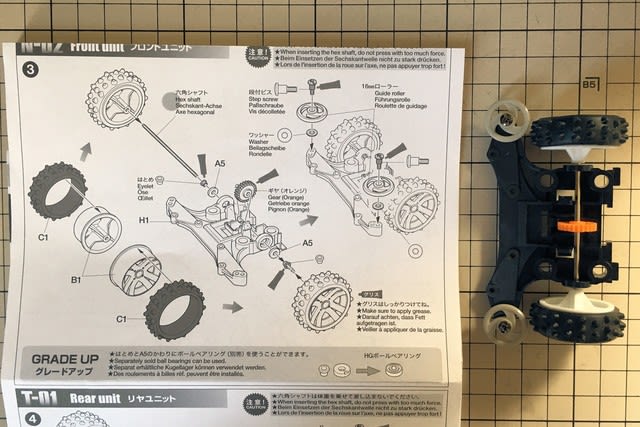
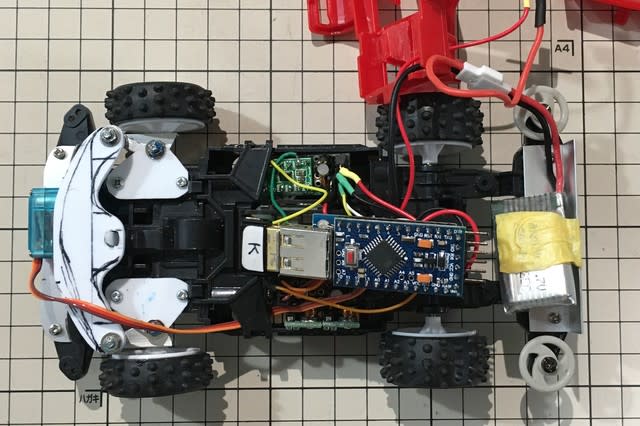
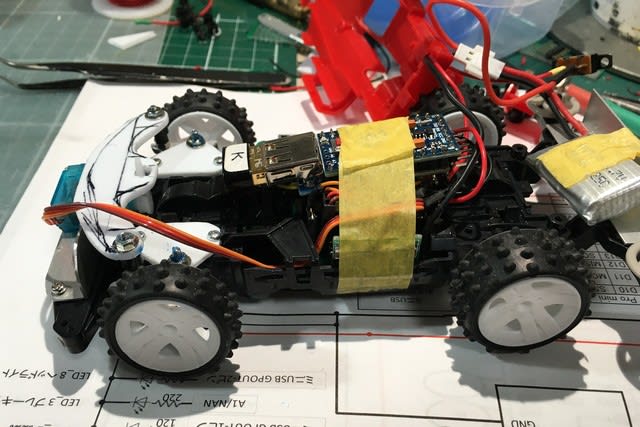
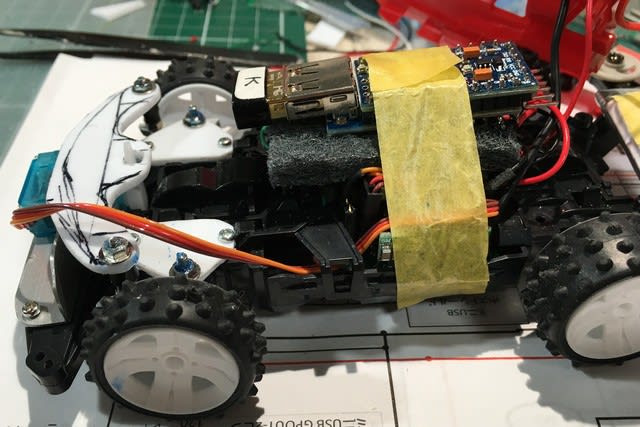
可動部分は、あっちこっちを調整してサスペンション、ステアリングが無理なく動作する様になりました。
それは嘘で、可動範囲には未だ不満が残っております。
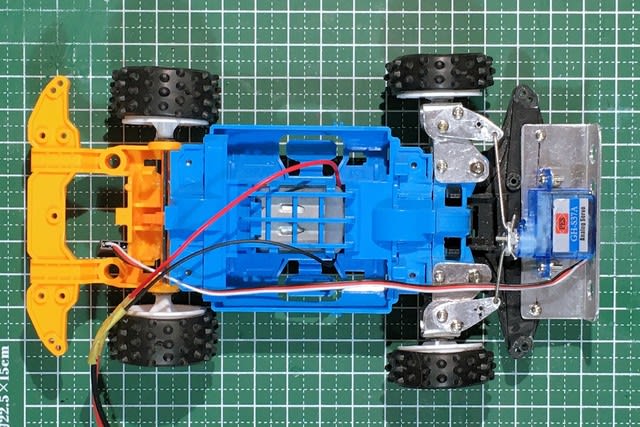
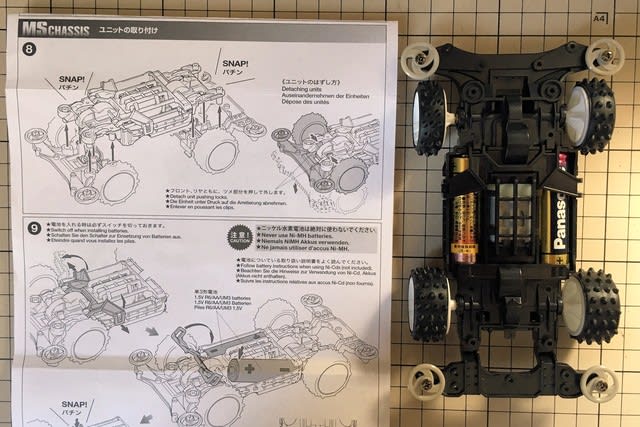
とは言っても、7月になってしまったので、一応完成と言う事にしました。
過去に製作した2台のホットショットJrと記念撮影です。




▼まとめの動画も作成しました。
RC可動化 ミニ四駆 ホットショットJr. 4輪独立懸架版
 |
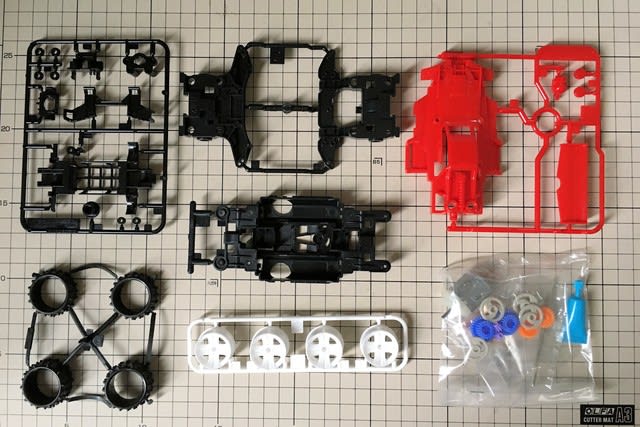
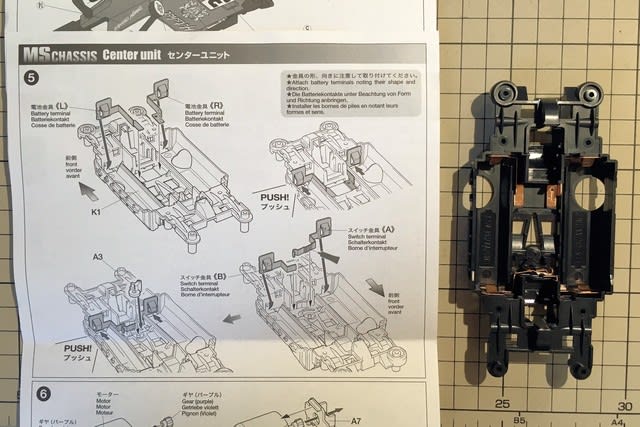
タミヤ ミニ四駆PROシリーズ No.24 ホットショットJr. MSシャーシ 18624
組み立ては接着剤不要のはめ込み式。パーツの取り付けに別途、工具等が必要。
タミヤ(TAMIYA)
|
 |
Bibipangstore 2.4 RCカーオフロード車両ボートRCトラックモデル用AX6sレシーバー付き4CHラジオリモート...
幅広い用途:この4CHリモートコントロールは、RCカーやボートに使用されます。
Bibipangstore
|
 |
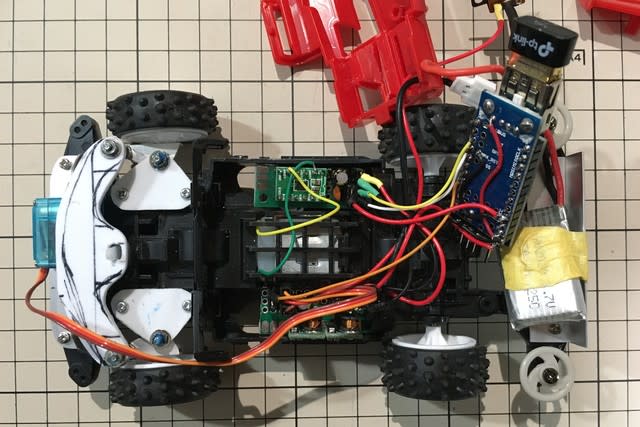
powerday RC 10A ESC ブラッシュリバーススピードコントローラ適用130 180 260 280 380ブラシモータ 付...
機能:前進、後退、ブレーキ
Rcmodel
|
 |
タミヤ メイクアップ材 ナイロン/PP用プライマー 87152
【内容量】100ml
タミヤ(TAMIYA)
|