








2020-03-05
2018年8月に製作したタミヤのM3スチュアート後期型を改造する事にしました。
と言っても外観ではなく、内部のRC駆動装置をVSタンク駆動ユニットを利用したものから、
Arduino制御方式に換装します。
理由は、VSタンクユニットでは出来ていない砲身上下可動、主砲、機銃発光、灯火の点灯などさせるためです。
砲身リコイルや銃器の発砲音も出来れば組み込みたいと思います。
ArduinoユニットなどはVSタンクユニットより大きいので、内蔵できるか不安です。
中の状態は下の画像の通りです。
因みに、画像右下に移っているのがArduinoとUSBホストシールドです。
Arduinoはマイコンボード、USBホストシールドはArduinoに合体し、
USBドングルを差してbluetooth通信を可能にさせるものです。

必要な部品をネット注文しました。
届くまでは、目についたところから改造作業をします。
先ず、機銃を発光させるために、根元から切断し、0.6mm穴を貫通させます。
失敗しない様に0.4mm、0.5mmと少しずつ穴を大きくしていきます。
0.5mmアクリルファイバーを通して、3Φ赤色LEDの光を導光させ、銃口部分を発光させます。
主砲も同様に0.6mm穴を貫通させます。
全長を3分割して穴を通し、接合時には中に0.5mm真鍮線を挿入して瞬着で接合しました。
砲塔旋回は、マイクロサーボにセンタープーリーを取付けて旋回するのは、サイズ的に難しいです。
既設のマイクロギヤモータを使いますが、正逆回転させるのにはモータドライバが必要になります。
と言う事も有って、マイクロサーボのアンプを使ってこのモータを回すことにします。
画像左上が今手に入る3.7gアナログマイクロサーボ、右上が定番のSG90マイクロサーボ、
左下がFS0307、右下はES9251Ⅱデジタルマイクロサーボです。
サーボを分解し、ポテンショメータと出力軸の結合を外して連続回転サーボに改造します。
停止は90°、90°より大きいか小さいかの命令でCW、CCW回転させます。
問題なのは、90°の命令で直ぐに止まらない場合がある事です。
上記の4種類では左下のもの以外は90から180°程オーバーランして止まりました。
と言う事でFS0307を利用する事にします。
サーボのモータの替わりにギヤモータを作動させると言う事です。
因みにSG90以外のサーボ内蔵モータとギヤモータは全く同寸法でした。
最終的にはギヤモータはそのまま使用する事になりましたが、
改造作業の途中段階では、スピードが速すぎたのでギヤを1段増やして減速する方法も試しています。
どう言う訳か、FS0307以外のアンプとの組み合わせでは早すぎました。
(現在入手できなくなっている以前の3.7gマイクロサーボのアンプも使えそうですが手持ち在庫が有りません)
こんな感じに取りつきます。
砲塔内部の右側の白い箱はHK-5330デジタルマイクロサーボです。
砲身上下可変用に使いました。
動作確認用にArduinoテスト機を使って動作確認をして、各部の調整とプログラムの調整をします。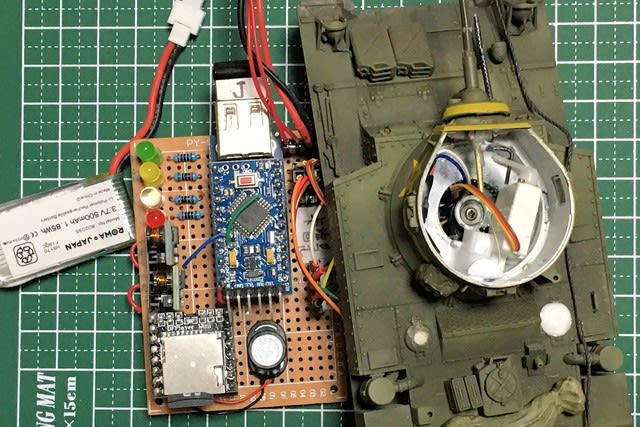
※コメント投稿者のブログIDはブログ作成者のみに通知されます