








| 久しぶりにArduinoを使った電子工作をした。 工作というより複数のサーボモーターを駆動させる回路とスケッチ(プログラム)の作成です。 スケッチはこちらのHPに記載されているのをそのまま利用させていただきました。 |
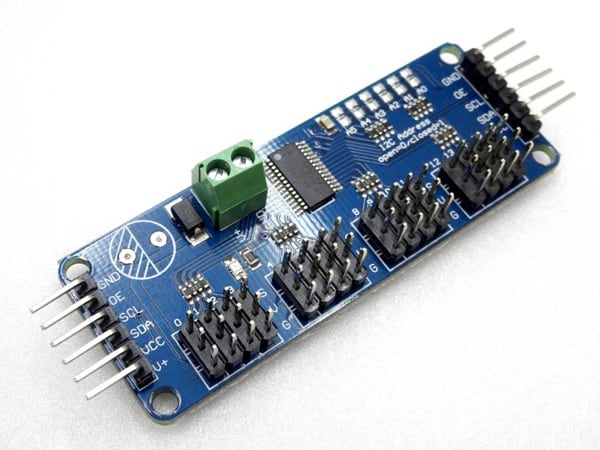
Amazonで買った"PCA9685 16Channel 12bit PWM サーボドライバー基板"
Arduinoのアナログ2本のラインで16台までのサーボを制御できる。基板を連結すれば最大992台のサーボを制御できるらしい。
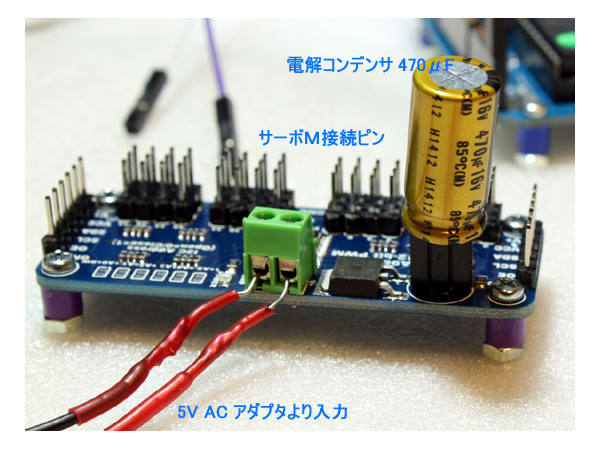
サーボモーター用の電源はACアダプタ経由の5V電源を入力。
電解コンデンサの容量は1サーボモーター当たり100μFが目安。今回は4個のサーボモーターを駆動させたいので470μFを接続した。電解コンデンサの設置は2ピンのピンソケットを基板にはんだ付けしてコンデンサは交換ができるようにした。
画像で針の山になっている部分にサーボモーターを挿し込む。
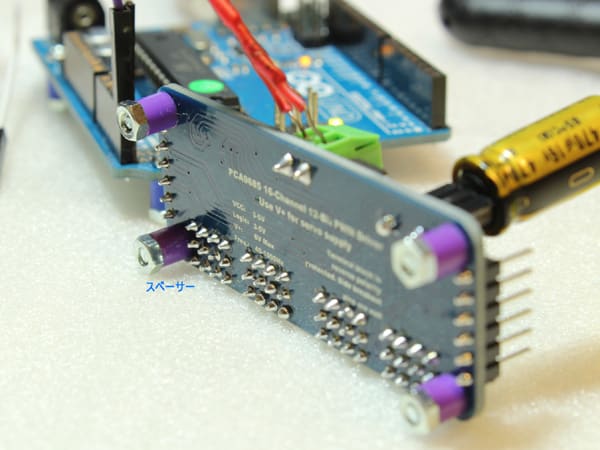
サーボモーター基板の足にはスペーサーとして"アイロンビーズ"を使った。高さが5mmなのでちょうどいい。
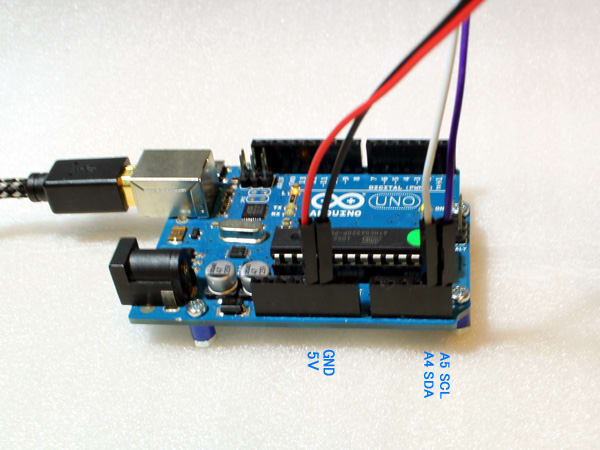
マイコンArduinoとサーボモーター基板を接続しているリード線はたった4本!
5Vピン、GNDピン、A4(SDA)ピン、A5(SCL)ピンだけでOKだ。
Arduinoへスケッチの書き込みを完了させて4個のサーボモーターが回転する様子は下のYou Tube動画をご覧ください