








12月3日に地球スイングバイを行った小惑星探査機“はやぶさ2”。
今回、軌道の計測と計算が完了し、
目標の軌道を順調に飛行していることが確認されたんですねー

地球の重力と公転速度を利用
12月3日に“はやぶさ2”は地球スイングバイを実施しました。
地球スイングバイとは、
地球の重力を利用して軌道の変更を行い、
その際に地球の公転速度を利用することで探査機の航行速度を上げる、
航法テクニックのこと。
“はやぶさ2”は日本時間の19時8分7秒ごろに地球に最接近して、
ハワイ付近の上空3090キロを通過しています。
そして、JAXAが行ったスイングバイ後の軌道計測と計算では、
目標としていた軌道上を航行していることを確認。
“はやぶさ2”は軌道を約80度曲げ、
スピードは秒速約1.6キロ上げて秒速約31.9キロになり、
目標としていた数値を達成したそうです。
スングバイにより軌道を大きく曲げるとともに速度を上げた“はやぶさ2”。
地球を離れて探査目標の“リュウグウ”に向かう軌道進むことになります。
約3億キロ離れた“リュウグウ”への到着は、
2年半後の2018年6月~7月ごろになる予定です。
着陸地点を決めるカメラ
“はやぶさ2”は地球スイングバイ後に、
光学航法望遠カメラ“ONC-T”使用して地球を撮影していました。
このカメラでは7つのフィルターを使ってカラー画像を取得することができ、
このうち3色の画像を使って作成したのが、この地球の画像になるんですねー
“ONC-T”は、物による反射の性質の違いを認識することができます。
“はやぶさ2”は、この機能を利用して、
小惑星“リュウグウ”のどこに有機物や含水鉱物があるのかを確認し、
着陸する場所を決めることになります。
この“ONC-T”の性能を活かして、
2色の画像から植物の存在を示す場所を明るく表示した画像や、
氷と雲で反射の性質が異なる2色を使い、雲を白く、氷を青く表示し、
同じ色に見える雲と南極の氷を見分けるようにした画像も作成されています。
事前に試験は行われていたのですが、
今回の地球観測で、しっかりとその性能が発揮されていることが、
確認できたそうですよ。
こちらの記事もどうぞ ⇒ 地球スイングバイに向けて軌道修正に成功! “はやぶさ2”は順調に飛行
今回、軌道の計測と計算が完了し、
目標の軌道を順調に飛行していることが確認されたんですねー
地球の重力と公転速度を利用
12月3日に“はやぶさ2”は地球スイングバイを実施しました。
地球スイングバイとは、
地球の重力を利用して軌道の変更を行い、
その際に地球の公転速度を利用することで探査機の航行速度を上げる、
航法テクニックのこと。
“はやぶさ2”は日本時間の19時8分7秒ごろに地球に最接近して、
ハワイ付近の上空3090キロを通過しています。
そして、JAXAが行ったスイングバイ後の軌道計測と計算では、
目標としていた軌道上を航行していることを確認。
“はやぶさ2”は軌道を約80度曲げ、
スピードは秒速約1.6キロ上げて秒速約31.9キロになり、
目標としていた数値を達成したそうです。
スングバイにより軌道を大きく曲げるとともに速度を上げた“はやぶさ2”。
地球を離れて探査目標の“リュウグウ”に向かう軌道進むことになります。
約3億キロ離れた“リュウグウ”への到着は、
2年半後の2018年6月~7月ごろになる予定です。
着陸地点を決めるカメラ
“はやぶさ2”は地球スイングバイ後に、
光学航法望遠カメラ“ONC-T”使用して地球を撮影していました。
このカメラでは7つのフィルターを使ってカラー画像を取得することができ、
このうち3色の画像を使って作成したのが、この地球の画像になるんですねー
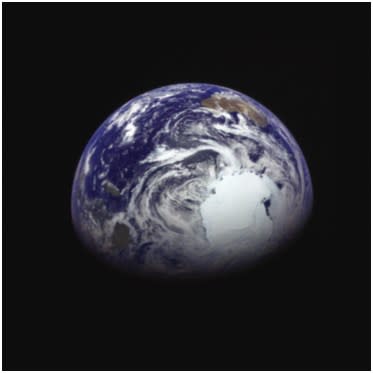 |
| スイングバイ翌日の12月4日13時9分(日本時間)に、 約34万キロの距離から撮影された地球。 画像右上にオーストラリア大陸、右下に南極大陸が見えている。 |
“ONC-T”は、物による反射の性質の違いを認識することができます。
“はやぶさ2”は、この機能を利用して、
小惑星“リュウグウ”のどこに有機物や含水鉱物があるのかを確認し、
着陸する場所を決めることになります。
この“ONC-T”の性能を活かして、
2色の画像から植物の存在を示す場所を明るく表示した画像や、
氷と雲で反射の性質が異なる2色を使い、雲を白く、氷を青く表示し、
同じ色に見える雲と南極の氷を見分けるようにした画像も作成されています。
事前に試験は行われていたのですが、
今回の地球観測で、しっかりとその性能が発揮されていることが、
確認できたそうですよ。
こちらの記事もどうぞ ⇒ 地球スイングバイに向けて軌道修正に成功! “はやぶさ2”は順調に飛行