








Curiosityの情報更新を米惑星協会のEmillyさんが纏めてくれていますので、メモします。
http://www.planetary.org/blogs/emily-lakdawalla/2018/curiosity-update-sols-2163-2156.html
この数カ月間の期間は、Curiosityミッションにとって挑戦的なことでした。しかしチームの努力と固執は彼らが主要なコンピュータ異常から回復して、そしてVera Rubin尾根で科学目標を進歩させるのを見ました。好奇心は、Sol1809以来、4つの異なるタイプの岩を掘ることを試みて、尾根を探求していました。尾根岩は掘削が困難であることが証明されていますが、作業はほぼ完了しています。Sol2224にHighfieldの3番目に成功したドリルサイトで、彼らは最後の尾根への挑戦、とりわけ赤い岩のドリルサイトに取り組む準備ができています。
最初にコンピュータの問題について説明し、次に科学的な操作に関する最新情報を提供します。しかし、私がそれらのことのうちのどちらかをする前に、ただ楽しみのために:下図は、ダストでビルの群れのビデオ!Galeクレーターでは風が強くなっています。
下図は、Sol2215でのダストデビル
 (C)NASA / JPL /フレッド
(C)NASA / JPL /フレッド好奇心は定期的に地平線の火星の景色を見渡し、ちりを大気中に持ち上げる一時的な出来事を探すために一連の画像を撮ります。Sol2215(2018年10月30日)に、運が良く、何枚かのダストでビルが視野を横切った。このアニメーションでは、静止した風景からの変化を強調するように画像が処理されているため、見つけにくいほこりの悪魔がより見やすくなります。アニメーションは約30分です。
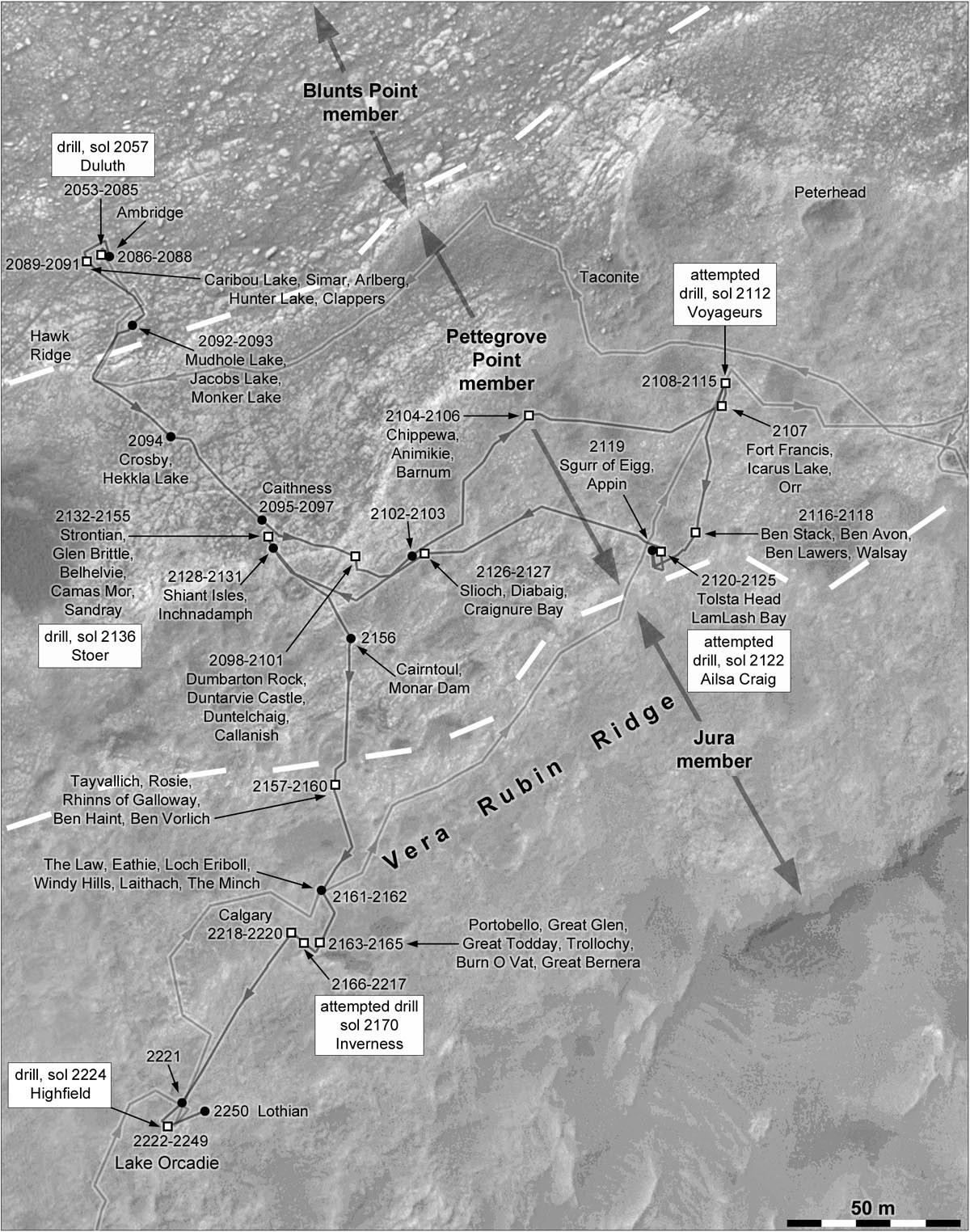
そして、下図がPhil Stookeさんによる最新の地図で、このブログ記事のコンテキストを提供しています。このアップデートにおけるCuriosityの活動はすべて左下隅で行われました。
 (C)NASA / JPL / UA / Phil Stooke
(C)NASA / JPL / UA / Phil StookePHIL STOOKEの好奇心経路図:ヴェラ・ルビンでのドリルのための移動、Sol2053-2250
①B-side computerの異常
Sol2172(2018年9月15日)、技術者はローバーが奇妙な振る舞いをすることに気付きました。保存された科学データやエンジニアリングデータが送信されませんでした。ローバーは完全に健全で、重要なシステムを実行しても問題はありませんでしたが、後で検索できるようにデータを格納しているメモリの一部にアクセスできなくなりました。ローバーのメモリのその部分のデータ構造が破損しており、ローバーはそれにアクセスできませんでした。これは明らかに科学にとって深刻な問題でしたが、幸いローバーの安全性を脅かすことはありませんでした。
それでも、ローバーが後で検索するために情報を保存できなかったという事実は、問題を解決することを非常に困難にしました。ミッションは、最善の行動はバックアップコンピュータと交換することであると判断しました。バックアップが行われると、(以前の)メインコンピュータのトラブルシューティングが可能になります。A側のコンピュータのフラッシュメモリに深刻な問題が発生したとき、好奇心は、Sol200からずっと、ほぼ2000Solの期間、B側のコンピュータを使用してきました。Sol772までは、Bサイドコンピュータのバックアップとして使用するためにAサイドコンピュータを再認証する必要がありました。ソフトウェアパッチにより、Aサイドコンピュータがフラッシュメモリの半分を使用するのを防ぎます。
好奇心はSol 2204に限られた操作に戻り、Sol 2216でチーム全員で科学計画を再開しました。チームがしなければならなかったとんでもない量の仕事と彼らがどれほど慎重にやらなければならなかったかを考える - ローバーをA側のコンピューターに戻す。一方、Sol 200の異常とは異なり、B側のコンピュータは、A側のバックアップとして使用できます。好奇心はB側の上で安全に実行されるでしょう、それはちょうど科学をすることができないでしょう。
地球外の惑星でローバーとコンピューターを交換することの難しい詳細を楽しんでいるあなたのために、私がプロジェクト科学者Ashwin Vasavadaと話すことから学んだことを読んでください。それ以外の場合は、この更新のサイエンスオペレーションのセクションに進んでください。システム管理者、あなたはこれを好きになるでしょう。
非常に遠くからのコンピュータのトラブルシューティング
A側のコンピュータを回転させるのは、単に電源を入れるだけでは困難でした。1つの理由は、2台のコンピューターが異なるセットの重要なハードウェアに接続されていることです。特に、2台のコンピューターは、ローバーのマストにあるNavcamsとローバーの腹にあるリアおよびフロントのHazcamという2つのまったく異なるエンジニアリングカメラに接続されています。5地球年以上の間、A側コンプーターはカメラのどれの光子を見ていませんでした。彼らは電源を入れて自分のペースを通り抜けなければならず、彼らの画像は古いキャリブレーションモデルと照合しました。
 (C)NASA / JPL
(C)NASA / JPL
CURIOSITYのカメラの位置
ローバーは、自律ナビゲーションや、手を伸ばして火星に触れる腕の操作を計画するためにNavcamsとHazcamsを使用しているため、視点がわずかにずれたときに問題になります。(具体的に言うと、CuriosityがB側からA側に切り替わると、Navcamの視点は4.8 cm上に移動し、前面のHazcamの視点はローバーの右側に8.2 cm移動し、背面のHazcamのビューは移動しましたローバーを1メートル左に移動します。)
ずっと前に、ソル200の異常の後に最後のコンピュータ交換が行われたとき、エンジニアはB側Navcamsが自律ナビゲーションを特に難しくしている彼らのポインティングにおいて奇妙な温度依存幾何学効果を経験したという不快な発見をしました。A側に切り替えることにした今、彼らはA側のカメラが同じ問題を持っていないことを確信できませんでした。 5年間の間に変化したかもしれません。それで彼らはそれらがそれらのカメラのために移動局のナビゲーションソフトウェアに温度依存性を書く必要がないことを確かめるために1Sol(1火星日)分の温度変動を通してA側のカメラのテストをしなければなりませんでした。そのために、Sol2209に彼らはカメラの各ペアで14セットの画像を撮った2209そしてSol2210上の早朝に、さらに8セット、を撮りました。ありがたいことに、これらのテストでは、Navcamsはうまく機能していて、ナビゲーションに影響を与えるような温度に依存するポインティングがないことが示されました。
 (C)NASA / JPL /ショーンドラン
(C)NASA / JPL /ショーンドラン
REAR_HAZCAMの一日
次に、エンジニアはA側のコンピュータの更新に気を配らなければなりませんでした。それはすでに最新版のオペレーティングシステムを実行していましたが、2000 solsに相当する設定ファイルの更新を逃していました。これらのファイルには、過去2000solsですべての異なる機器用に開発されたすべての観測シーケンスとルックアップテーブルのようなものが含まれています。エンジニアはB側のコンピュータで必要なファイルパーティションにアクセスできないため、あるコンピュータから別のコンピュータに設定ファイルを単純にコピーすることはできませんでした。ローバーコンピュータは、ハードウェアの側面を制御する何百もの個々のパラメータも格納します。A側のコンピュータは、まだメモリにこれらを持っていましたが、そのメモリはSol200以来更新されていませんでした。これらのどれもが個々にチェックされなければなりませんでした。
すべてのチームは、ローバーにアップロードしたすべてのものを調べて、不足している設定ファイルをリカバリチームに提供する必要がありました。その後、リカバリチームはそれらをパッケージ化してA側コンピュータにアップロードする必要がありました。これは、簡単に言うと、素早いプロセスではなく、Ashwinはチームの作業を高く評価しました。「JPLベースのプロジェクト科学者として、世界中の科学者がこれらの課題に取り組んでいるのを見るのは本当に楽しいです。異常対応チームには、現在のローバーエンジニアだけでなく、ローバーの開発に携わったことがある何人かの人々も含まれています。 JPLの他のプロジェクト (これらの余分な人々の大部分は現在彼らの現在のプロジェクトに戻ってきており、そしてそれは現在のCuriosityエンジニアに戻ってB側コンピュータの診断を続けている。)
エンジニアは、失われた日々が科学への打撃であることを十分に知っているので、より簡単な機能(REMS、RAD、およびDAN機器による環境モニタリングなど)により、科学調査にできるだけ早く戻ることができると示唆しました。 )最初にオンラインに戻り、他の機能をゆっくりと立ち上げます。エンジニアは、環境科学を再びSol2204で進め、REMSとRADの環境記録に32-solのギャップを残しました。フルサイエンスはSol2216から再開しました。チームは、介在する週の間に風が作業スペースからほこりやドリルの尾鉱を洗い流し、試みられたドリルの場所が著しくきれいになったことを発見しました。ここで概要の鮮明さに感銘を受けました。
 (C)NASA / JPL / MSSS
(C)NASA / JPL / MSSSインヴァネスで試みたドリルサイト
好奇心は、Sol2170に、ヴェラ・ルービン尾根の「灰色のジュラ」部分の場所であるインヴァネスで掘削を試みました。ドリルは非常に硬い岩を突き抜けませんでした。次に、探査車はSol2172でコンピュータ異常に苦しみました。掘削場所のこの写真は、Sol2217で通常の科学操作に戻った後に撮られました。掘削と写真を分けた45のSolでは、風はドリルサイトからすべての粉を吹き飛ばしました。ドリルのくぼみの幅は約16ミリです。
インバーネスのすぐ隣にあるローバーは、グランジという名前の魅力的なターゲットの下図の写真を撮りました。一体何がそれらの小さな黒い結節ですか?ChemCamがこのスポットを作って見つけた結果が待ちきれません。Lossiemouthという名前のMAHLIターゲットにも同様の機能があります。
 (C)NASA / JPL / MSSS /ポールハモンド
(C)NASA / JPL / MSSS /ポールハモンドグランジ、ミネラルクリスタルのターゲット、好奇心ゾル2217
好奇心はSol2217試みられたドリルサイトthe Invernessの近くでこの写真を撮りました。グランジは面白い暗い色の結晶を含みます。
エンジニアはSol 2218で短いテストドライブをし、Sol 2221で視覚的オドメトリー(走行距離走行の自律的チェック)を使って再開し、Sol 2222でLake Orcadieにぶつかりました。Sol 2221で総任務走行距離が20キロメートルを超えました。
私がマイルストーンについて話している間、ローバーはSol2210でSpiritの活動Solを超えました。Curiosityは、今、火星探査ローバーで史上2番目に長い寿命となりました。





