2022-06-29
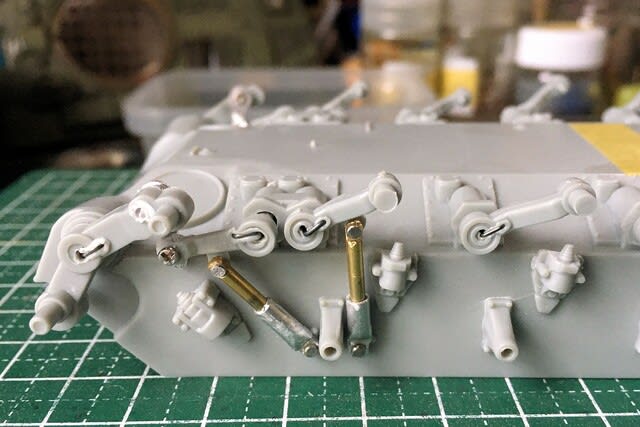
このドラゴンのキットには箱絵で描かれている牽引用ワイヤケーブルが有りません。
タミヤにはフィギュアも付いていたのに、残念ですね。
▼ならば、作るまでですね。
使う材料は水糸、真鍮パイプ、真鍮線です。
MC212Mr.メタルカラーアイアンを筆塗りしています。
▼ついでにはんだ線を叩いて薄くしたものを切り出し、ワイヤー固定フックも作ります。
加工はこの辺にして、塗装工程に入ります。
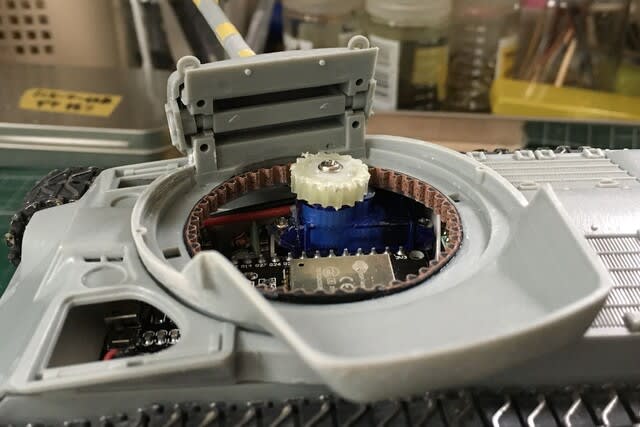
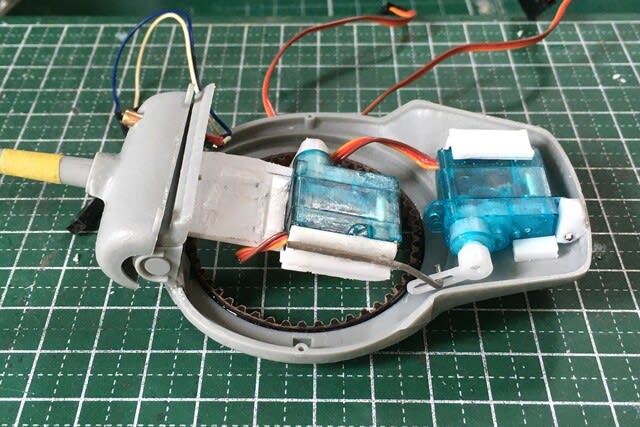
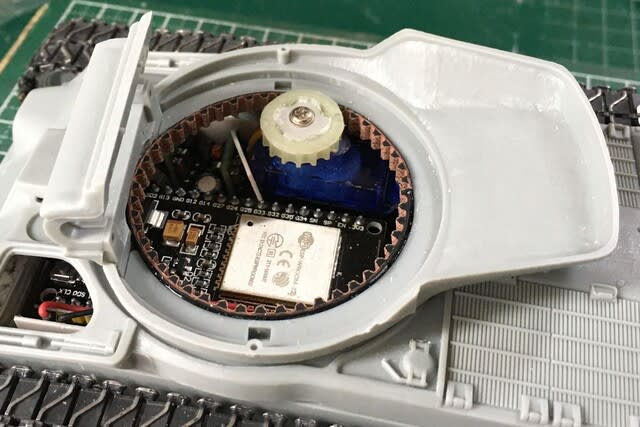
▼マスキングして電装品に塗料がかからない様にしておきます。
▼先ず、Mr.フィニッシングサーフェイサー1500(ブラック)ビンタイプをエアブラシで吹きます。
手持ちの残り量が足りないので、車体下部はオキサイドレッドサフを吹いて黒塗装しました。
塗装中はクーラーを動かしていないので、汗だくです。
という事で、一旦中断します。
午後からはクーラーをつけて作業再開です。
▼シャドー吹きのブラックは省略。
1色目の濃いグレー(C13ニュートラルグレー + C33艶消しブラック)をシャドーを残す様に面毎に吹きます。
▼2色目はC13を吹きます。
▼3色目の明るいグレー(C13+C62艶消しホワイト)を吹きます
▼明暗の塗り分けが済んだ所で、ベースカラーのC38オリーブドラブ(2)を通常より薄めに希釈して全体に吹きます。
▼カラーモジュレーションセットのODハイライト2をより明るい面に吹きます。
▼ボルト頭にODハイライト2を爪楊枝で塗ります。
細部の塗り分けは次にして、今日はここまでです。