








JAXAは、2024年1月20日午前0:20(日本標準時)に小型月着陸実証機“SLIM(Smart Lander for Investigating Moon)”を月面面に着陸させ、地球との通信を確立。
“LEV(Lunar Excursion Vehicle)”と呼ばれる2機の小型プローブの放出に成功しています。
でも、着陸時の姿勢などが計画通りではなく、“SLIM”は太陽電池からの電力発生ができない状態に…
バッテリーが過放電して探査機を失うリスクを避けるため、同日午前2:57には地上からのコマンドにより電源をオフにしています。
ちなみに電源オフ時点でのバッテリー残量は12%だったそうです。
ただ、着陸後に地上との通信を確立できていること、太陽電池だけが損傷するような状況は考えにくいんですねー
これらの理由からJAXAが判断したのは、“SLIM”はソフトランディングに成功したものの、機体に固定されている太陽電池パネルの向きが想定とは違う方向を向くような姿勢になっていることでした。
JAXAでは、電源をオフにするまでに取得した各データを分析。
その結果、“SLIM”が当初の目標地点から東側に55メートル程度の位置で月面に到達していることが確認できました。
また、ピンポイント着陸性能を示す障害物回避マヌーバ(※1)開始前(高度50メートル付近)の位置精度としては、10メートル程度以下、おそらく3~4メートルと評価しています。
もちろん、データの詳細な評価は継続する必要があります。
でも、“SLIM”の主ミッション“100メートル精度のピンポイント着陸”の技術実証は達成できたと言えそうです。
また、接地直前には小型プローブ“LEV-1、LEV-2”の放出にも成功。
さらに、“SLIM”に搭載されたマルチバンド分光カメラ(MBC)についても、電源オフまでの間に試験的に動作し、撮像画像を取得しています。
片方のエンジンを失った状態での月面着陸
着陸直後から太陽電池の発生電力が得られない状況が確認されたので、JAXAではあらかじめ用意していた異常時対応手順を実施。
着陸から同日1時50分頃にかけて“SLIM”上のデータダウンロードや消費電力の削減を試み、1時50分~2時35分頃にマルチバンド分光カメラ(MBC)による月面の観測を行っています。
このダウンロードされた技術データの分析からは、太陽電池パネルが電力を発生しない姿勢で月面に接地した経緯も分かってきています。
原因は、高度50メートル時点で障害物回避マヌーバを開始する直前、“SLIM”に搭載された2基のメインエンジンうち1基の推力が失われたことにあるようです。
“SLIM”の着陸降下シーケンスは、2024年1月19日23時59分58秒に前半の動力降下フェーズが始まっています。
“SLIM”は、カメラで撮影したクレーターの分布を元に位置を把握する、画像照合航法を行いながら水平方向の速度を落としつつ、高度約15キロから約6.2キロまで降下していきます。
そして、後半の垂直降下フェーズに移行した“SLIM”は、高度約4000メートル及び約500メートルで画像照合を行い水平方向の位置を補正しつつ降下を継続(修正量はそれぞれ約100メートルと約50メートル)。
高度約50メートルでは画像を元にした月面の障害物検出が行われ、当初の予定から11.8メートル離れた地点を最終的な目標地点として降下が続けられました。
でも、高度約50メートルまで降下した1月20日0時19分18秒頃、突如“SLIM”に搭載されている2基のメインエンジンの合計発生推力が約55%まで低下。
着陸後の温度変化を調べた結果、片方のメインエンジン(-X側)に何らかの異常が発生したものと考えられています。
同時刻に“SLIM”の航法カメラで撮影された画像にはノズルと見られる物体が写り込んでいたので、ノズル部が破断した結果としてこのメインエンジンの推力が大部分失われたと見られています(実際に何が起こったのかは調査中)。
“SLIM”の垂直方向に対して“ハの字型”に搭載された2基のメインエンジンは、横方向に生じる推力を互いに打ち消し合うように設計されていました。
でも、片方を失ったことで“SLIM”は横方向(東側)に移動しなが降下を継続することになります。
この状況下で搭載ソフトウェアは自律的に異常を判断し、徐々に東側に移動する“SLIM”の水平位置がなるべく崩れないように制御しながら、もう1基のエンジンでの降下を継続。
高度約5メートルで“LEV-1”と“LEV-2”を放出した“SLIM”は、メインエンジンの異常発生から30秒余りが過ぎた同日0時19分52秒頃、当初の着陸目標地点から東へ約55メートル離れた地点へ、ほぼ垂直の姿勢で接地したと見られています。
接地時の降下速度は1.4m/s程度と仕様範囲より低速でした。
でも、横方向の速度や姿勢などの接地条件が使用範囲を超えていたので、結果として計画と異なる姿勢で接地。
姿勢が大きく変化した“SLIM”は、太陽電池パネルを西へ向けてつんのめったような姿勢で安定することになります。
メインエンジンの推力が失われた原因については、メインエンジン自体ではない何らかの外的要因が波及した可能性が考えられていて、現在も調査中です。
今後進められるのは、取得できた技術・科学的データのさらなる分析や、異常が発生した原因の調査。
分析では“SLIM”の太陽電池は西を向いていることから、今後月面で太陽光が西から当たるようになれば、発電の可能性もあるようです。
JAXAが想定していた“SLIM”の月面上での活動は元々数日程度以上とのことですが、さらなる技術・科学データの取得を目指し、引き続き復旧へ向けて必要な準備を行った行くそうです。
また、月面に展開された小型プローブ“LEV-2”が撮影した着陸後の“SLIM”の画像から分かったこともあります。
それは、“SLIM”が着陸したSHIOLIクレーター付近は着陸時点では昼の前半だったので、画像からも分かるように太陽光は東から当たっていて、西に向いた太陽電池パネルは影に入って電力が発生しない状況にあったことです。
ただ、昼の後半には西から太陽光が当たるようになるので、太陽電池パネルから電力が得られる可能性があるんですねー
JAXAによれば、“SLIM”は太陽電池による発生電力が一定以上あれば動作できるので、今後の運用再開が期待されています。
月のマントルに由来するカンラン石の組成を分析
マルチバンド分光カメラは、月のマントルに由来するカンラン石を含んだ岩の分光観測を目的に搭載された観測機器です。
では、なぜカンラン石を分析するのでしょうか?
それは月の起源を探るためです。
月は、ジャイアントインパクト(巨大衝突)という形成過程を経て形成されたと考えられています。
ジャイアントインパクト説によれば、45億年前に火星サイズの天体“テイア”が、作られて間もない原始の地球に衝突。
この衝突から生まれた破片が、かなり急速(おそらく数百万年強の間)に分離し、月を形成したと考えられています。
そこで、月のマントルに由来するカンラン石の組成を分析し、その結果を地球のマントルと比較することで、ジャイアントインパクト説を検証する訳です。
マルチバンド分光カメラによる観測は、着陸後に低解像度のスキャンを行って観測対象となる岩石を特定してから、高解像度の分光観測を行う予定でした。
スキャンは通常なら35分で333枚の画像を取得するはずが、太陽電池の発生電力が得られない状況なので15分で打ち切ることに…
このため、257枚の画像取得と送信が行われています。
マルチバンド分光カメラによる高解像度分光観測の実施は、太陽電池の発生電力が今後回復するかどうかにかかっています。
観測候補の岩石には、相対的な大きさがイメージできるように“セントバーナード”や“しばいぬ”といった愛称が付けられていて、今後電力が回復した際には速やかに観測が行えるよう準備が進められています。
SLIMミッションの技術実証の結果と成果
最終的に“SLIM”は、着陸目標地点から約55メートル離れた場所に着陸することに成功しました。
JAXAは合計14回(7領域で2回ずつ)実施された画像照合航法の結果は全て正常に完了していて、航法精度は10メートル程度以下、高度約50メートル行われた障害物回避マヌーバ付近までの状況から、ピンポイント着陸精度も10メートル程度以下(おそらく3~4メートル)と評価しています。
これまでの月探査機の着陸精度が数キロから十数キロ以上だったので、“SLIM”は驚異的な着陸精度を実証したと言えます。
これほどの着陸精度を発揮したからこそ、メインエンジン1基の喪失という事態に遭遇しても、フルサクセス項目の1つ“100メートル精度のピンポイント着陸”の技術実証を達成できたと言えます。
ただ、これまでの方法では着陸が難しい斜面にも安定した姿勢で接地するために考案された2段階着陸方式(※2)の挙動は、接地時の横方向速度や姿勢が仕様範囲を超えていたこともあり、今回のミッションでの技術実証はできませんでした。
また、ミニマムサクセス項目の1つ“金属3Dプリンターで製造された軟着陸のためのシンプルな衝撃吸収機構の実現”や、エクストラサクセス唯一の項目である“月面到達後に日没まで一定期間ミッションを行う”など、一部の工学実験目標は調査中もしくは継続中になっています。
今後、太陽光が太陽電池パネルに当たるようになれば、再び動作する可能性があるので、もうしばらくは“SLIM”から目が離せない状況が続きます。
2機の小型プローブ“LEV-1”と“LEV-2”
月面に展開された2機の小型プローブうち“LEV-1”は、2024年1月20日0時19分49秒~51秒の間に“SLIM”から放出され、同日0時19分51秒~53秒の間に月面に着陸し、同日0時20分30秒から月面での活動を開始しています。
40分以上可能な限りと計画されていた活動時間は1時間51分程度続き、通信電波は同日2時10分に停止したようです。
“LEV-1”にはバネの力で月面を蹴るパッドが搭載され、跳躍(ホッピング)しながら移動できる仕組みになっていて、月面で6回跳躍したことが取得されたデータから確認されています。
一方、愛称のSORA-Qで知られる“LEV-2”も“SLIM”からの放出後に月面に着陸。
2つに分割された外殻を展開して活動したことが分かっています。
さらに、LEV-2”が撮影した着陸後の“SLIM”の画像からは、
“SLIM”から正常に放出された“LEV-2”が月面で想定通り変形して活動したこと、
“SLIM”の検出と画像の選定を行う画像処理アルゴリズムが正しく機能したこと、
“LEV-1”との間で正常に通信が交わされ“LEV-1”経由で画像が送信されたこと、
などの機能が正常に動作したことが確認できました。
こうした成果が確認されたことで、“LEV-1”と“LEV-2”は“日本初の月面探査ロボット”になったと同時に、“世界初の完全自律ロボットの月面探査”、“世界初の複数ロボットによる同時月面探査”を達成したことになります。
さらに、“LEV-1”は“世界初の跳躍による月面移動”、“LEV-2”は“世界最小・最軽量の月面探査ロボット”にもなっています。
小さなサイズで大きな記録を残した“LEV-1”と“LEV-2”ですが、太陽電池が搭載されている“LEV-1”の運用はまだ終わっていません。
計画通りの活動期間を終えた“LEV-1”は、現在バッテリーの電力を使い切ったか、温度が上昇したため活動を停止して待機中の状態。
太陽電池パネルに太陽光が当たるようになったり、温度が下がったりすれば活動を再開する可能性があります。
このことから、引き続き“LEV-1”からの電波を受信する体制を維持する予定です。
昨今、対象になる天体についての知見が増え、探査すべき内容が今までよりも具体的になっているので、探査対象の付近への高精度着陸が必要になっています。
また、将来の太陽系科学探査で必要になるのが、より高性能な観測装置の搭載です。
その時のために探査機システムを軽量化し、その分を観測装置にリソース配分ができるよう、探査機の軽量化は欠かせないんですねー
“SLIM”は、将来の月惑星探査に必要なピンポイント着陸技術と、小型で軽量な探査機システムの実現を目指す月面探査機です。
目指しているのは、これまでの“降りやすいところに降りる”着陸ではなく、“降りたいところに降りる”着陸への質的な転換。
これを実現することで、月よりもリソース制約の厳しい惑星への着陸も、現実のものになっていくはずです。
さらに期待されるのは、“LEV-1”と“LEV-2”の開発と運用で得られた技術が、今後の宇宙探査や月面小型プローブに活かされることです。
月面着陸というイベントは終わりましたが、もう少し“SLIM”と“LEV-1”の活動が続くといいですね。
こちらの記事もどうぞ
“LEV(Lunar Excursion Vehicle)”と呼ばれる2機の小型プローブの放出に成功しています。
でも、着陸時の姿勢などが計画通りではなく、“SLIM”は太陽電池からの電力発生ができない状態に…
バッテリーが過放電して探査機を失うリスクを避けるため、同日午前2:57には地上からのコマンドにより電源をオフにしています。
ちなみに電源オフ時点でのバッテリー残量は12%だったそうです。
ただ、着陸後に地上との通信を確立できていること、太陽電池だけが損傷するような状況は考えにくいんですねー
これらの理由からJAXAが判断したのは、“SLIM”はソフトランディングに成功したものの、機体に固定されている太陽電池パネルの向きが想定とは違う方向を向くような姿勢になっていることでした。
JAXAでは、電源をオフにするまでに取得した各データを分析。
その結果、“SLIM”が当初の目標地点から東側に55メートル程度の位置で月面に到達していることが確認できました。
また、ピンポイント着陸性能を示す障害物回避マヌーバ(※1)開始前(高度50メートル付近)の位置精度としては、10メートル程度以下、おそらく3~4メートルと評価しています。
もちろん、データの詳細な評価は継続する必要があります。
でも、“SLIM”の主ミッション“100メートル精度のピンポイント着陸”の技術実証は達成できたと言えそうです。
※1.マヌーバは、宇宙機に搭載されている推進剤を噴射して、位置や姿勢を制御すること。
“SLIM”からは、今後のピンポイント着陸技術に必要な着陸に至る航法誘導に関する技術データ、降下中及び月面での航法カメラ画像データを全て取得できたそうです。また、接地直前には小型プローブ“LEV-1、LEV-2”の放出にも成功。
さらに、“SLIM”に搭載されたマルチバンド分光カメラ(MBC)についても、電源オフまでの間に試験的に動作し、撮像画像を取得しています。
|
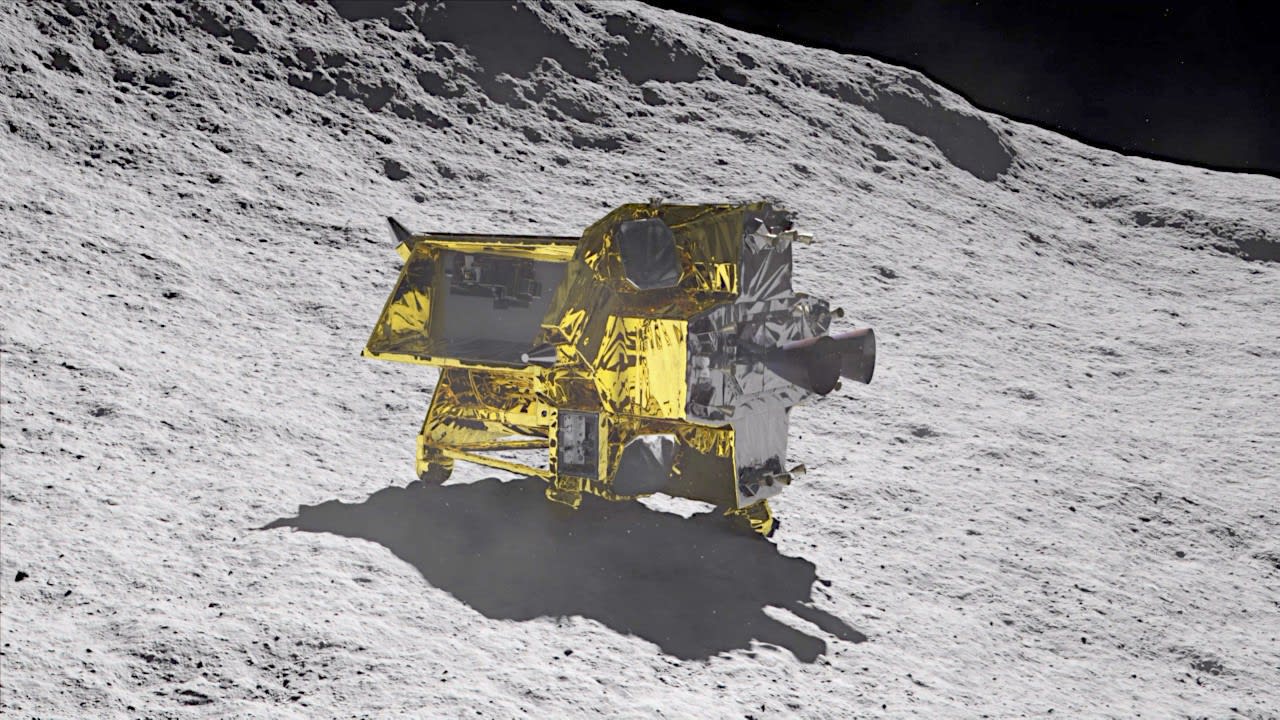
| 図1.月面に着陸した“SLIM”(イメージ図)。(Credit: JAXA) |
片方のエンジンを失った状態での月面着陸
着陸直後から太陽電池の発生電力が得られない状況が確認されたので、JAXAではあらかじめ用意していた異常時対応手順を実施。
着陸から同日1時50分頃にかけて“SLIM”上のデータダウンロードや消費電力の削減を試み、1時50分~2時35分頃にマルチバンド分光カメラ(MBC)による月面の観測を行っています。
このダウンロードされた技術データの分析からは、太陽電池パネルが電力を発生しない姿勢で月面に接地した経緯も分かってきています。
原因は、高度50メートル時点で障害物回避マヌーバを開始する直前、“SLIM”に搭載された2基のメインエンジンうち1基の推力が失われたことにあるようです。
“SLIM”の着陸降下シーケンスは、2024年1月19日23時59分58秒に前半の動力降下フェーズが始まっています。
“SLIM”は、カメラで撮影したクレーターの分布を元に位置を把握する、画像照合航法を行いながら水平方向の速度を落としつつ、高度約15キロから約6.2キロまで降下していきます。
そして、後半の垂直降下フェーズに移行した“SLIM”は、高度約4000メートル及び約500メートルで画像照合を行い水平方向の位置を補正しつつ降下を継続(修正量はそれぞれ約100メートルと約50メートル)。
高度約50メートルでは画像を元にした月面の障害物検出が行われ、当初の予定から11.8メートル離れた地点を最終的な目標地点として降下が続けられました。
でも、高度約50メートルまで降下した1月20日0時19分18秒頃、突如“SLIM”に搭載されている2基のメインエンジンの合計発生推力が約55%まで低下。
着陸後の温度変化を調べた結果、片方のメインエンジン(-X側)に何らかの異常が発生したものと考えられています。
同時刻に“SLIM”の航法カメラで撮影された画像にはノズルと見られる物体が写り込んでいたので、ノズル部が破断した結果としてこのメインエンジンの推力が大部分失われたと見られています(実際に何が起こったのかは調査中)。
 |
| 図2.“SLIM”の片方のメインエンジン(-X側)に何らかの異常が発生したと考えられる2024年1月20日0時19分18秒前後に航法カメラで撮影された画像を比較したもの。青矢印で示された月面の岩は前後の画像両方に映っているが、後に撮影された画像(右)で赤矢印で示された特徴は、前に撮影された画像(左)には映っていない。赤丸で示されている物体はメインエンジンのノズルのような形状をしている。(Credit: JAXA) |
でも、片方を失ったことで“SLIM”は横方向(東側)に移動しなが降下を継続することになります。
 |
| 図3.打ち上げ前の2023年6月1日に撮影された“SLIM”。垂直方向に対して“ハの字型”に搭載された2基のメインエンジンのノズルが上を向いている。月面では、この姿勢に近い状態で安定したとみられる。(Credit: JAXA) |
高度約5メートルで“LEV-1”と“LEV-2”を放出した“SLIM”は、メインエンジンの異常発生から30秒余りが過ぎた同日0時19分52秒頃、当初の着陸目標地点から東へ約55メートル離れた地点へ、ほぼ垂直の姿勢で接地したと見られています。
接地時の降下速度は1.4m/s程度と仕様範囲より低速でした。
でも、横方向の速度や姿勢などの接地条件が使用範囲を超えていたので、結果として計画と異なる姿勢で接地。
姿勢が大きく変化した“SLIM”は、太陽電池パネルを西へ向けてつんのめったような姿勢で安定することになります。
メインエンジンの推力が失われた原因については、メインエンジン自体ではない何らかの外的要因が波及した可能性が考えられていて、現在も調査中です。
今後進められるのは、取得できた技術・科学的データのさらなる分析や、異常が発生した原因の調査。
分析では“SLIM”の太陽電池は西を向いていることから、今後月面で太陽光が西から当たるようになれば、発電の可能性もあるようです。
JAXAが想定していた“SLIM”の月面上での活動は元々数日程度以上とのことですが、さらなる技術・科学データの取得を目指し、引き続き復旧へ向けて必要な準備を行った行くそうです。
また、月面に展開された小型プローブ“LEV-2”が撮影した着陸後の“SLIM”の画像から分かったこともあります。
それは、“SLIM”が着陸したSHIOLIクレーター付近は着陸時点では昼の前半だったので、画像からも分かるように太陽光は東から当たっていて、西に向いた太陽電池パネルは影に入って電力が発生しない状況にあったことです。
ただ、昼の後半には西から太陽光が当たるようになるので、太陽電池パネルから電力が得られる可能性があるんですねー
JAXAによれば、“SLIM”は太陽電池による発生電力が一定以上あれば動作できるので、今後の運用再開が期待されています。
 |
| 図4.小型プローブ“LEV-2”が撮影・送信した月面画像。右奥には大きく傾いて接地した状態の“SLIM”(エンジンノズルを上に向けている)が写っている。画像は“LEV-1”経由でデータ転送されたもの。(Credit: JAXA/タカラトミー/ソニーグループ(株)/同志社大学) |
月のマントルに由来するカンラン石の組成を分析
マルチバンド分光カメラは、月のマントルに由来するカンラン石を含んだ岩の分光観測を目的に搭載された観測機器です。
では、なぜカンラン石を分析するのでしょうか?
それは月の起源を探るためです。
月は、ジャイアントインパクト(巨大衝突)という形成過程を経て形成されたと考えられています。
ジャイアントインパクト説によれば、45億年前に火星サイズの天体“テイア”が、作られて間もない原始の地球に衝突。
この衝突から生まれた破片が、かなり急速(おそらく数百万年強の間)に分離し、月を形成したと考えられています。
そこで、月のマントルに由来するカンラン石の組成を分析し、その結果を地球のマントルと比較することで、ジャイアントインパクト説を検証する訳です。
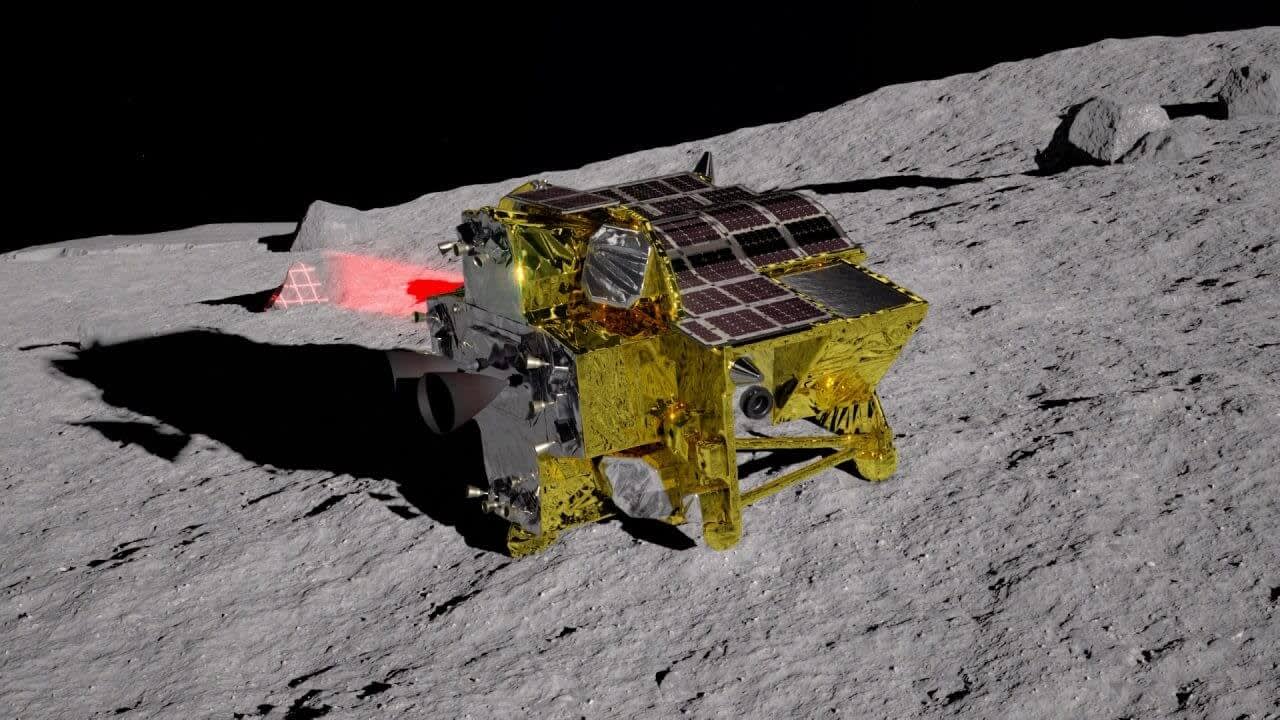 |
| 図5.マルチバンド分光カメラによる観測を行う“SLIM”のイメージ図。着陸後は、このような姿勢で安定することが想定されていたが、実際にはつんのめったような姿勢で安定している。(Credit: JAXA) |
スキャンは通常なら35分で333枚の画像を取得するはずが、太陽電池の発生電力が得られない状況なので15分で打ち切ることに…
このため、257枚の画像取得と送信が行われています。
 |
| 図6.“SLIM”のマルチバンド分光カメラによる月面スキャン撮像で取得されたモザイク画像。275枚の低解像度モノクロ画像を撮像・合成し、景観画像を作製したもの。モザイク画像の右側の灰色部分は、スキャン運用を途中で切り上げたためデータの無い部分。(Credit: JAXA、立命館大学、会津大学) |
観測候補の岩石には、相対的な大きさがイメージできるように“セントバーナード”や“しばいぬ”といった愛称が付けられていて、今後電力が回復した際には速やかに観測が行えるよう準備が進められています。
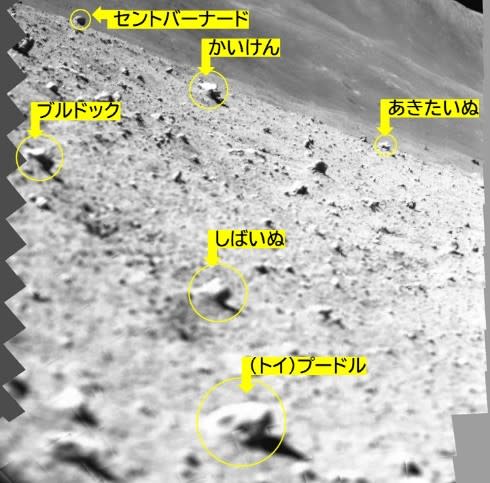 |
| 図7.マルチバンド分光カメラによる月面スキャン撮像で取得されたモザイク画像を拡大したもの。この画像をもとに観測対象の岩石を識別し、相対的な大きさがイメージできるような愛称をつけて、今後電力が回復した時に速やかに10バンド高解像度分光観測が行えるよう準備を進めている。(Credit: JAXA、立命館大学、会津大学) |
SLIMミッションの技術実証の結果と成果
最終的に“SLIM”は、着陸目標地点から約55メートル離れた場所に着陸することに成功しました。
JAXAは合計14回(7領域で2回ずつ)実施された画像照合航法の結果は全て正常に完了していて、航法精度は10メートル程度以下、高度約50メートル行われた障害物回避マヌーバ付近までの状況から、ピンポイント着陸精度も10メートル程度以下(おそらく3~4メートル)と評価しています。
これまでの月探査機の着陸精度が数キロから十数キロ以上だったので、“SLIM”は驚異的な着陸精度を実証したと言えます。
これほどの着陸精度を発揮したからこそ、メインエンジン1基の喪失という事態に遭遇しても、フルサクセス項目の1つ“100メートル精度のピンポイント着陸”の技術実証を達成できたと言えます。
ただ、これまでの方法では着陸が難しい斜面にも安定した姿勢で接地するために考案された2段階着陸方式(※2)の挙動は、接地時の横方向速度や姿勢が仕様範囲を超えていたこともあり、今回のミッションでの技術実証はできませんでした。
※2.月面に対して垂直の姿勢で降下し、着陸直前に機体を斜めに傾けて半円形をした脚で一度接地してから、斜面に向かって倒れ込むように横向きに設置するという特徴的な着陸方法になります。
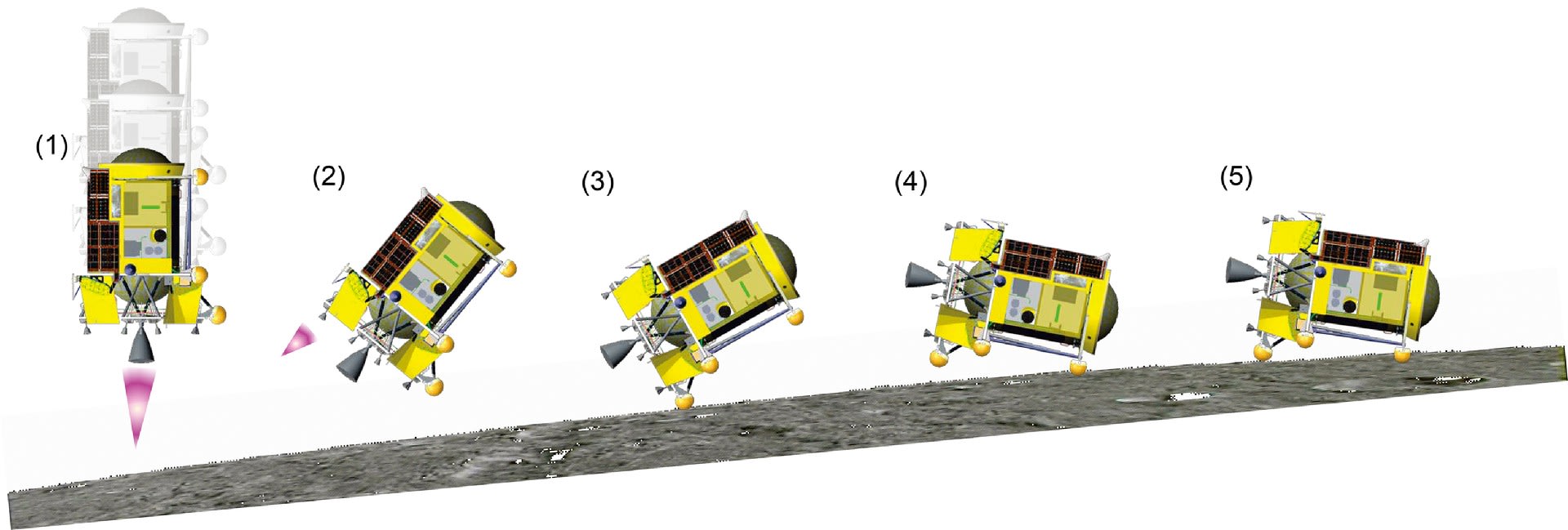 |
| 図8.“SLIM”は、月周回軌道を離れてからは、月面に対して垂直の姿勢で降下。着陸直前に機体を斜めに傾けて横向きに設置するという特徴的な着陸方法を採用している。(Credit: JAXA) |
今後、太陽光が太陽電池パネルに当たるようになれば、再び動作する可能性があるので、もうしばらくは“SLIM”から目が離せない状況が続きます。
2機の小型プローブ“LEV-1”と“LEV-2”
月面に展開された2機の小型プローブうち“LEV-1”は、2024年1月20日0時19分49秒~51秒の間に“SLIM”から放出され、同日0時19分51秒~53秒の間に月面に着陸し、同日0時20分30秒から月面での活動を開始しています。
40分以上可能な限りと計画されていた活動時間は1時間51分程度続き、通信電波は同日2時10分に停止したようです。
“LEV-1”にはバネの力で月面を蹴るパッドが搭載され、跳躍(ホッピング)しながら移動できる仕組みになっていて、月面で6回跳躍したことが取得されたデータから確認されています。
一方、愛称のSORA-Qで知られる“LEV-2”も“SLIM”からの放出後に月面に着陸。
2つに分割された外殻を展開して活動したことが分かっています。
さらに、LEV-2”が撮影した着陸後の“SLIM”の画像からは、
“SLIM”から正常に放出された“LEV-2”が月面で想定通り変形して活動したこと、
“SLIM”の検出と画像の選定を行う画像処理アルゴリズムが正しく機能したこと、
“LEV-1”との間で正常に通信が交わされ“LEV-1”経由で画像が送信されたこと、
などの機能が正常に動作したことが確認できました。
 |
| 図9.月面に到達した2機の小型プローブ“LEV-1”(左)と“LEV-2”(右)のイメージ図。(Credit: JAXA) |
さらに、“LEV-1”は“世界初の跳躍による月面移動”、“LEV-2”は“世界最小・最軽量の月面探査ロボット”にもなっています。
小さなサイズで大きな記録を残した“LEV-1”と“LEV-2”ですが、太陽電池が搭載されている“LEV-1”の運用はまだ終わっていません。
計画通りの活動期間を終えた“LEV-1”は、現在バッテリーの電力を使い切ったか、温度が上昇したため活動を停止して待機中の状態。
太陽電池パネルに太陽光が当たるようになったり、温度が下がったりすれば活動を再開する可能性があります。
このことから、引き続き“LEV-1”からの電波を受信する体制を維持する予定です。
昨今、対象になる天体についての知見が増え、探査すべき内容が今までよりも具体的になっているので、探査対象の付近への高精度着陸が必要になっています。
また、将来の太陽系科学探査で必要になるのが、より高性能な観測装置の搭載です。
その時のために探査機システムを軽量化し、その分を観測装置にリソース配分ができるよう、探査機の軽量化は欠かせないんですねー
“SLIM”は、将来の月惑星探査に必要なピンポイント着陸技術と、小型で軽量な探査機システムの実現を目指す月面探査機です。
目指しているのは、これまでの“降りやすいところに降りる”着陸ではなく、“降りたいところに降りる”着陸への質的な転換。
これを実現することで、月よりもリソース制約の厳しい惑星への着陸も、現実のものになっていくはずです。
さらに期待されるのは、“LEV-1”と“LEV-2”の開発と運用で得られた技術が、今後の宇宙探査や月面小型プローブに活かされることです。
月面着陸というイベントは終わりましたが、もう少し“SLIM”と“LEV-1”の活動が続くといいですね。
こちらの記事もどうぞ










ピンポイント着陸は成功しても、太陽電池からの電力発生ができない状態にでは非常に心配してました。
詳しく書いていただけたので、何だか納得しました。
気分がで!脳は追いついてませんよ(;^_^A
しばいぬとかあきたいぬなどで名称を(笑)(笑)
JAXAの方がたって、いつもユーモアたっぷりですよね。
今後も記事楽しみにしてます。