2021-06-30
ホイールにタイヤを履かせようとしたのですが、悲惨なことが起きてしまいました。
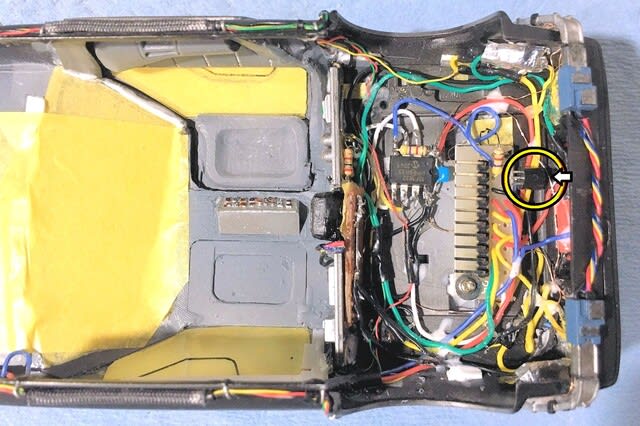
ホイールを動かすリンクシャフトの4本中2本が折れてしまったのです。
以前にも折れたことがありますが、この段階での破損は痛いです。
▼仕方ないので、0.4mmキリでシャフトに穴をあけ、0.4mmピアノ線を挿入して瞬着で接合します。
なんとか破損個所の修復を終え、仕上げに入ります。
▼今回、ドアミラー用に買ってしまいました。
使った結果は、このキットに限ってはアルミテープに比べてすごいというほどでもなかったです。
このシート、薄いので貼りにくいですが、密着性は良いです。
▼細かなやり残しを片付けて、ボデーを結合します。
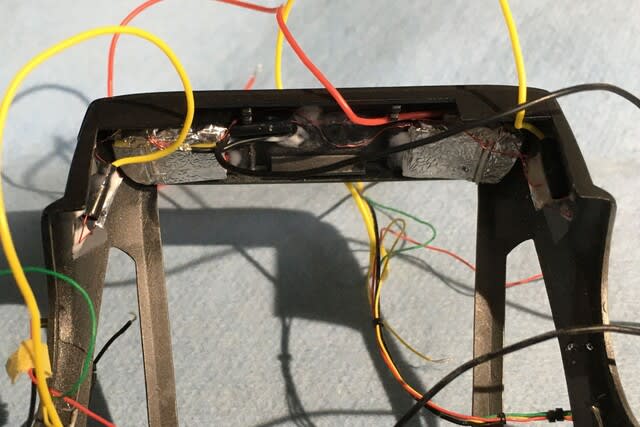
と、したのですが、「バキッ」、嫌な音がしました。
リンクアームがまた折れました。
心も折れそうです。
同じシャフトで3度目の破損です。
今度は1mm真鍮パイプと0.4mmピアノ線でつなぎます。
修復して、慎重にボデーを上下結合して、完成としました。
カーモデルなのに所々傷、汚れがあったりしています。
多分、洗車もしていないだろうし、彼方此方傷つけているという勝手な解釈です。
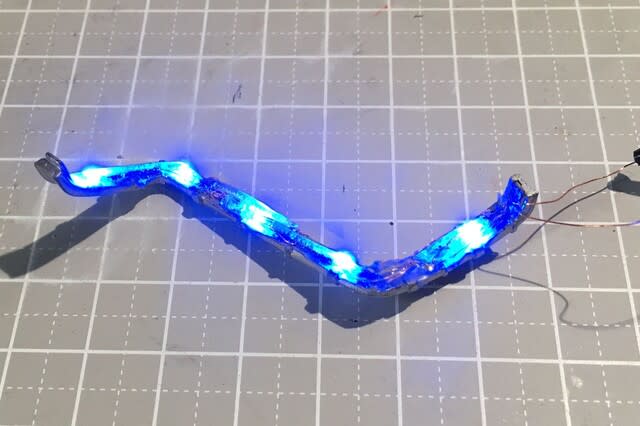
▼完成画像







▼今回も動画に残しました。
電飾&モータライズ アオシマ デロリアンⅡ