2019-01-09
昨年完成していたタイガーⅠをArduino+PS3版に改修します。

改修理由は機能アップです。
砲身上下可動と発光、機銃発光、ヘッドライト点滅、テールランプ点灯、そして速度可変、旋回のコントロールの操作性アップです。

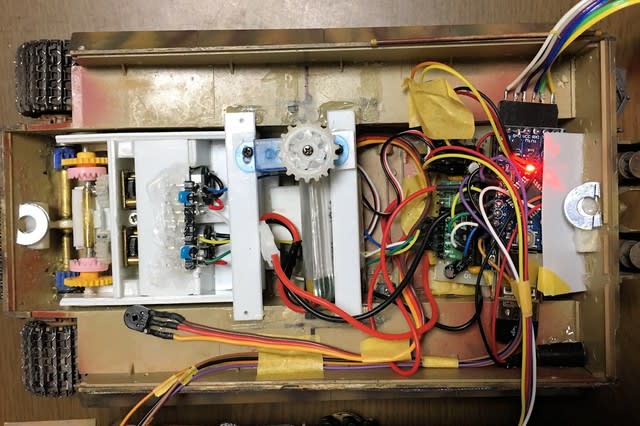

先に、この仕様で製作したT34/85より内部が広いのでユニット搭載は楽です。
使用するArduinoはPro MIni 5V 16MHzです。
Nanoに比べてUSBポートが無いので短いです。
更にミニUSBホストシールドがPro Mini専用なので接続が楽です。

しかし、このミニUSBホストシールドにはVBUS以外は5Vをかけてはいけないとの事です。
とは言え、Nanoとの接続も何とか使えているので、Vccには3.3Vを印可して凌ぐことにします。
(電源は3.7Vリポバッテリなので、3.3Vはダイオードを1個介して接続します。)
換装を進める中で、サーボモータSG90を接続すると電源が落ちます。
小型のRC450の接続では大丈夫そうなので、原因を確定できていませんがRC450で進めます。
モータドライバはDRV8835を使います。
前回、上手く使いこなせかったのですが、何とか速度制御もできるようにスケッチを見直しました。
TB6612よりコンパクトで接続も2本少なくできるので助かります。
赤外線発光LEDはトランジスタを入れて出力アップしました。(射程距離アップです)
スケッチはタイガーⅠ用にカスタマイズします。
走行速度、サーボの可動範囲、回転方向などメカとのマッチングをスケッチ側で調整しました。
記録のためにスケッチと回路図を残します。
(規定以外での使用をしているところもありますので注意が必要です。)
- /* PS3BT_arduino_pro mini_tank_DRX8835_IRw_TIGER1specS
- モータドライバはDRX8835
- 砲撃時のリコイルアクション
- irremote PIN3 赤外線発光(砲撃)システム
- A0ピンに赤外線受光モジュール出力を接続し、被弾処理を追加
- 主砲発光はA1を使用
- IRremote Ver.0.1
- Arduino 1.8.7
- */
- #include <SoftwareSerial.h>
- #include <DFPlayer_Mini_Mp3.h>
- SoftwareSerial mySerial(A2, A3); // DFPlayer TX,RX
-
- #include <PS3BT.h>
- #include <usbhub.h>
- #ifdef dobogusinclude
- #include <spi4teensy3.h>
- #endif
- //#include <Usb.h> // needed by Arduino IDE
- #include <USB_Host_Shield_GPIO.h> // GPOUTピンで主砲LEDを発光させるため
- MaxGPIO max;
-
- USB Usb;
- BTD Btd(&Usb);
- PS3BT PS3(&Btd);
- //PS3BT PS3(&Btd, 0x00, 0x1B, 0xDC, 0xF2, 0x54, 0x32); //for Dongke A
- /*シリアルモニタにBluetooth DongleのアドレスがSerial.printされる。
- 書き出された6個のコードをスケッチを変更し、
- ドングルを指した状態でArduinoに書き込む(電源は切らない)
- ドングルを抜いてUSBケーブルでPS3コントローラを接続する(電源は切らない)
- ケーブルを抜いてドングルを指し直す(Arduinoを再起動する)
- PS3コントローラのPS ボタンを押してペアリングする。
- */
-
- #include <IRremote.h>
- IRsend irsend;
- int RECV_PIN = A0 ; //赤外線受光部をPIN A0に
- IRrecv irrecv(RECV_PIN);
- decode_results results; //受信信号を格納する
- const long sign_hit = 0x4CB0FADD;
- int cnt = 0 ;
-
- #include <VarSpeedServo.h>
- VarSpeedServo myservo;
- VarSpeedServo myservo_1;
- int servo_pos = 50;
- const int servo_sp = 10;
- const int servo1_sp = 1;
- int ch = 0;
- int pos_y;
- int pos_x;
- int pos_ry;
- int pos_rx;
- int motor_speed;
- int PWMA = 5; // A入力2/AENABLE 左モータ AIN2
- int PWMB = 6; // B入力2/BENABLE 右モータ BIN2
- int AIN1 = 4; // A入力1/APHASE 左モータ AIN1
- int BIN1 = 7; // B入力1/BPHASE 右モータ BIN1
- //const int LED_1 = A2; //主砲
- const int LED_2 = 2; //機銃
- const int LED_3 = A1 ; //ブレーキランプ
- const int LED_8 = 8 ; //ヘッドライト
- const int SVCH1 = A4; //servo 1
- const int SVCH2 = A5; //servo 2
-
- void setup() {
- irrecv.enableIRIn(); // Start the receiver
- pinMode(RECV_PIN, INPUT) ; // 赤外線受信モジュールに接続ピンをデジタル入力に設定
- pinMode(PWMA, OUTPUT);
- pinMode(PWMB, OUTPUT);
- pinMode(AIN1, OUTPUT);
- pinMode(BIN1, OUTPUT);
- pinMode(LED_2, OUTPUT);
- pinMode(LED_3, OUTPUT);
- pinMode(LED_8, OUTPUT);
- pinMode(SVCH1, OUTPUT);
- pinMode(SVCH2, OUTPUT);
- myservo.attach(SVCH1); //servo1 砲身上下
- myservo.write(servo_pos);
- myservo_1.attach(SVCH2); //servo2 砲塔旋回
- myservo_1.write(90);
- myservo_1.detach();
-
- Serial.begin (115200);
- mySerial.begin (9600);
- mp3_set_serial (mySerial); //set softwareSerial for DFPlayer-mini mp3 module
- mp3_set_volume (25); //max=30
-
- while (!Serial); // Wait for serial port to connect - used on Leonardo, Teensy and other boards with built-in USB CDC serial connection
- if (Usb.Init() == -1) {
- Serial.print(F("\r\nOSC did not start"));
- while (1); //halt
- }
- Serial.print(F("\r\nPS3 Bluetooth Library Started"));
-
- }
-
- void loop() {
- Usb.Task();
- if (irrecv.decode(&results)) { // 受信コードの値が
- if (results.value == sign_hit) { // 0x4CB0FADDだったら被弾
- //Serial.println("HIT!");
- Hit();
- }
- irrecv.resume();
- }
-
- if (PS3.PS3Connected) {
-
- pos_ry = PS3.getAnalogHat(RightHatY);
-
- if (pos_ry < 10 && servo_pos < 100 ) { // UP
- //if (pos_ry > 235 && servo_pos < 179 ) { // UP
- servo_pos++;
- myservo.write(servo_pos, servo_sp, true);
-
- } else if (pos_ry > 245 && servo_pos > 35 ) { //DOWN
- servo_pos--;
- myservo.write(servo_pos, servo_sp, true);
-
- } else if (PS3.getButtonClick(SQUARE)) { //CENTER
- servo_pos = 50;
- myservo.write(servo_pos, servo_sp, true);
- }
-
- //砲塔旋回
- pos_rx = PS3.getAnalogHat(RightHatX);
- if (pos_rx > 245) { //右旋回
- myservo_1.attach(SVCH2); //servo2 砲塔旋回
- myservo_1.write(180, servo1_sp);
- } else if (pos_rx < 10) { //左旋回
- myservo_1.attach(SVCH2); //servo2 砲塔旋回
- myservo_1.write(0, servo1_sp);
- } else { //停止
- myservo_1.write(90, 255);
- myservo_1.detach();
- }
-
- //砲撃 + リコイル
- if (PS3.getButtonClick(R1) && ch == 0 ) {
- int khz = 38; // 38kHz carrier frequency for the NEC protocol
- unsigned int irSignal[] = {4100, 1000, 2050, 2050, 1000}; // vs BATTLE TANK jr T-72 40MHz
- // AnalysIR Batch Export (IRremote) - RAW
- irsend.sendRaw(irSignal, (sizeof(irSignal) / sizeof(irSignal[0])), khz);
- //irsend.sendRaw(data buf, length, hertz)
- irrecv.enableIRIn(); // 受信を再開する
- mp3_play(15);
- max.write(0, HIGH); //主砲発光
- //delay(220);
- motor_run(200, 1, 200, 1, 1);
- ch = 5000; //約2秒間は砲撃不可
- delay(80);
- motor_run(0, 0, 0, 0, 1);
- delay(60);
- max.write(0, LOW); //主砲消灯
- motor_run(100, 0, 100, 0, 1);
- delay(200);
- motor_run(0, 0, 0, 0, 1);
- delay(140);
- } else {
- if (ch > 0) {
- ch--;
- }
- }
-
- //銃撃
- if ( PS3.getButtonClick(L1)) {
- mp3_play(10);
- for ( int i = 0; i < 5 ; i++) {
- digitalWrite(LED_2, HIGH);
- delay(80);
- digitalWrite(LED_2, LOW);
- delay(120);
- }
- }
-
- //ヘッドライト
- if (PS3.getButtonClick(RIGHT)) { //点灯
- digitalWrite(LED_8, HIGH);
- }
-
- if (PS3.getButtonClick(LEFT)) { //消灯
- digitalWrite(LED_8, LOW);
- }
-
- //走行コントロール
- pos_y = PS3.getAnalogHat(LeftHatY);
- pos_x = PS3.getAnalogHat(LeftHatX);
-
- //左スティックがセンター付近は停止(ブレーキ)
- if (pos_x >= 117 && pos_x <= 137 && pos_y >= 117 && pos_y <= 137) {
- motor_run(0, 0, 0, 0, 1);
- }
-
- //前進
- else if (pos_y < 117 && pos_x > 117 && pos_x < 137) {
- //左スティック中央(127)から最上部(0)の値をモーターのスピード0から255に変換
- motor_speed = map(pos_y, 117, 0, 0, 255);
- motor_run(motor_speed, 0, motor_speed, 0, 0);
- }
-
- //後進
- else if ( pos_y > 137 && pos_x > 117 && pos_x < 137) {
- motor_speed = map(pos_y, 137, 255, 0, 255) ;
- motor_run(motor_speed, 1, motor_speed, 1, 0);
- }
-
- //前進右旋回
- else if ( pos_y < 117 && pos_x > 137) {
- motor_speed = map(pos_y, 117, 0, 0, 255);
- motor_run(motor_speed, 0, 0, 0, 0);
- }
-
- //前進左旋回
- else if ( pos_y < 117 && pos_x < 117) {
- motor_speed = map(pos_y, 117, 0, 0, 255);
- motor_run(0, 0, motor_speed, 0, 0);
- }
-
- //後進右旋回
- else if ( pos_y > 137 && pos_x > 137) {
- motor_speed = map(pos_y, 137, 255, 0, 255);
- motor_run(motor_speed, 1, 0, 0, 0);
- }
-
- //後進左旋回
- else if ( pos_y > 137 && pos_x < 117) {
- motor_speed = map(pos_y, 137, 255, 0, 255);
- motor_run(0, 0, motor_speed, 1, 0);
- }
-
- //右超信地旋回
- else if ( pos_y > 117 && pos_y < 137 && pos_x > 137) {
- motor_speed = map(pos_x, 137, 255, 0, 255);
- motor_run(motor_speed, 0, motor_speed, 1, 0);
- }
-
- //左超信地旋回
- else if ( pos_y > 117 && pos_y < 137 && pos_x < 117) {
- motor_speed = map(pos_x, 117, 0, 0, 255);
- motor_run(motor_speed, 1, motor_speed, 0, 0);
- }
- }
- }
-
- void motor_run(int D0, int D1, int D2, int D3, int D4) {
- /* D0 : モータスピード(左)
- D1 : モータA(左)1 = HIGH / 0 = LOW
- D2 : モータスピード(右)
- D3 : モータB(右)1 = HIGH / 0 = LOW
- D4 : LED_3 ON/OFF 1 = HIGH / 0 = LOW
- */
- analogWrite(PWMA, D0);
- digitalWrite(AIN1, D1);
- analogWrite(PWMB, D2);
- digitalWrite(BIN1, D3);
- digitalWrite(LED_3, D4);
- }
-
- // ====被弾====
- void Hit() {
- mp3_play(17);
- motor_run(255, 1, 255, 0, 0);
- delay(150);
- motor_run(0, 0, 0, 0, 1);
- delay(100);
- motor_run(200, 0, 200, 1, 0);
- delay(200);
- motor_run(0, 0, 0, 0, 1);
- delay(50);
- cnt++;
- if ( cnt >= 5 ) {
- motor_run(0, 0, 0, 0, 0);
- mp3_play(18);
- for ( int i = 0; i < 15 ; i++) {
- digitalWrite(LED_8, HIGH);//ヘッドライト点灯
- delay(1000);
- digitalWrite(LED_8, LOW);//ヘッドライト消灯
- delay(1000);
- }
- //delay(30000); //復活までに30秒
- cnt = 0;
- } else {
- delay(1000);
- }
- }