2020-04-07
前回、タミヤの「楽しい工作・バギー工作基本セット」をRC化工作をしました。
未だ組み上げたいプラモが見つからないので、ミニ四駆をRC化工作する事にしました。
ミニ四駆を作るのは初めてです。
製作に先立って、ネットでミニ四駆のRC化工作の参考になりそうなものを調査します。
本来、ミニ四駆は専用コースを走るため、ステアリングは無く、真っすぐ走る事しかできません。
上手くステアリング機構を組み込めるかどうか?
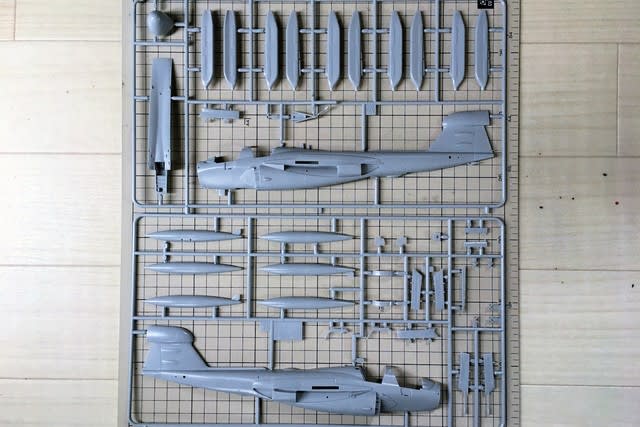
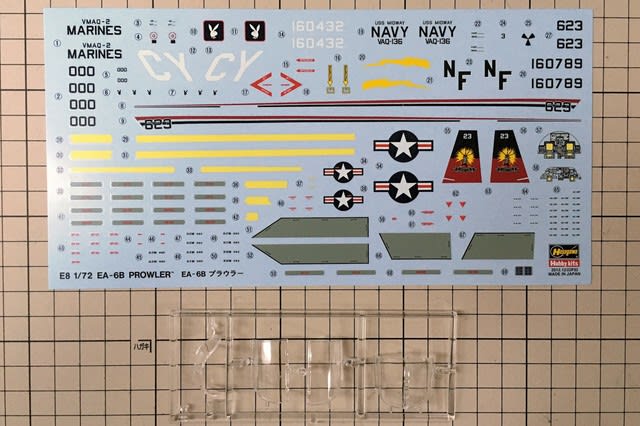
購入したものは、タミヤのミニ四駆 ホットショットJr.です。
パーツはこれだけです。
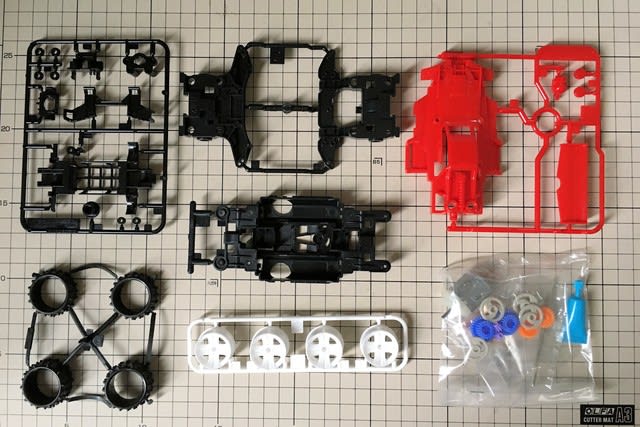


先ず、そのまま組み立ててみます。
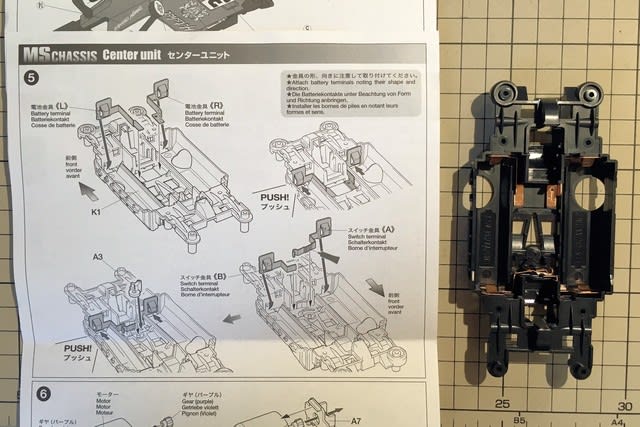
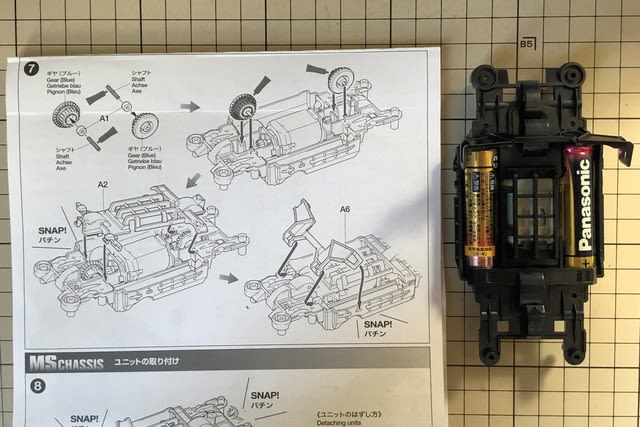
と言っても、手順5のシャーシーの製作からです。
センターユニットに電池ターミナルを取付けます。
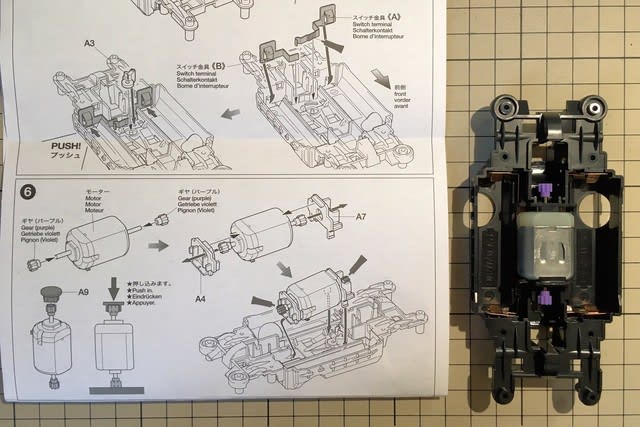
モータを組み込みます。
クラウンギヤをセット。
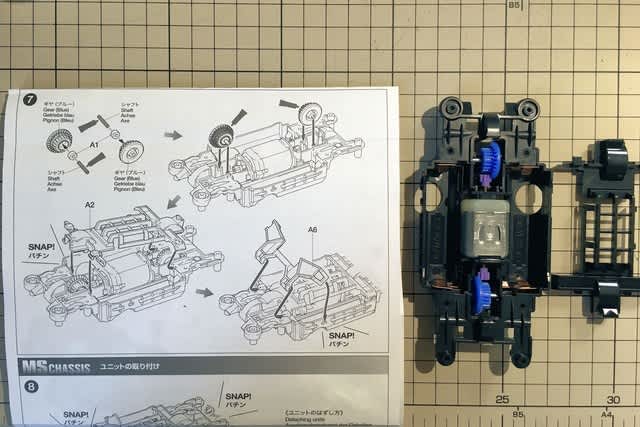
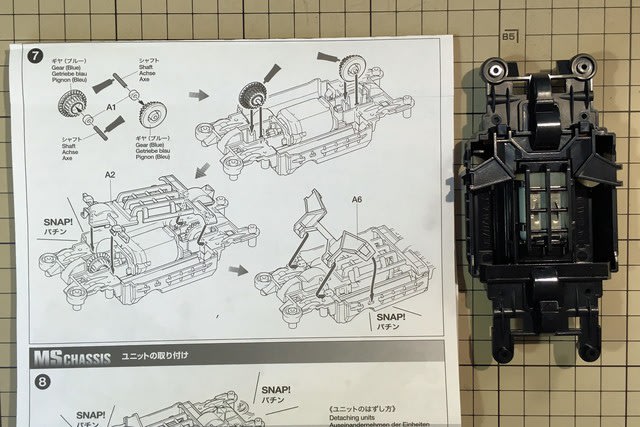
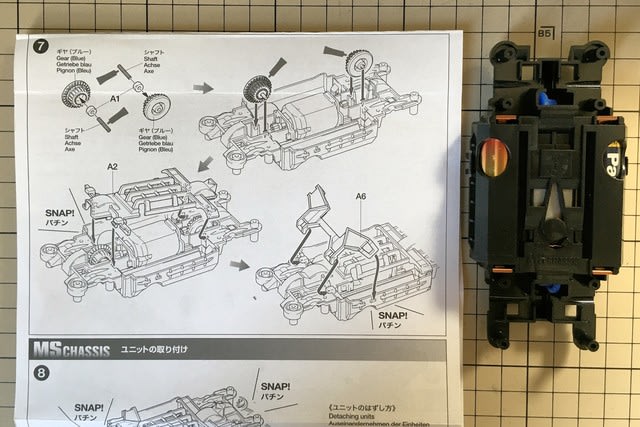
カバーを取付けます。
電池を組み込んで動かしてみます。
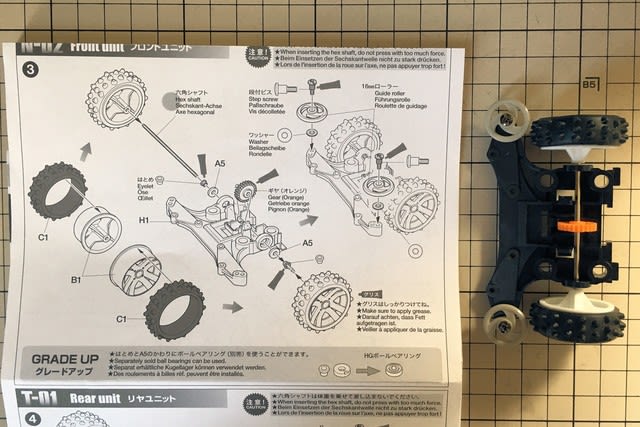
フロントユニットの組立。
リヤユニットの組立。
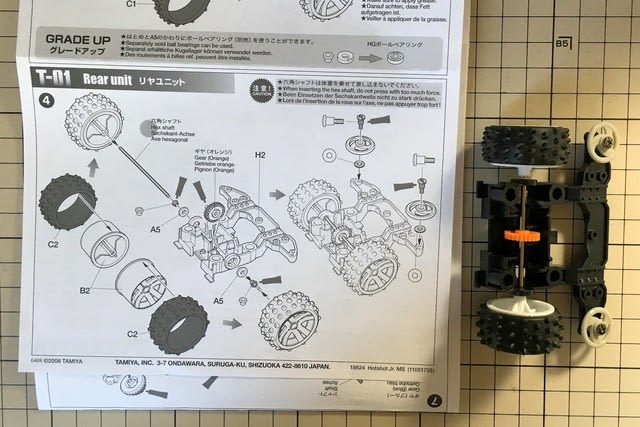
フロント、センター、リヤユニットを合体。
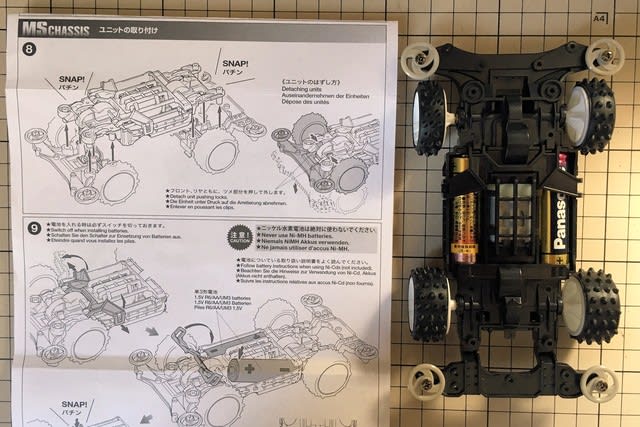
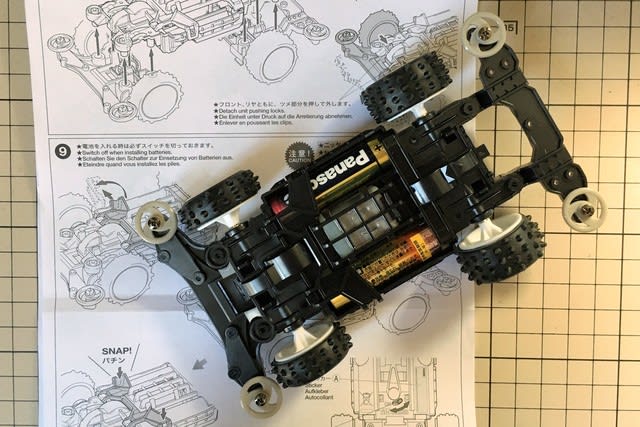
接着剤無しでカチッと組み立て出来ました。
実に上手くできています。
さて、フロントにステアリング機構を組み込みます。
四駆のままステアリングを追加鶴には、ユニバーサルジョイントが必要です。
ネットで実現されている動画を見ることが出来ましたが、現在の私にはハードルが高すぎます。
と言う事で、二駆(後輪駆動)にします。
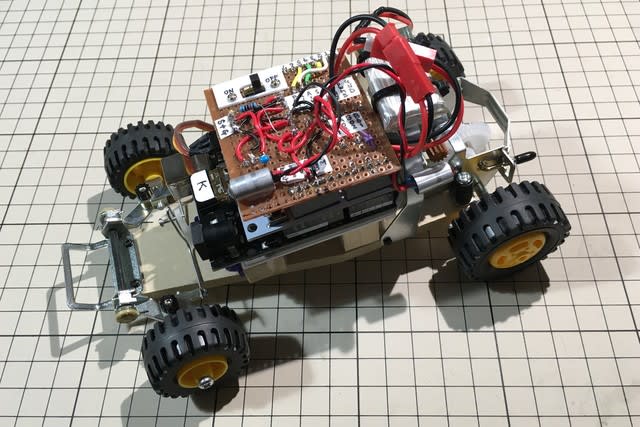
途中経過を飛ばして、こんな具合になりました。
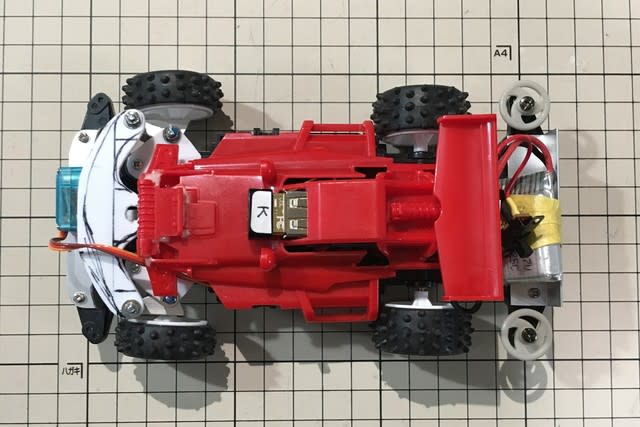

ボデーを外すとこのようになっています。
左からサーボ、タイロッド?
中央上からモータドライバ、Arduino+USBホストシールド(Bluetooth)、DD昇圧コンバータ
その右にLiPoバッテリー。
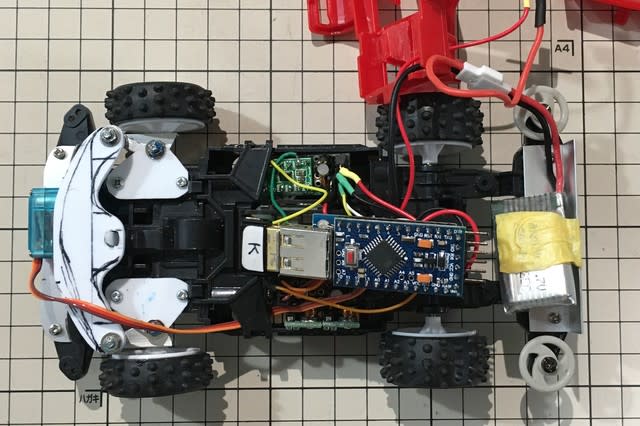
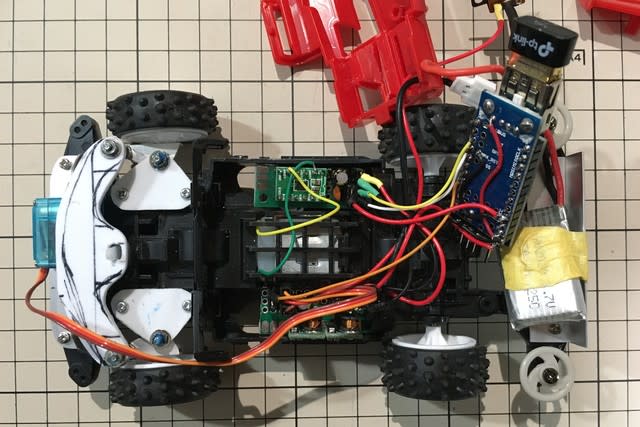
シャーシに仮固定。
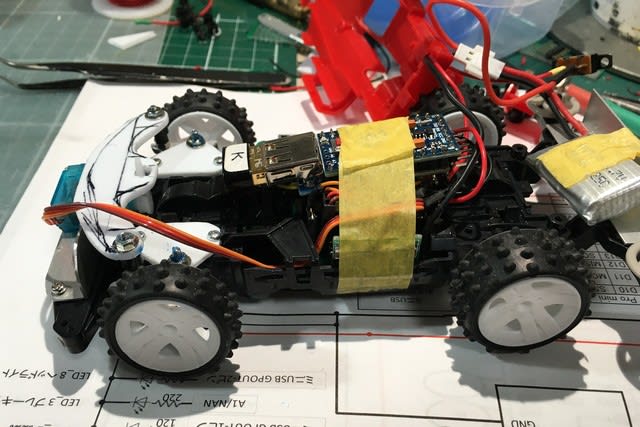
残念ながら、モータに近すぎてArduinoがコントロール不能になりました。
当然ですが、モータにはノイズ対策のコンデンサ(端子間および各端子とモータボデー間)は付けています。
この程度離すと良いようです。
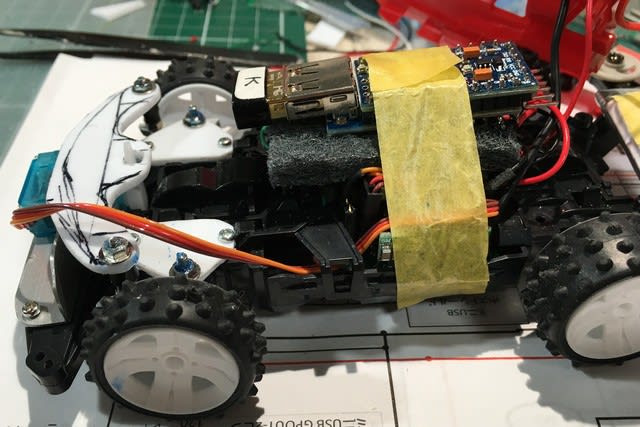
ボデーに手を入れて、1㎝程離してセットできるようにしました。

室内で走らせるには速すぎてコントロールしにくいです。
速いけどトルクが低いので、ギヤを増設してシフトダウンしたいのですが改造が大変なので見送りました。
次は塗装して完成までもっていきたいですね。