








| 前回は普通にDCモーターを駆動させる回路を実行しました。それだとモーターの一定方向への回転と、動力電源をスイッチでON,OFFさせるしかできません。[Micro:bit]を使うと、DCモーターの正転・逆転・停止・ブレーキを制御することができるようになります。もちろん他のマイコン、[Aruduino]や[Raspberry pi]でも同じように制御できます。 |

配線図を[BSch3v]で作成、実配線はブレッドボードで作成した。使用部品は
- maicro:bit(edge)
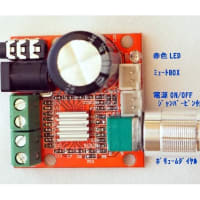
- モータードライバーモジュール
- DCモーター
- モーター駆動用電源(5V)
- [micro:bit](edge)用電源(3V)

[Micro:bit](edge)の使用端子

「TB6612FNG搭載デュアルモータードライバー」への実配線

「JavaScriptブロックエディター」でプログラムを作成
3秒毎に正転・停止・逆転・ブレーキを繰り返すプログラムです









※コメント投稿者のブログIDはブログ作成者のみに通知されます