








 |
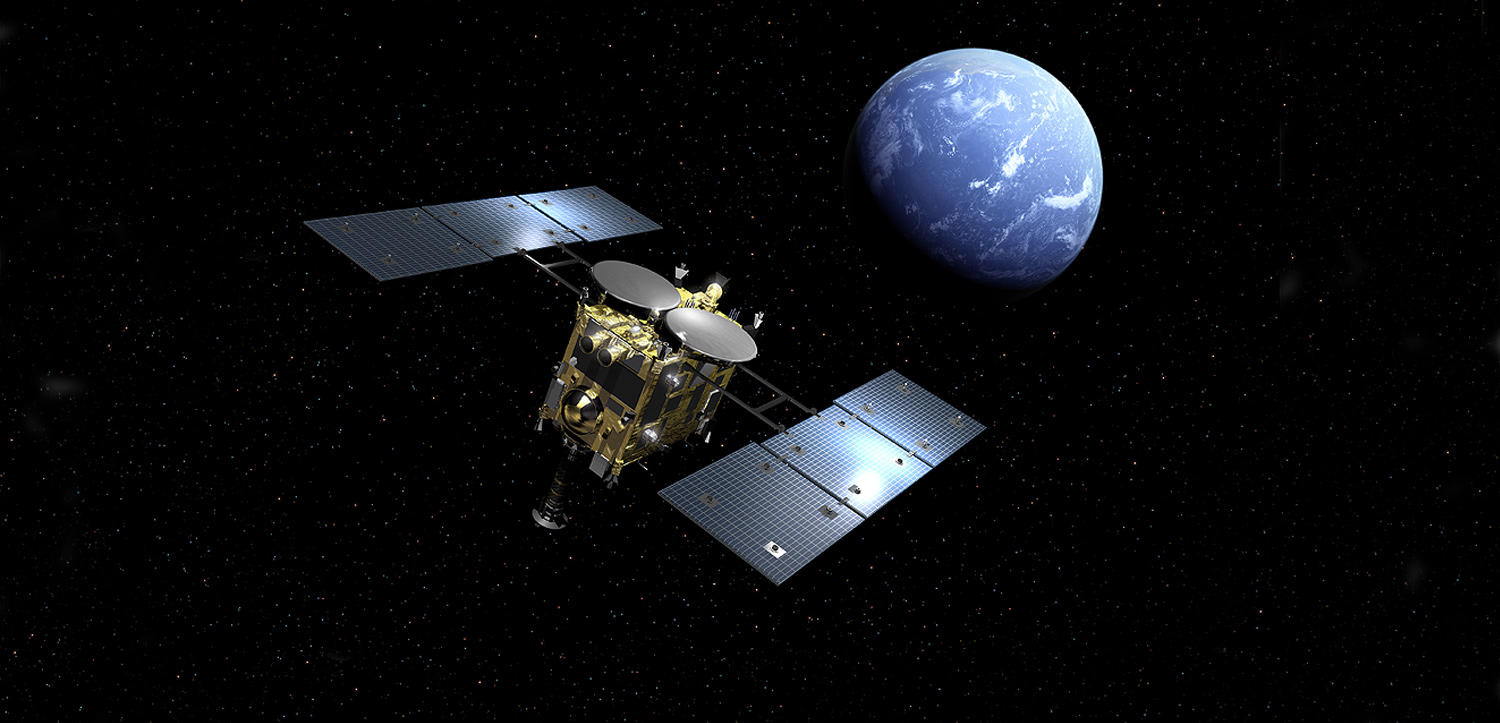
地球を出発して4年も航海を続けてきたJAXAの小惑星探査機“はやぶさ2”。
2月22日の朝8時頃に小惑星リュウグウに着陸することが決まったんですねー
岩の少ない地点に確実に着陸するため採用されたのは、先代“はやぶさ”とは違う誘導方法でした。
サンプルの採取は、表面に数秒間接地して行われるようです。
水や有機物が多く存在する小惑星の探査
2003年に打ち上げられ小惑星イトカワの探査を行い、そして2010年に地球へのサンプルリターンを成功させた探査機“はやぶさ”。
その“はやぶさ”の後継機として、2014年12月3日に種子島宇宙センターからH-IIAロケット26号機で打ち上げられた探査機が“はやぶさ2”です。
“はやぶさ2”のミッションは、搭載された観測機器を使って小惑星の探査を行い、砂などのサンプルを採取して地球に持ち帰ること。
観測データや、持ち帰ってきたサンプルを地球上で分析し、“はやぶさ”や他の小惑星・彗星探査機が得たデータと比較することで、太陽系の起源や進化、生命の原材料を探求することを目指しているんですねー
目的地のリュウグウと呼ばれる小惑星は、有機物や含水鉱物をより多く含んでいると考えられている“C型”という種類の小惑星です。
先代の“はやぶさ”が探査した“S型”小惑星イトカワと比べ、より始原的な天体になります。
赤外線天文衛星“あかり”が実現した、探査に行かなくても小惑星に水が存在するかを知る方法
岩が少ない場所への安全な着陸方法
小惑星リュウグウへの第1回タッチダウン(TD1)に向けて、探査機の運用チームでは候補地を慎重に検討してきました。
それは、岩が多くあるリュウグウの表面に“はやぶさ2”を安全に着陸させるためでした。
1月の段階で絞られていた候補地は、リュウグウの赤道部分にある“L08-B1”と“L08-E1”という2つの地域。
そして、最終検討で決まったのが、10月の着陸リハーサルで投下したターゲットマーカーに近く、岩がより少ない“L08-E1”への着陸でした。
広さは“はやぶさ2”の太陽電池パネルの幅とほぼ同じ直径6メートルほどあるようです。
 |
| “はやぶさ2”の着陸地点。 ピンクの正方形“L08”の中にある赤い四角形が最終的に決まった着陸地点“L08-E1”。 |
この方法は、すでにリュウグウ表面に投下済みのターゲットマーカーをカメラの視野内に捕捉し続けることで、マーカーから指定の距離・方向にシフトした場所へ着陸するというもの。
当初予定されていたのは、着陸のための降下中にターゲットマーカーを投下して、落ちていくターゲットマーカーをカメラの視野中心にとらえ続けることで、マーカーの真上に着陸するという方法でした。
これは初代“はやぶさ”と同じ誘導方法です。
でも、この方法だと誘導精度がターゲットマーカーの投下の精度で決まってしまうので、±数メートルという高い誘導精度を実現するのは難しいんですねー
そこで採用されたのが、“ピンポイントタッチダウン”でした。
 |
| 着陸地点付近の拡大図。 当初最有力候補とされていた“L08-B”(白い円)の中にある着陸候補地“L08-B1”(赤)と、 そのそばにある着陸候補地“L08-E1”(緑)。赤やピンクの楕円が着陸の妨げになり得る岩塊。 左下は地図と同じ縮尺で描かれた“はやぶさ2”の機体。 “TM”は10月25日に投下したターゲットマーカー。 |
着陸は2月22日の8時15分ころ
現在の計画では、“はやぶさ2”は2月21日8時32分に高度20キロのホームポジションから降下を始め、翌22日の8時15分にリュウグウに着陸。
表面に数秒間接地してサンプルを採取してから上昇します。
 |
なので、この間は“はやぶさ2”の高利得アンテナ(HGA)は使えず、地球から探査機の状態や画像などを受信することができないんですねー
それでも、探査機の速度が変われば電波の波長がドップラー効果で変わることを利用すれば、探査機が下降から停止、上昇に転じたことは確認できるようです。
上昇後に高利得アンテナを再び地球に向け、第1回タッチダウンが計画通りに行えたかをデータで確認できるのは9時頃になるようですよ。
 |
| “はやぶさ2”のタッチダウンの流れ。高度45メートルまで降下したところでいったんホバリングして、 表面のターゲットマーカーをカメラで捕捉する。 補足できたら高度8.5メートルまで下降し、ここで探査機の姿勢を地形に合わせて傾ける。 そのままの姿勢でターゲットマーカーの真上から水平に移動して、 最後にスラスターを噴射して放物運動するように下降して着地する。 |
こちらの記事もどうぞ
打ち上げは今年の冬、小惑星探査機“はやぶさ2”が公開
