2002-05-29
前回、ArduinoでコントロールしていたものをM5Stamp PICOに換装する検討をしました。
結果、出力端子が足りないことも有って、RCカーで実現させました。
I2Cモータドライバを使用したり、子機と通信して対応すれば良さそうですが。。。。
今回はM5の親方に当たるESP32でRC可動戦車のコントロールを検討してみます。
プログラミングは使い慣れたArduino IDEを使用します。
利用できないライブラリーも有りますが、かなりの点でこれまで作ったスケッチが再利用できます。
▼画像上がESP32 Dev Modele、下がM5Stamp picoです。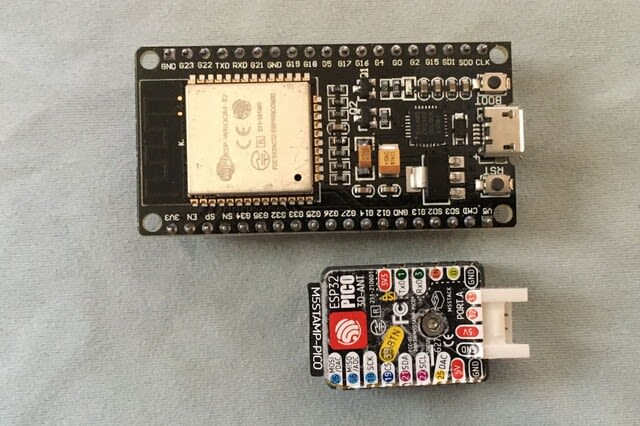
▼ESP32をArduino IDEで使うための環境設定は他のブログなどを参照するとして、
ボードの設定は下記のとおりです。(細かな設定は変更していません)
▼ESP32にDCモータ2個、MP3プレーヤ、サーボモータ3個(1個は連続回転改造済み)を接続しています。
基板上にはDRV8835モータドライバ(秋月電子)、4個のLED、スイッチ、5V出力昇圧コンバータをセットしています。
電源は3.7v LiPoバッテリです。
MP3プレーヤはJQ6500を使っています。(スケッチは変更要ですがDFPlayer miniでも動作確認済みです)
ESP32 Dev ModuleでRC可動戦車コントロール
▼回路図
画像をクリックすると拡大します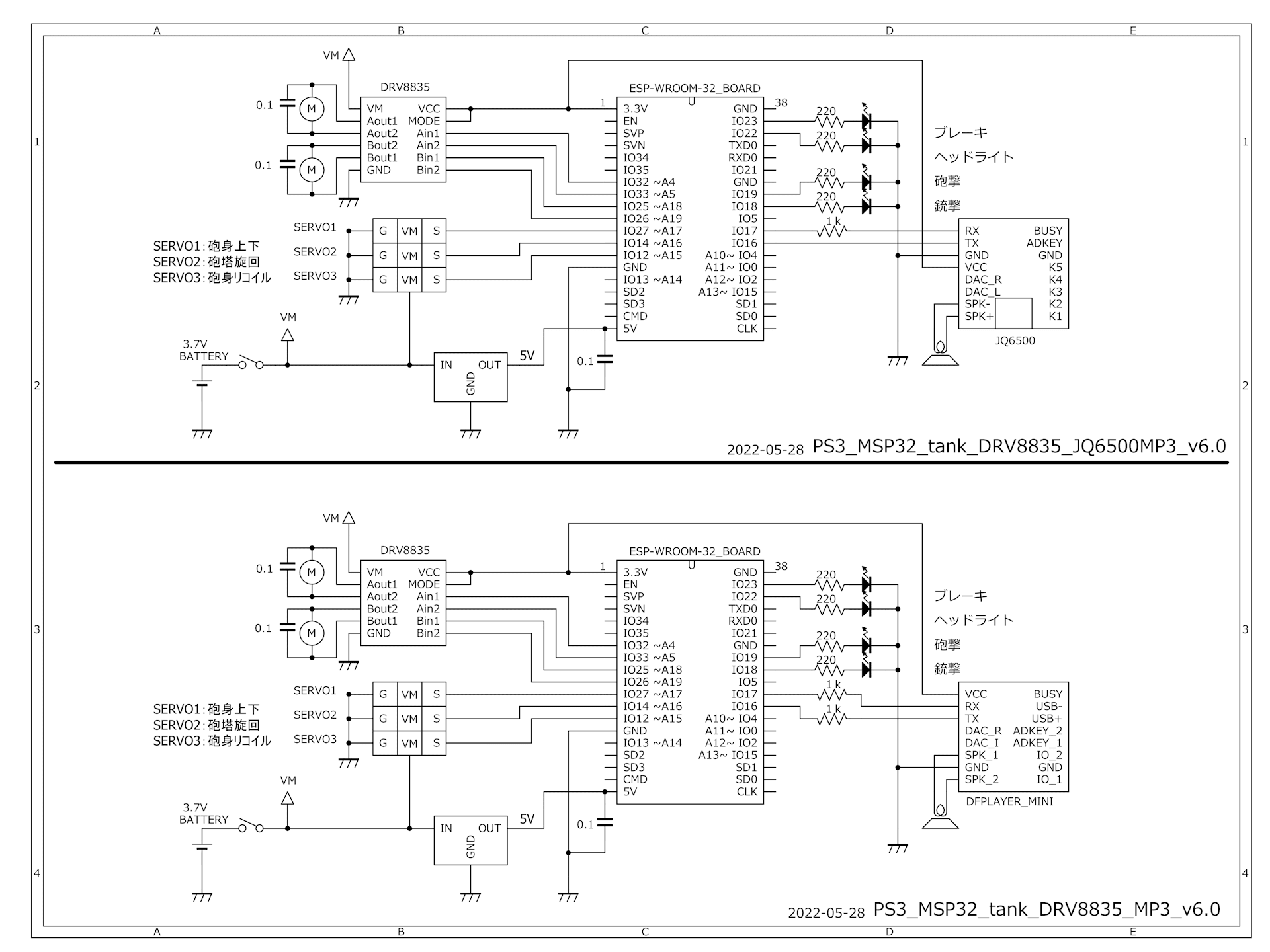
▼スケッチ
- /*PS3_ESP32_tank_JQ6500mp3_DRV8835_v6.0
- 2022-05-28
- */
- #include <Arduino.h> // Arduino ヘッダインクルード
- #include <JQ6500_Serial.h>
- HardwareSerial Serial_df(2); // use HardwareSerial UART2 (16pin=RX, 17pin=TX)
- JQ6500_Serial mp3(Serial_df);
- void printDetail(uint8_t type, int value);
- #include <Ps3Controller.h>
- #include <ESP32Servo.h>
- Servo servo1; // create four servo objects
- int servo1Pin = 27;
- Servo servo2;
- int servo2Pin = 14;
- Servo servo3;
- int servo3Pin = 12;
- int LED_1 = 23; //ブレーキランプ
- int LED_2 = 22; //ヘッドライト
- int LED_3 = 19; //砲撃
- int LED_4 = 18; //銃撃
- int k = 0;
- int s = 0;
- int d_time = 100;
- int angle_servo1 = 90; // 上下
- int anglenow = angle_servo1 ;
- int angle_servo3 = 90; // リコイル
- int motor_speed;
- float steering;
- int pos_y;
- int pos_x;
- int pos_lx;
- int AIN1 = 32; // A入力1/APHASE 左モータ AIN1
- int BIN1 = 25; // B入力1/BPHASE 右モータ BIN1
- int PWMApin = 33; //A5; // A入力2/AENABLE 左モータ AIN2 IO33 A5
- int PWMBpin = 26; //A19; // B入力2/BENABLE 右モータ BIN2 IO26 (IO0は起動時不安定)A19
- int PWMA = 2; //PWMAチャンネル 0=NG 1=NG 0〜15
- int PWMB = 3; //PWMBチャンネル 0=NG 1=NG 0〜15
- void setup() {
- servo1.setPeriodHertz(50);
- servo1.attach(servo1Pin, 500, 2400);
- servo2.setPeriodHertz(50);
- servo2.attach(servo2Pin, 900, 2100);
- servo3.setPeriodHertz(50);
- servo3.attach(servo3Pin, 500, 2400);
- Serial.begin(115200);
- Serial_df.begin(9600); // RX2 = 16, TX2 = 17
- mp3.reset();
- mp3.setVolume(22);
- Ps3.begin("00:11:22:33:44:55"); //SixaxisPairToolで調べたmac adresに修正
- Serial.println("PS3 Ready");
- ledcSetup(PWMA, 12000, 8); //チャンネル,周波数,解像度(8bit=256段階)
- ledcAttachPin(PWMApin, PWMA); //ledPinをPWMCHチャンネルに接続
- ledcSetup(PWMB, 12000, 8); //チャンネル,周波数,解像度(8bit=256段階)
- ledcAttachPin(PWMBpin, PWMB); //ledPinをPWMCHチャンネルに接続
- pinMode(AIN1, OUTPUT);
- pinMode(BIN1, OUTPUT);
- pinMode(LED_1, OUTPUT);
- pinMode(LED_2, OUTPUT);
- pinMode(LED_3, OUTPUT);
- pinMode(LED_4, OUTPUT);
- LEDtenmetsu(LED_2);
- servo1.write(angle_servo1); // 0 - 180
- delay(100);
- servo2.write(90); // 0 - 180
- delay(100);
- servo3.write(angle_servo3); // 0 - 180
- delay(100);
- mp3.playFileByIndexNumber(3);
- delay(2000);
- }
- void loop() {
- if (Ps3.isConnected()) {
- pos_lx = Ps3.data.analog.stick.lx;
- pos_lx = pos_lx + 128;
- //砲塔旋回
- if ( pos_lx > 230) { //右旋回
- servo2.write(80);
- } else if (pos_lx //左旋回
- servo2.write(100);
- } else { //停止
- servo2.write(90);
- }
- //砲身上下
- if ( Ps3.event.button_down.square) { // center
- if (anglenow > 90) {
- for (anglenow = anglenow; anglenow >= 90; anglenow -= 1) {
- servo1.write(anglenow);
- delay(40);
- }
- }
- else {
- for (anglenow = anglenow; anglenow <= 90; anglenow += 1) {
- servo1.write(anglenow);
- delay(40);
- }
- }
- }
- if ( Ps3.event.button_down.triangle) { // up
- for (anglenow = anglenow; anglenow <= 135; anglenow += 1 ) {
- servo1.write(anglenow);
- delay(40);
- }
- //delay(100);
- }
- if ( Ps3.event.button_down.cross) { // down
- for (anglenow = anglenow; anglenow >= 45; anglenow -= 1 ) {
- servo1.write(anglenow);
- delay(40);
- }
- }
- if (Ps3.event.button_down.circle) {
- if (s == 0) {
- s = 1;
- //myDFPlayer.play(3); //エンジン始動
- mp3.playFileByIndexNumber(3);
- delay(2000);
- //myDFPlayer.loop(5); //Loop 5th mp3 アイドリング
- mp3.playFileByIndexNumber(5);
- mp3.setLoopMode(MP3_LOOP_ONE);
- delay(d_time);
- } else {
- mp3.setLoopMode(MP3_LOOP_ONE_STOP);
- s = 0;
- delay(500);
- }
- }
- if (Ps3.event.button_down.r3) {
- mp3.setLoopMode(MP3_LOOP_ONE_STOP);
- s = 0;
- }
- if (Ps3.event.button_down.right) {
- digitalWrite(LED_2, HIGH); // Headlight ON
- }
- if (Ps3.event.button_down.left) {
- digitalWrite(LED_2, LOW); // Headlight off
- }
- if (Ps3.event.button_down.r1) { //砲撃 + リコイル(砲身&車体)
- digitalWrite(LED_3, HIGH); //主砲発光
- //myDFPlayer.play(26);
- mp3.playFileByIndexNumber(26);
- delay(50);
- servo3.write(angle_servo3 - 30); // 砲身リコイル
- delay(20);
- motor_run(180, 1, 180, 1, 1); // 車体リコイル
- delay(80);
- motor_run(0, 0, 0, 0, 1);
- digitalWrite(LED_3, LOW);
- for (int ang3 = (angle_servo3 - 30); ang3 <= angle_servo3; ang3 += 1 ) {
- servo3.write(ang3);
- delay(20);
- }
- motor_run(60, 0, 60, 0, 1);
- delay(290);
- motor_run(0, 0, 0, 0, 1);
- delay(100);
- if (s == 1) {
- mp3.playFileByIndexNumber(5);
- mp3.setLoopMode(MP3_LOOP_ONE);
- delay(d_time);
- }
- }
- if (Ps3.event.button_down.l1) { //銃撃
- mp3.playFileByIndexNumber(24);
- for ( k = 0; k
- digitalWrite(LED_4, HIGH); //発光
- delay(80);
- digitalWrite(LED_4, LOW);
- delay(120);
- }
- if (s == 1) {
- mp3.playFileByIndexNumber(5);
- mp3.setLoopMode(MP3_LOOP_ONE);
- delay(d_time);
- }
- }
- //走行コントロール
- pos_y = Ps3.data.analog.stick.ly;
- pos_x = Ps3.data.analog.stick.rx;
- pos_y = pos_y + 128;
- pos_x = pos_x + 128;
- //前進
- if (pos_y <= 102 && pos_x >= 102 && pos_x <= 152) {
- motor_speed = map(pos_y, 102, 0, 0, 255);
- motor_run(motor_speed, 0, motor_speed, 0, 0);
- }
- //後進
- else if ( pos_y >= 152 && pos_x >= 102 && pos_x <= 152) {
- motor_speed = map(pos_y, 152, 255, 0, 255) ;
- motor_run(motor_speed, 1, motor_speed, 1, 0);
- }
- //前進右緩旋回、信地旋回
- //else if ( pos_y <= 102 && pos_x > 152 && pos_x <= 245) {
- else if ( pos_y <= 102 && pos_x >= 152) {
- motor_speed = map(pos_y, 102, 0, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 152, 255, 0, 255) / 255.00));
- motor_run(motor_speed, 0, steering, 0, 0);
- }
- //前進左緩旋回、信地旋回
- //else if ( pos_y <= 102 && pos_x < 102 && pos_x >= 10) {
- else if ( pos_y <= 102 && pos_x <= 102) {
- motor_speed = map(pos_y, 102, 0, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 102, 0, 0, 255) / 255.00));
- motor_run(steering, 0, motor_speed, 0, 0);
- }
- //後進右緩旋回、信地旋回
- //else if ( pos_y >= 152 && pos_x > 152 && pos_x <= 245) {
- else if ( pos_y >= 152 && pos_x >= 152 ) {
- motor_speed = map(pos_y, 152, 255, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 152, 255, 0, 255) / 255.00));
- motor_run(motor_speed, 1, steering, 1, 0);
- }
- //後進左緩旋回、信地旋回
- //else if ( pos_y >= 152 && pos_x < 102 && pos_x >= 10) {
- else if ( pos_y >= 152 && pos_x <= 102 ) {
- motor_speed = map(pos_y, 152, 255, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_x, 102, 0, 0, 255) / 255.00));
- motor_run(steering, 1, motor_speed, 1, 0);
- }
- //右超信地旋回
- else if (pos_x >= 245 && pos_y >= 102 && pos_y <= 152) {
- motor_speed = 204;
- motor_run(motor_speed, 0, motor_speed, 1, 0);
- }
- //左超信地旋回
- else if (pos_x <= 10 && pos_y >= 102 && pos_y <= 152) {
- motor_speed = 204;
- motor_run(motor_speed, 1, motor_speed, 0, 0);
- }
- else { //停止(ブレーキ)
- motor_run(0, 0, 0, 0, 1);
- }
- }
- }
- void motor_run(int D0, int D1, int D2, int D3, int D4) {
- ledcWrite(PWMA, D0); //(チャンネル,解像度)
- digitalWrite(AIN1, D1);
- //analogWrite(PWMB, D2);
- ledcWrite(PWMB, D2); //(チャンネル,解像度)
- digitalWrite(BIN1, D3);
- digitalWrite(LED_1, D4);
- }
- void LEDtenmetsu(int LED) {
- for (int i = 0; i
- digitalWrite(LED, HIGH);
- delay(500);
- digitalWrite(LED, LOW);
- delay(500);
- }
- }
 |
WayinTop ESP32開発ボード Wi-Fi + BLEモジュール ESP-WROOM-32実装済み デュアルコア 技適取得済み 2個...
ESP-WROOM-32が実装されているWi-Fi + BLE開発用ボードです。AP、STA、AP + STAの3モードをサポートしま...
WayinTop
|
▼私が購入した物(VKLSVAN 2個セット JQ6500:現在在庫切れ)ではないですが。。。。
 |
Ren He 2個セット JQ6500 音声モジュール 基板 MCU 5チャンネル シリアル制御 サウンドモジュール 音声...
JQ6500はMP3、完全に統合されたMP3、WMVハードデコードを提供するシリアルチップです。電源は3.2V-5V、4...
Ren He
|