








2022-09-29
ウェザリングマスターのライトサンドで滑り止め凸部先端などをドライブラシします。
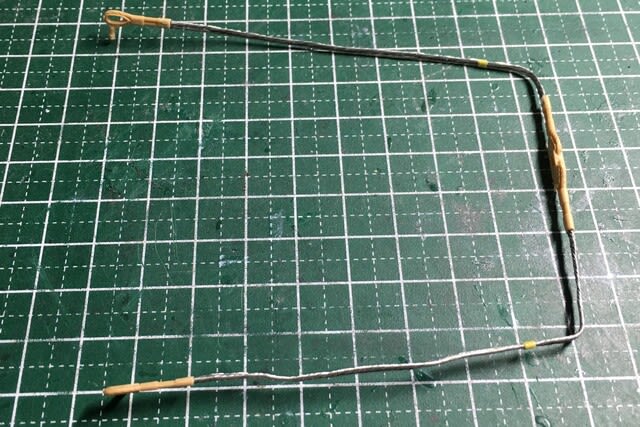
アンテナを取り付けます。
車体に0.3mm真鍮線で△金具を作って取り付け、アンテナをワイヤー(テグス)でつないで倒します。
艶消しクリアーを吹いて、完成としました。
完成です。
画像をクリックすると拡大します
画像をクリックすると拡大します
画像をクリックすると拡大します










▼プログラムに疑似砲塔追尾デモモードを追加して動画を作成しました。
RC可動 1/35 メルカバMk.1
2022-09-29
ウェザリングマスターのライトサンドで滑り止め凸部先端などをドライブラシします。
アンテナを取り付けます。
車体に0.3mm真鍮線で△金具を作って取り付け、アンテナをワイヤー(テグス)でつないで倒します。
艶消しクリアーを吹いて、完成としました。
完成です。
画像をクリックすると拡大します
画像をクリックすると拡大します
画像をクリックすると拡大します
▼プログラムに疑似砲塔追尾デモモードを追加して動画を作成しました。
RC可動 1/35 メルカバMk.1

- /*PS3_ESP32_tank_JQ6500mp3_DRV8835_merkava_v7.0
- 2022-09-29
- 【操作方法】
- PS3コントローラで操縦します。
- 車体の電源をONし、コントローラのPSボタンでペアリング開始。
- インジケータランプ4個高速点滅後に1個点灯でペアリング完了。
- コントローラーの左スティック上下で前後進、右スティックの左右でステアリングを制御。
- ステアリングを切っていくと緩旋回、一杯切るとで信地旋回する。
- また、左スティック中央でステアリング左右一杯で超信地旋回。
- △ボタンで砲身UP、?ボタンで砲身DOWN、□ボタンでセンター位置になる。
- 左スティック左右で砲塔旋回。離した位置で止まる。
- R1ボタンで主砲発射。L1ボタンで機銃射撃。
- RIGHTボタンでヘッドライト点灯、LEFTボタンで消灯。
- R2ボタンで右超信地旋回 + 砲塔左旋回 = 疑似砲塔追尾デモ
- L2ボタンで左超信地旋回 + 砲塔右旋回 = 疑似砲塔追尾デモ
- //SQUAREボタンで疑似砲塔追尾でも終了
- 砲撃時のリコイルアクション車体+砲身
- メインCPU: ESP32 DevKitC
- ボード : ESP32 Dev Module
- モータドライバ:DRV8835
- MP3プレイヤー:JQ6500 MP3プレイヤーモジュール
- */
- #include <Arduino.h>
- #include <JQ6500_Serial.h>
- HardwareSerial Serial_df(2); //16pin=RX, 17pin=TX
- JQ6500_Serial mp3(Serial_df);
- void printDetail(uint8_t type, int value);
- #include <Ps3Controller.h>
- #include <ESP32Servo.h>
- Servo servo1;
- int servo1Pin = 27;
- Servo servo2;
- int servo2Pin = 14;
- Servo servo3;
- int servo3Pin = 12;
- int LED_1 = 23; //ブレーキランプ
- int LED_2 = 22; //ヘッドライト
- int LED_3 = 19; //砲撃
- int LED_4 = 18; //銃撃
- int k = 0;
- int s = 0;
- int d_time = 30;
- int angle_servo1 = 90; // 上下
- int anglenow = angle_servo1 ;
- int angle_servo3 = 90; // リコイル
- int motor_speed;
- float steering;
- int pos_y;
- int pos_x;
- int pos_lx;
- int AIN1 = 32;
- int BIN1 = 25;
- int PWMApin = 33;
- int PWMBpin = 26;
- int PWMA = 2;
- int PWMB = 3;
- int cnt = 0;
- void setup() {
- servo1.setPeriodHertz(50);
- servo1.attach(servo1Pin, 500, 2400);
- servo2.setPeriodHertz(50);
- servo2.attach(servo2Pin, 900, 2100);
- servo3.setPeriodHertz(50);
- servo3.attach(servo3Pin, 500, 2400);
- Serial.begin(115200);
- //mySoftwareSerial.begin(9600);
- Serial_df.begin(9600); // RX2 = 16, TX2 = 17
- mp3.reset();
- mp3.setVolume(25);
- Ps3.begin("00:11:22:33:44:55"); //SixaxisPairToolで調べたmac adresに修正
- Serial.println("PS3 Ready");
- ledcSetup(PWMA, 12000, 8);
- ledcAttachPin(PWMApin, PWMA);
- ledcSetup(PWMB, 12000, 8);
- ledcAttachPin(PWMBpin, PWMB);
- pinMode(AIN1, OUTPUT);
- pinMode(BIN1, OUTPUT);
- pinMode(LED_1, OUTPUT);
- pinMode(LED_2, OUTPUT);
- pinMode(LED_3, OUTPUT);
- pinMode(LED_4, OUTPUT);
- LEDtenmetsu(LED_2);
- servo1.write(angle_servo1); // CENTER
- delay(50);
- servo2.write(90); // STOP
- delay(50);
- servo3.write(angle_servo3); // 仰角0°
- delay(50);
- //myDFPlayer.play(3); //エンジン始動
- mp3.playFileByIndexNumber(3);
- delay(500);
- }
- void loop() {
- if (Ps3.isConnected()) {
- pos_lx = Ps3.data.analog.stick.lx;
- pos_lx = pos_lx + 128;
- //砲塔旋回
- if ( pos_lx > 230) { //右旋回
- mp3.playFileByIndexNumber(31);
- servo2.write(76);
- //delay(50);
- } else if (pos_lx < 25) { //左旋回
- mp3.playFileByIndexNumber(31);
- servo2.write(104);
- //delay(50);
- } else { //停止
- servo2.write(90);
- }
- //砲身上下
- if ( Ps3.event.button_down.square) { // center
- if (anglenow > angle_servo1) {
- for (anglenow = anglenow; anglenow >= angle_servo1; anglenow -= 1) {
- servo1.write(anglenow);
- delay(40);
- }
- //delay(100);
- }
- else {
- for (anglenow = anglenow; anglenow <= angle_servo1; anglenow += 1) {
- servo1.write(anglenow);
- delay(40);
- }
- //delay(100);
- }
- }
- if ( Ps3.event.button_down.cross) { // down
- for (anglenow = anglenow; anglenow <= (angle_servo1 + 15); anglenow += 1 ) {
- servo1.write(anglenow);
- delay(40);
- }
- //delay(100);
- }
- if ( Ps3.event.button_down.triangle) { // up
- for (anglenow = anglenow; anglenow >= (angle_servo1 - 40); anglenow -= 1 ) {
- servo1.write(anglenow);
- delay(40);
- }
- //delay(100);
- }
- if (Ps3.event.button_down.circle) {
- if (s == 0) {
- s = 1;
- //myDFPlayer.play(3); //エンジン始動
- mp3.playFileByIndexNumber(3);
- delay(1000);
- //myDFPlayer.loop(5); //Loop 5th mp3 アイドリング
- mp3.playFileByIndexNumber(5);
- mp3.setLoopMode(MP3_LOOP_ONE);
- delay(d_time);
- } else {
- //myDFPlayer.disableLoop(); //アイドリング停止
- mp3.pause();
- mp3.setLoopMode(MP3_LOOP_ONE_STOP);
- s = 0;
- delay(100);
- }
- }
- if (Ps3.event.button_down.r3) {
- //myDFPlayer.disableLoop(); //アイドリング停止
- mp3.pause();
- mp3.setLoopMode(MP3_LOOP_ONE_STOP);
- s = 0;
- }
- if (Ps3.event.button_down.right) {
- digitalWrite(LED_2, HIGH); // ヘッドライト ON
- }
- if (Ps3.event.button_down.left) {
- digitalWrite(LED_2, LOW); // ヘッドライト off
- }
- if (Ps3.data.button.r2) { //右超信地旋回疑似砲塔追尾デモ
- servo2.write(104); //砲塔左旋回
- motor_speed = 165;
- motor_run(motor_speed, 0, motor_speed, 1, 0);
- delay(500);
- }
- if (Ps3.data.button.l2) { //左超信地旋回疑似砲塔追尾デモ
- servo2.write(76); //砲塔右旋回
- motor_speed = 165;
- motor_run(motor_speed, 1, motor_speed, 0, 0);
- delay(500);
- }
- if (Ps3.event.button_down.r1) { //砲撃 + リコイル(砲身&車体)
- digitalWrite(LED_3, HIGH); //主砲発光
- //mp3.playFileByIndexNumber(14);
- mp3.playFileByIndexNumber(2);
- delay(50);
- digitalWrite(LED_3, LOW);
- servo3.write(angle_servo3 + 40); // 砲身リコイル
- delay(20);
- motor_run(180, 1, 180, 1, 1); // 車体リコイル
- //digitalWrite(LED_3, LOW);
- delay(60);
- motor_run(0, 0, 0, 0, 1);
- // digitalWrite(LED_3, LOW);
- for (int ang3 = (angle_servo3 + 50); ang3 >= angle_servo3; ang3 -= 1 ) {
- servo3.write(ang3);
- delay(15);
- }
- //digitalWrite(LED_3, LOW);
- motor_run(100, 0, 100, 0, 1);
- delay(80);
- motor_run(0, 0, 0, 0, 1);
- delay(100);
- if (s == 1) {
- //myDFPlayer.loop(5); //Loop 5th mp3 アイドリング
- mp3.playFileByIndexNumber(5);
- mp3.setLoopMode(MP3_LOOP_ONE);
- delay(d_time);
- }
- }
- if (Ps3.event.button_down.l1) { //銃撃
- //myDFPlayer.play(24);
- mp3.playFileByIndexNumber(24);
- //delay(20);
- for ( k = 0; k < 6; k++) {
- digitalWrite(LED_4, HIGH); //発光
- delay(80);
- digitalWrite(LED_4, LOW);
- delay(120);
- }
- if (s == 1) {
- //myDFPlayer.loop(5); //Loop 5th mp3 アイドリング
- mp3.playFileByIndexNumber(5);
- mp3.setLoopMode(MP3_LOOP_ONE);
- delay(d_time);
- }
- }
- //走行コントロール
- pos_y = Ps3.data.analog.stick.ly;
- pos_x = Ps3.data.analog.stick.rx;
- pos_y = pos_y + 128;
- pos_x = pos_x + 128;
- /* //左スティックがセンター付近は停止(ブレーキ)
- if (pos_x > 102 && pos_x < 152 && pos_y > 102 && pos_y < 152) {
- motor_run(0, 0, 0, 0, 1);
- }
- */
- //前進
- if (pos_y <= 102 && pos_x >= 102 && pos_x <= 152) {
- motor_speed = map(pos_y, 102, 0, 0, 255);
- motor_run(motor_speed, 0, motor_speed, 0, 0);
- }
- //後進
- else if ( pos_y >= 152 && pos_x >= 102 && pos_x <= 152) {
- motor_speed = map(pos_y, 152, 255, 0, 255) ;
- motor_run(motor_speed, 1, motor_speed, 1, 0);
- }
- //前進右緩旋回、信地旋回
- //else if ( pos_y <= 102 && pos_x > 152 && pos_x <= 245) {
- else if ( pos_y <= 102 && pos_x >= 152) {
- motor_speed = map(pos_y, 102, 0, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 152, 255, 0, 255) / 255.00));
- motor_run(motor_speed, 0, steering, 0, 0);
- }
- //前進左緩旋回、信地旋回
- //else if ( pos_y <= 102 && pos_x < 102 && pos_x >= 10) {
- else if ( pos_y <= 102 && pos_x <= 102) {
- motor_speed = map(pos_y, 102, 0, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 102, 0, 0, 255) / 255.00));
- motor_run(steering, 0, motor_speed, 0, 0);
- }
- //後進右緩旋回、信地旋回
- //else if ( pos_y >= 152 && pos_x > 152 && pos_x <= 245) {
- else if ( pos_y >= 152 && pos_x >= 152 ) {
- motor_speed = map(pos_y, 152, 255, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 152, 255, 0, 255) / 255.00));
- motor_run(motor_speed, 1, steering, 1, 0);
- }
- //後進左緩旋回、信地旋回
- //else if ( pos_y >= 152 && pos_x < 102 && pos_x >= 10) {
- else if ( pos_y >= 152 && pos_x <= 102 ) {
- motor_speed = map(pos_y, 152, 255, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 102, 0, 0, 255) / 255.00));
- motor_run(steering, 1, motor_speed, 1, 0);
- }
- //右超信地旋回
- else if (pos_x >= 245 && pos_y >= 102 && pos_y <= 152) {
- motor_speed = 165;
- motor_run(motor_speed, 0, motor_speed, 1, 0);
- }
- //左超信地旋回
- else if (pos_x <= 10 && pos_y >= 102 && pos_y <= 152) {
- motor_speed = 165;
- motor_run(motor_speed, 1, motor_speed, 0, 0);
- }
- else { //停止(ブレーキ)
- motor_run(0, 0, 0, 0, 1);
- }
- }
- }
- void motor_run(int D0, int D1, int D2, int D3, int D4) {
- //D0 : モータスピード(左)
- //D1 : モータA(左)1 = HIGH / 0 = LOW
- //D2 : モータスピード(右)
- //D3 : モータB(右)1 = HIGH / 0 = LOW
- //D4 : LED_3 ON/OFF 1 = HIGH / 0 = LOW
- //analogWrite(PWMA, D0);
- ledcWrite(PWMA, D0); //(チャンネル,解像度)
- digitalWrite(AIN1, D1);
- //analogWrite(PWMB, D2);
- ledcWrite(PWMB, D2); //(チャンネル,解像度)
- digitalWrite(BIN1, D3);
- digitalWrite(LED_1, D4);
- }
- void LEDtenmetsu(int LED) {
- for (int i = 0; i < 2; i++) {
- digitalWrite(LED, HIGH);
- delay(500);
- digitalWrite(LED, LOW);
- delay(500);
- }
- }
2022-09-27
ここらでデカールを貼っておきます。
▼光沢クリアーを吹いてから、デカールを貼ります。
「<」のマークが2種類あります。
どちらが正解かわからないので、大きい方を選択しました。
このキットのデカールは番号が振られていないので特定しにくいです。


▼このデカールは何?
どうも把手だと思われますが変ですね。
▼彫り込んでみました。
排気口らしきパイプも作り込みました。
▼こちら側も排気口を追加します。
▼小さい方の「<」マークの貼る位置が判りました。
砲塔の予備履帯の間です。
▼油彩でフィルタリングをします。


▼油彩のチタニウムホワイト、ネープルスイエロー、イエローオーカーを混ぜドライブラシします。
控えめと言うか、あまり判らないですね。



後は艶消しクリアーを吹けば完了でしょうか。
何かやり残していないか、締めはもう少し待ちます。
プログラムも少しいじって遊んでみたいし……
2022-09-26
車体のウェザリングをする前に履帯を汚します。
▼汚したくない部分をマスキングします。
▼履帯の内側にウェザリングペーストのマッドホワイトを筆塗りします。
▼軽く泥汚れさせたところで、ステインブラウンで錆をのせます。
表側も同様に汚します。

▼表側は歯ブラシで擦り、金属肌を出します。
▼裏面のマスキングを剥がします。
▼ウェザリングマスターのアカサビを擦り付け、錆を立体的にします。
▼汚した履帯を装着します。
▼砲塔がスムーズに旋回するように、脱着用切り欠きを埋め、摺動部にグリスアップしました。
▼ここで間違いに気が付きました。
12.7mm同軸機銃の弾倉は左側でした。
リード線を破断しない様に気を付けて、弾倉を右から左へ移設しました。

ステインブラウンで軽く錆をボデーや、砲塔に加え、ボルト頭を白っぽく爪楊枝で塗りました。
今日はここまでとなりましたが、この後もう少しウェザリングを続けます。
2022-09-25
今日は履帯の塗装をします。
▼フリウル金属可動履帯にメタルプライマーを吹いてからオキサイドレッドサフを吹きます。
▼紙コップに巻き付けて、LP54ダークアイアンを吹きます。

▼光らせるためにMC212アイアンを筆塗りして擦ります。
▼コマンダーの塗装をします。

▼バスケットの中に荷物を収納します。
個人装備品を詰め込み、樹脂粘土で作ったシートで空いたスペースを埋めます。
ほぼ作り込みが済み、次はウェザリングです。
2022-09-24
▼車体上面の滑り止め加工をします。
タミヤ情景テクスチャーペイント(砂 ライトサンド)を筆で塗り付けます。
▼塗装が乾く間に墓参りに行ってきます。
今年も彼岸花が咲いていました。
▼帰宅すると塗装が乾いていました。
テクスチャーペイントの剥げ防止も兼ねてブラックサフを軽く引きます。
▼マスキングテープを剥がします。


▼車体色を塗る前に、転輪のラバー部分にXF85ラバーブラックを吹きます。
▼ボデーカラーのC528IDFグレー1を吹く前に明るさの異なるグレーでモジュレーション塗装をします。
転輪は牛乳パックをくり抜いたマスキングシートを宛がって吹きます。
▼ボデーも同様に濃いグレーを塗装します。
▼次にC13ニュートラルグレーを吹き、更に明るいグレーで明暗を強調していきます。
▼4段階目はC62艶消し白をモジュレーションの境界部に吹きます。
コマンダーも上方からC62を吹いておきます。
▼B&Wで明暗を塗り分けたのち、いよいよボデーカラーC528を吹きます。
何時もより薄めに希釈して、明暗の差が残るようにします。

今日はここまでで時間切れとなりました。
2022-09-23
一晩経って、やっぱり機銃を発光させることにしました。
と言っても12.7mm機銃をこれから手配するのも何だかなぁという事です。
そんな時、陳列棚のM8自走榴弾砲が目に入りました。
M8に搭載しているブローニングM2重機関銃を略奪する事にしました。

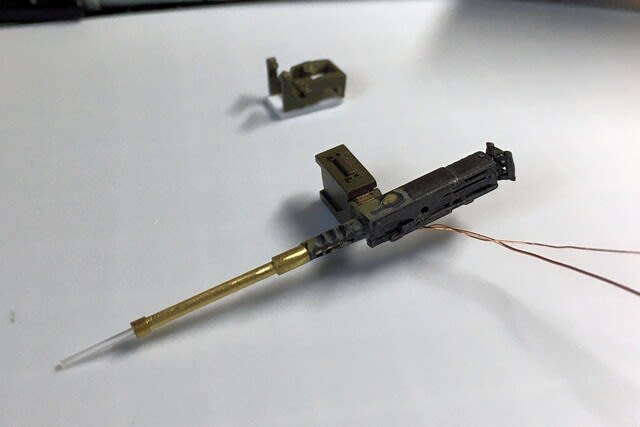
▼0.75mm光ファイバーを銃身に通したいので、銃身は真鍮パイプに取り替えます。
そして銃のボデーにチップLEDを仕込みます。
▼プラ板で架台を作り、砲塔に取り付けます。
▼塗装工程に入ります。
先ず、黒サフを吹きますが。。。。。。
この所、0.3mmエアブラシが頻繁に塗料詰まりして、うがい状態になります。
分解掃除をしているのですが、ノズルの先で詰まるのです。
▼コマンダーを搭乗させます。
下半身は切除してマグネットを仕込んでいます。


▼車体上面にマスキングテープを貼り、滑り止め加工を施す準備をします。
台風ですが、三河地区の方は結構激しく振ったようですが、幸いな事に私の所は大したことは有りませんでした。
明日は墓参りに行けるかも?
2022-09-22
メルカバのヘッドライトは片側2眼の計4灯ですが、組説では左側は黒色塗装指示です。
しかし、ネットで調べると赤色です。
既に組み付けているのは全て白色LEDでレンズはUVレジンの透明です。
▼という事で、左側を赤色LEDに取り替え、レンズはクリアレッドで塗装します。
▼今回は以前に手に入れたスリップリングを使います。
これで砲塔旋回の角度制約は無くなります。
スリップリングを中心に取り付けるために、サーボ取付板や、補強材を変更しました。

▼砲塔後部のバスケットを組み、下面にメッシュを貼ります。

▼ワイヤロープは電線(AWG24か26だったと思います)の被覆を剥き、芯線をツイストしたものに替えます。
▼0.5mmから始めて1mmの穴を2個開けて電線を差し込みます。

▼アンテナの取付け位置は組説と違うところに設置します。
そして壊れたICクリップから出てきたコイルスプリングを切ったものを基部に組込みます。
画像のハッチは二つとも開閉できるように改造しています。
▼7.62mm機銃は非常に折れ易いです。
私は2ヶ所折ってしまいました。

バスケットは砲塔上部に接着するのですが、後部がオーバーハングして砲塔下面に接着する構造です。
従ってバスケットは砲塔上下を組んでから最後に組み付ける順番になります。
しかし、メンテのために砲塔上下は接着しないので、バスケットを砲塔上下に接着できません。
どうしたものかと悩みましたが、
ギリギリですがバスケットを砲塔上部に接着しても、砲塔下部を滑り込ませて組上げる事が出来ました。
ラッキーでした。
ほぼ小物パーツも組付けたので、そろそろ塗装工程に入れます。
残念ですが、7.62mm機銃を発光させるのは難しいです。
このキットには12.7mm同軸機銃は用意されていません。
メルカバ用の同軸機銃セットが有れば良いのですが……
2022-09-19
主砲の加工を続けます。
▼砲身にLEDを取付けます。
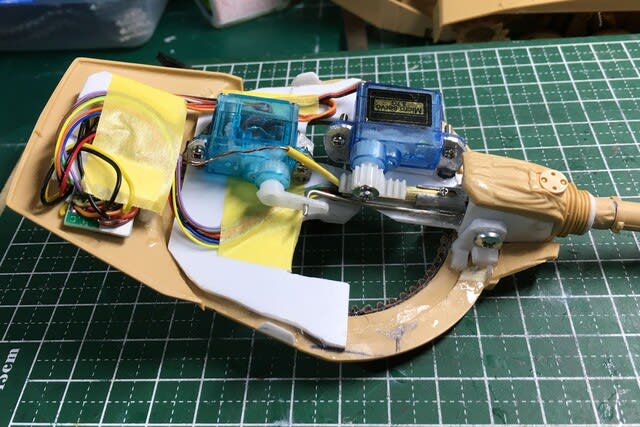
▼砲身リコイルの仕掛けをします。
▼砲身リコイルの仕掛けです。
今回はラック&ピニオンで砲身を前後させます。
随分前にAmazonで購入したギヤセットのラックを使います。
歯の直ぐ下で切断して、砲身に結合した真鍮パイプに接着します。
ピニオンギヤのシャフト穴を広げてサーボに取付けます。
▼砲身を上下させるサーボを取付けます。
砲塔下部には力がかかった時に変形しない様に3mm角プラ棒を2段積みにして補強しました。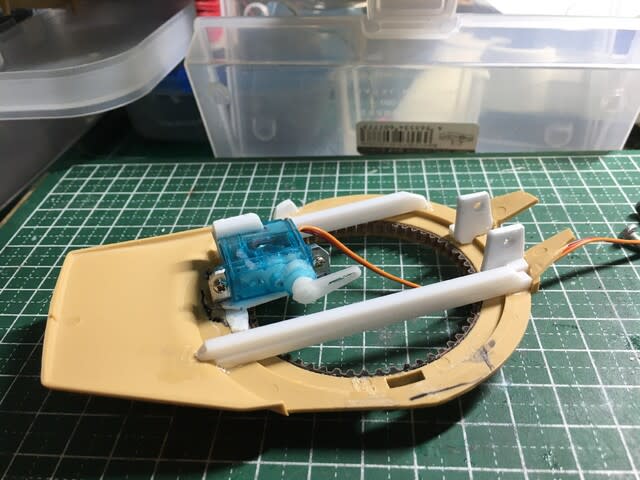
▼砲身ユニットを組み込みます。

▼砲塔上部を被せます。
内蔵物にはギリギリですが接触していませんが、少し隙間が気になります。
前後4ヶ所にマグネットを付ければ何とかなりそうです。
エリザベス女王の国葬中継が始まるので、今日はここまでとします。
台風の影響で風が強いです。
2022-09-18
10時に壊れたTVをK店に持ち込み、家電リサイクル処理をしました。
郵便局で家電リサイクル券(2,970円)を購入(手数料312円)して、
最寄りの指定引取場所へ持ち込む事も考えましたが、
早く片付けたかったので収集・運搬料金(2,200円)を支払って引取ってもらいました。
突然のハプニング対応が終わったので、メルカバの製作を再開します。
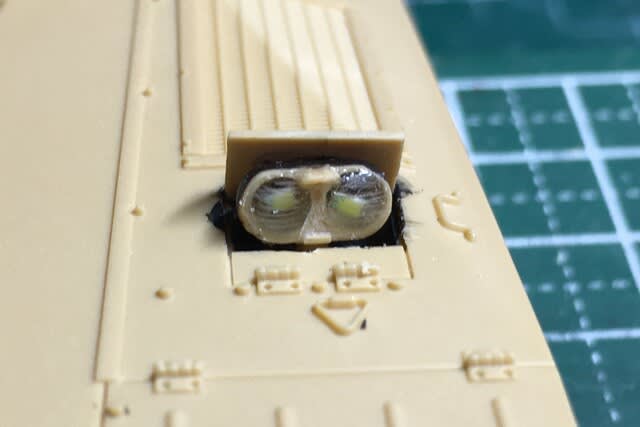
▼先ず、右側のヘッドライトを改修します。
画像では問題ない様に見えるのですが、左側は1眼毎に1個のLEDを仕込んでいますが、
右側は2眼を1個のLEDで点灯しています。
その為、光り方に差が有り気になっていました。
▼ドリルで穴を開け直し、LEDを仕込み直します。


▼やっただけの事は有り、イイ感じに点灯。
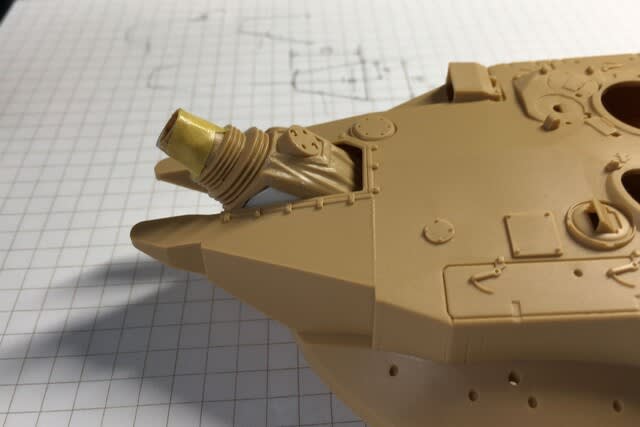
▼主砲の上下可動化ですが、こんな風になりました。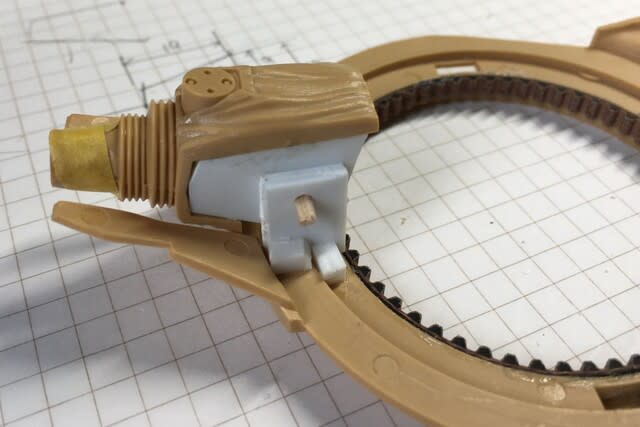
▼メンテのため、砲塔の上下は接着しません。
その為、接着しなくてもガタや隙間が出来ない様にしておきます。
先ず、砲塔最前部のパーツ分割を変更します。

▼砲身を上下させるとキャンバスシートと砲身基部の間に隙間が出来ます。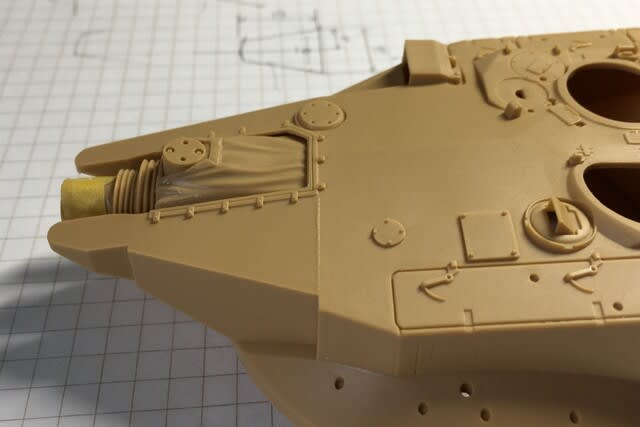
▼一寸見苦しくなりますが、隙間を隠す仕掛け(目隠し)を仕込みます。
マックの紙ナプキンをキャンバスに被せ、その上にレジンを塗り、紫外線で硬化させます。
▼目隠しを付けてみました。
多少、難は有りますが、この方法で妥協します。

▼砲塔上部の開き補正と、下部パーツとの位置合わせのために差し込みと受けを増設します。
勘合は何時もの様にマグネットを使いますが、砲塔内の仕掛けの検討後に設置します。
2022-09-17
2ヶ月前にダイニングの液晶TVが壊れて買い換えたのですが、今朝、リビングの液晶TVも壊れました。
このREGZA 40J7を購入したのは2013年6月です。
平均寿命9年くらいと聞いたことが有るので、寿命と納得するしかなさそうです。
実はこのTV、2017年5月に突然映らなくなり修理しています。
その時は5年保証で無償でボード交換修理をしています。
交換したボードは新品ではなく、メンテ交換用とみられるものでした。
ボード交換してから5年経ちました。
この製品の寿命は5年という事なのか、交換したボードも同じ時期に生産された物か?
何れにせよ、そろそろ買い換えたいと思っていたところでした。
早速、家電量販店へ行きます。
先ず、近くのE店。
売りつくしセール中で通常より値引きしていますが、希望条件の商品が少ないです。
店員さんに値引き交渉して一旦帰宅。
続いて、もうちょっと遠いK店に行きます。
TVの種類はそこそこ有ります。
使い慣れたREGZAで2番組同時録画、4K対応の機種を探します。
すると43Z570Kが特別値引きで販売されています。
2021年モデルですが気にしません。
早速、店員さんと価格交渉。
特価価格より更に引いていただけたので即決しました。
持ち帰ってセットし始めて気が付いたのですがandroidtvでした。(遅い!)
気になったのはリモコンの対応が少し遅い事ぐらいです。
【セットアップ中にトラブった事】
① 録画用外付けHDDをUSBポートに接続しましたが録画用HDDと認識せず焦りました。
販売店に問い合わせたところ、店頭販売員の方が直ぐに対応してくれて、
側面ではなく、裏面のUSBポートが録画用USBポートだという事です。
TVを設置すると裏面は見にくいので判りにくいですよねと言われちゃいました。
② インターネット接続に関して
有線LANケーブルでのインターネット接続は出来ました。
そのまま、無線LANも設定しておこうとWiFiをONにして利用可能なネットワークを選びパスコードを入力します。
しかし、接続テストでは「*******が見つかりませんでした」とエラー表示が出ます。
色々調べた結果、有線LAN接続時には無線LANの接続は出来ないとの事でした。
これは取説の「機能操作編」に書かれていましたが、製品にはこの取説は添付されていないのです。
ネットでダウンロードする事のようです。
これって不便ですね。
androidtvで何が出来るかはまだまだですが、
テレビを見る事と録画する事は出来る様になりました。
後片付けやなんやらで、メルカバには手を付ける事が出来ませんでした。
2022-09-16
誘導輪は良く回りますが、グラグラなので少し手を入れます。
▼3mmベアリング(外径7mm)を使用します。
誘導輪は内外パーツを接着済みで剥がす事が出来ません。
注意して、ベアリングを挿入する7mmの穴を開けます。
4mm、5mm、6mm、6.5mmと少しずつ穴を大きくしていきます。
しかし、肝心の7mmのドリル刃は持っていません。
ビットの六角軸の対角が7mmなのでこちら側を利用して7mm穴を開けます。

▼タミヤのこのキットですが、主砲を上下させる事が出来ません。
▼砲身基部のキャンバスの対処が出来ないので固定にしてしまったのでしょう。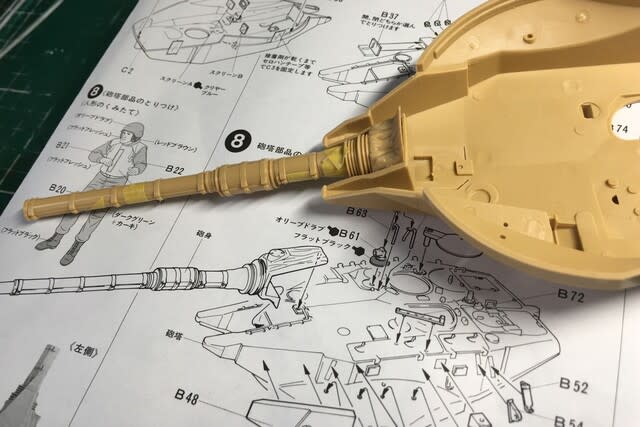
主砲の可動化は後にしてヘッドライトの電飾加工をします。
▼キットのままだとこうなります。


▼右側のライトは透明塩ビ板を介して1個の3mm砲弾型LEDで光らせます。
▼左側はチップLEDを装着します。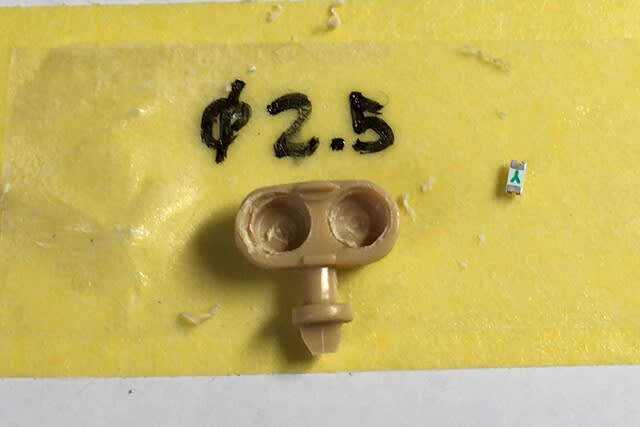
▼大チョンボです。
左側に使ったチップLEDの色がウォームホワイトでした。
それも、かなり黄色っぽいです。
▼今日はここまでにしようと思いましたが、気を取り直してLEDを取り替えました。
2022-09-15
車体の走行システムが出来上がったので、履帯の製作です。
▼中古で購入したフリウルの金属可動履帯です。
使用枚数はタミヤのベルト履帯と同じ100枚としました。
▼購入した箱には何故か真鍮線ではなく、磁石がくっつく0.4mmメッキ線でした。
流石にそれは無いだろうという事で、0.4mm真鍮線を別途購入しました。
必要な長さは16mmです。
手動送り定寸法カットマシーンで切り出します。
何時も使用しているニッパーが刃こぼれして0.4mm真鍮線を上手く切断できないので、100均ニッパーの登場です。
▼角材の上に両面テープを貼り、履帯を50枚並べます。
▼0.5mmドリル刃で穴を通しておきます。
▼50枚組めました。
▼ベルト履帯と比べてみます。
ベルト履帯は可動させないなら問題ない出来だと思います。
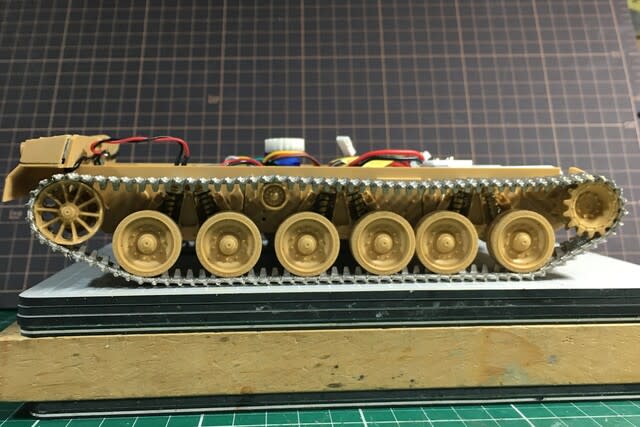
▼100枚連結して巻いてみますが、短くて巻けませんでした。
5枚増やして105枚に変更して片側だけですが巻いて動かしてみます。
▼前進は良い感じですが、後進で問題発生です。
起動輪の後ろに大きな弛みが発生してサスに接触しています。
メルカバは上部転輪が少なく、弛むと走行困難になります。
▼1枚減らして104枚に変更しました。
この枚数で前進、後進、共に走行に問題無く、最終決定とします。

▼走行テストの動画です。
前進、後進、緩旋回、信地旋回、超信地旋回の動作を確認しました。
▼ツッコミのある前に訂正します。
サスペンション上部に上部支持輪を取付忘れしていました。

2022-09-14
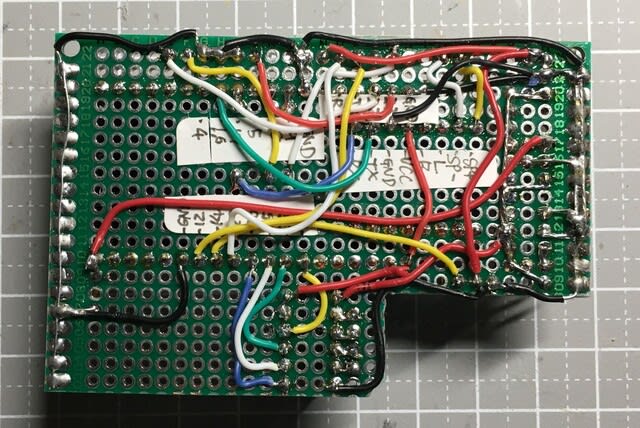
昨日から続いてコントロール回路基板の製作です。
ドラゴンM26と部品配置は違いますが、回路自体は同じでIR対戦仕様でないのでサクサクと進みます。
▼という事で、コントロール基板は完成です。
M26より前後が長いのでスピーカを大きくしました。
▼コントロール基板単体の画像です。
備忘録として撮影しておきました。
▼テールライトをLED電飾加工します。
ストップランプ部をくり抜き、クリア樹脂を削って差し、後ろから赤色チップLEDで光らせます。
光漏れしない様にシルバーで遮光塗装します。

▼左側も同様の加工をし、車体内部へ配線を引き込みます。

▼点灯確認します。
▼これでリアパネルを車体に取り付ける事が出来ます。
このキットは有り難いことに車体上下が接着せずに接合できるように作られています。
方法は後ろの爪を差し込み、前側をポリキャップにボスを差し込むだけです。


2022-09-13
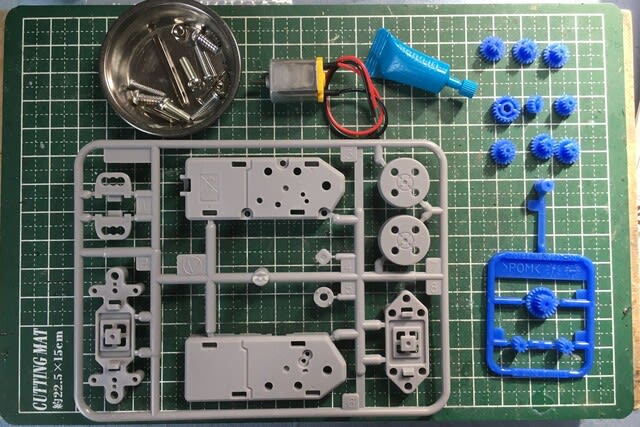
▼今回使用するモータ付きギヤボックスです。
ネットで調べた限りでは、何とか収納できそうです。
▼車体に載せてみます。
ケースを少し削らないと上手い位置に取り付きません。
▼出力軸のシャフトはもう少し長くないといけません。
手持ちの3mm六角シャフトに取り替えます。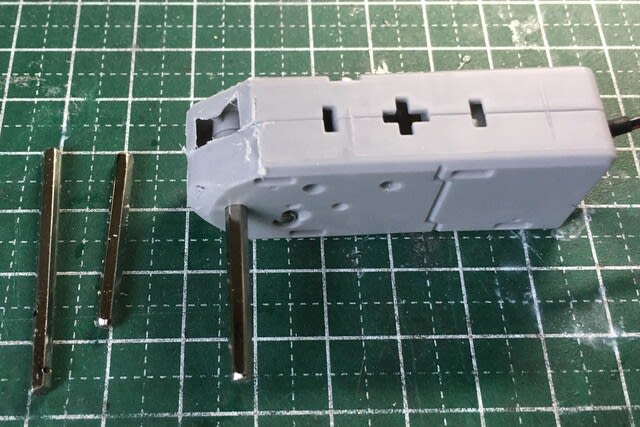
▼車体に取り付けて確認します。
▼もう1台も同様の加工をし、固定補助材を付けて車体に固定します。
起動輪はM3.5六角ナットを介して固定します。(ガタつきが有るので瞬着も使用)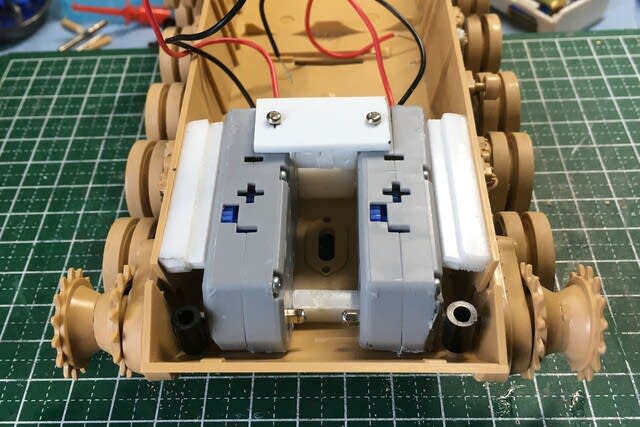
▼砲塔を旋回させるのですが、砲塔下部に手を加えないとベルトが巻けません。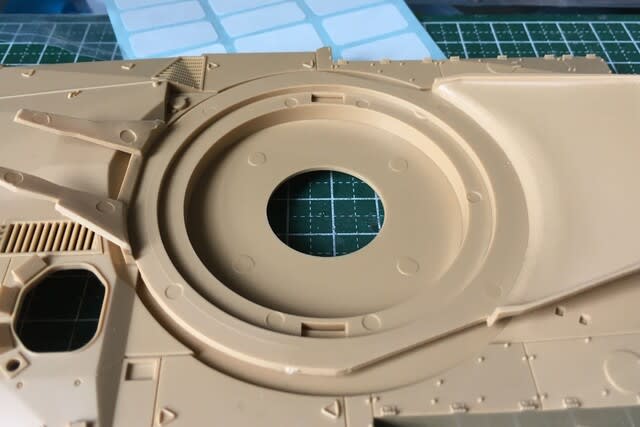
▼スジボリで少しずつ掘り、最後はデザインナイフで切り取りました。
▼ドライブベルトを巻き、ボンドで固定します。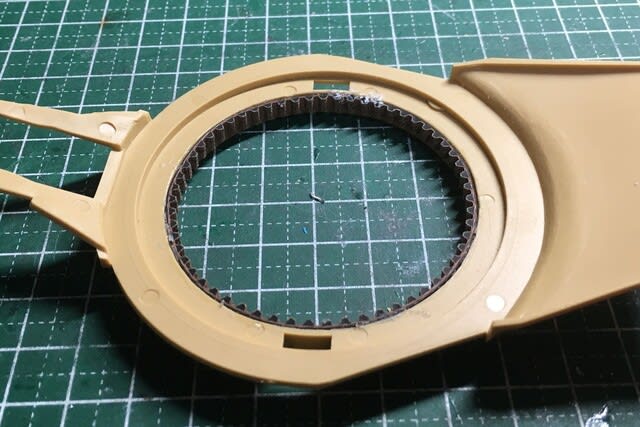
▼連続回転仕様のSG90-HVをアルミ板を加工した取り付けステーを介して車体に固定します。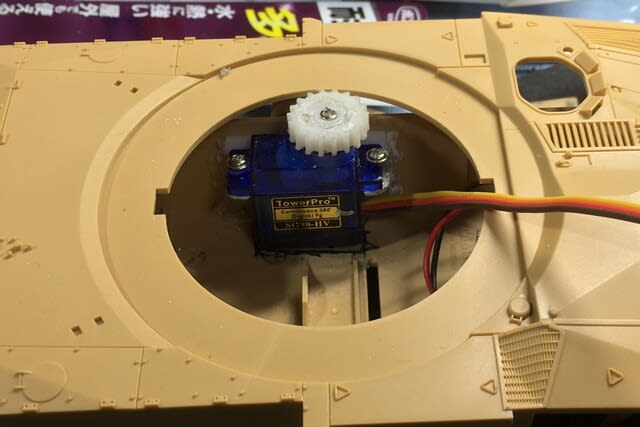
▼ベルトを巻いた砲塔下部を取り付け、プーリーとの噛み合いを確認します。
▼コントロール回路基板を作ります。
今回使用するESP-32、モータドライバ、5V昇圧コンバータなどの配置を決めます。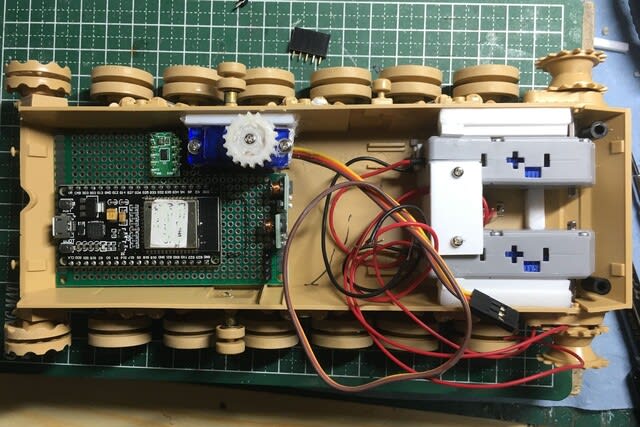
今日はここまでです。
明日も、引き続きコントロール回路基板の製作を進める予定です。
▼Amazonは少し販売価格が高いように思いますが。。。。
 70245") |
タミヤ 楽しい工作シリーズ No.245 ミニモーター 薄型ギヤボックス(2速) 70245
組み立てが必要な工作キット。別途、工具等が必要。
タミヤ(TAMIYA)
|
 54448") |
タミヤ ホップアップオプションズ No.1448 OP.1448 XV-01 強化ドライブベルト (573サイズ) 54448
対象性別 :男の子
タミヤ(TAMIYA)
|
 53989") |
タミヤ OPパーツ OP.989 センタープーリー (18T) 53989
対象性別 :男の子
タミヤ(TAMIYA)
|
 |
WayinTop ESP32開発ボード Wi-Fi + BLEモジュール ESP-WROOM-32実装済み デュアルコア 技適取得済み 2個...
ESP-WROOM-32が実装されているWi-Fi + BLE開発用ボードです。AP、STA、AP + STAの3モードをサポートしま...
WayinTop
|
 |
パワーモジュール昇圧コンバータ DC-DC昇圧 電源昇圧モジュール 10個1.5V 1.8V 2.8V 3V 3.3V 3.7V 4.2V...
【入力電圧】:0.9〜5V。 出力電圧:5V。 変換効率は最大85%まで可能です。
Hilitand
|