2021-05-05
このキット、走行状態から飛行状態へ姿勢を変えるギミックが付いています。
折角なのでモータで動かしたいと思います。
と思ったら、何と「どろぼうひげさん」が動かしているのを見つけ、参考にすることにしました。
スペースの関係から、参考というより丸っとコピーさせていただくことにしました。
「どろぼうひげ様、有難うございます」
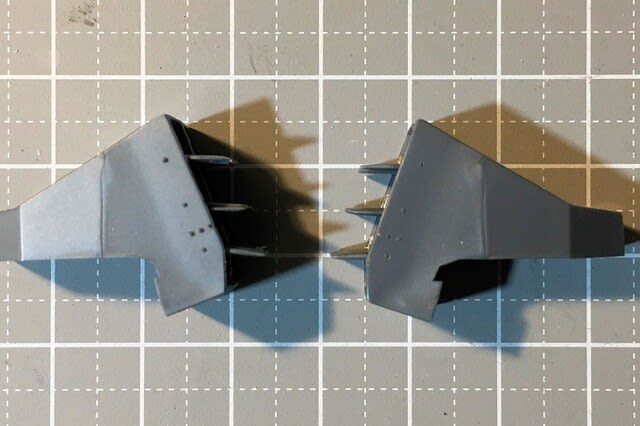
機構はギヤードモータでM3ねじを回し、M3ナットを固定する事でスライドさせるという、送りねじ方式です。
停止位置の検出は超小型マイクロスイッチを使います。
(この構造は個人的に懐かしい機構です。)
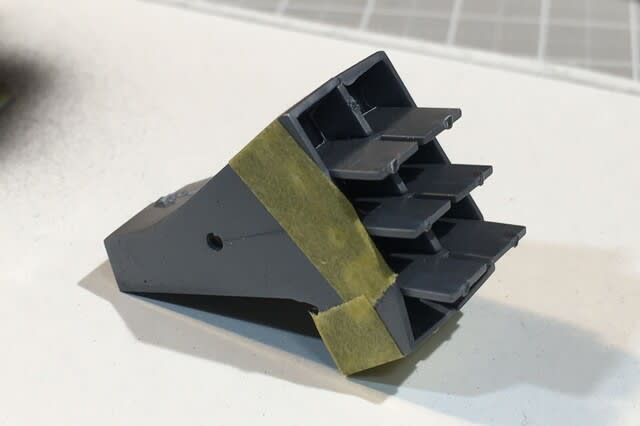
▼手持ちのギヤードモータを取付けます。
モータ出力シャフトとM3ねじは、アルミパイプを使い、ホーローネジで固定させます。
取付け板は1.2Tプラ板を加工します。
▲M3ねじのピッチは0.5mmで、必要なスライド量は16mmです。
ギヤードモータはDC2.7V150rpmで、今回はDC5Vで駆動するため250rpmで回ります。
16mmスライドさせるには32回転なので、計算上では 60x32/250=7.7secとなります。
▼ザク電飾でも使ったPIC(12F1822)、RC可動戦車で使っているモータドライバDRV8835を基板に実装します。
マイクロスイッチはディテクタスイッチES22MH4XDKを使います。
切替スイッチはタクトスイッチを使っています。
▼ギリギリサイズなので心配でしたが、何とか搭載できました。