








水稲春作業にAgriBus-NAVIを使い出しました。
耕運よりも代掻きに威力を発揮しました。
僕のハローは2.6mです。
トラクタの最小回転半径は実測で3mでした。
作業機幅そのままの設定
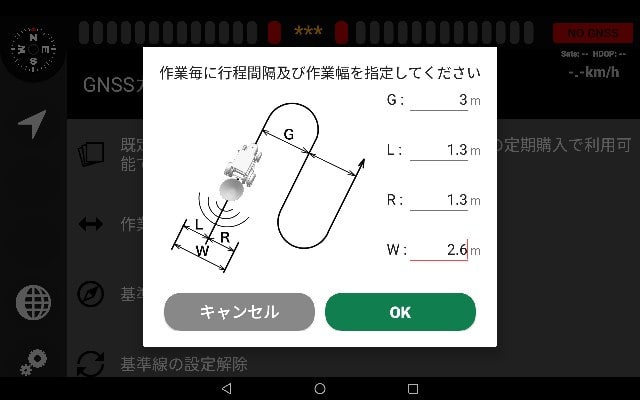
作業機の重複をちょっと考慮して100mm小さい設定しました。

トラクタの屋根の上に灰皿をガムテープで固定してラジアルにしてみました。

無コ播種の場合、田植え機と同じように、畦畔から2.6m隔てた地点が播種スタートになります。
畦畔脇を空打ちでスタートへ移動する際にA点とB点を登録して基準線を作成します。
今のところ、日中の小雨程度での播種作業なので、前回播種した跡がわかるので、条合わせは目視で可能です。作業してみるとDGPSでも十分参考にはなります。
本題、CQのRTK評価ボードが届きました。
上2個は、「 トラ技RTKスタータキット基準局用【TGRTK-A】 」です。
下1個は、「 トラ技RTKスタータキット移動局用【TGRTK-B】 」です。

基地局が2個買ったのは、1つは、母屋の屋根に固定運用します。
そんで、公開基地局として運用します。
もう1個は、母屋の基地局からの補正では精度が出ない場合に備えて、ポータブル基地局ように買いました。まぁ、保険ってことですね。
あとは、netlibを稼働させるパソコン or Raspberry Piを買ってと。
秋までには、運用できるように開発を進めて、本格運用は冬の除雪でコマツのWA-40からを計画してます。
自宅敷地をKMLファイルで圃場登録して、側溝へ敷いた鉄板の位置を登録したり、散水バルブなど除雪作業で破損させる可能性のあるもの、スタックするようなポイントを登録して脱輪せずに除雪できるような環境を構築しようと思います。
そんで、無理だろうけど、来年の春作業ように圃場データをKML化したいところです。クボタのKSASが対応していると圃場等登録作業が冗長せずに済むんですけどね。
基地局は僕が運用担当するので、の方が使いたい場合は、トラクタへつけるローバー側は AgriBus-GMini を買ってもらおう。
耕運よりも代掻きに威力を発揮しました。
僕のハローは2.6mです。
トラクタの最小回転半径は実測で3mでした。
作業機幅そのままの設定
作業機の重複をちょっと考慮して100mm小さい設定しました。
トラクタの屋根の上に灰皿をガムテープで固定してラジアルにしてみました。
無コ播種の場合、田植え機と同じように、畦畔から2.6m隔てた地点が播種スタートになります。
畦畔脇を空打ちでスタートへ移動する際にA点とB点を登録して基準線を作成します。
今のところ、日中の小雨程度での播種作業なので、前回播種した跡がわかるので、条合わせは目視で可能です。作業してみるとDGPSでも十分参考にはなります。
本題、CQのRTK評価ボードが届きました。
上2個は、「 トラ技RTKスタータキット基準局用【TGRTK-A】 」です。
下1個は、「 トラ技RTKスタータキット移動局用【TGRTK-B】 」です。
基地局が2個買ったのは、1つは、母屋の屋根に固定運用します。
そんで、公開基地局として運用します。
もう1個は、母屋の基地局からの補正では精度が出ない場合に備えて、ポータブル基地局ように買いました。まぁ、保険ってことですね。
あとは、netlibを稼働させるパソコン or Raspberry Piを買ってと。
秋までには、運用できるように開発を進めて、本格運用は冬の除雪でコマツのWA-40からを計画してます。
自宅敷地をKMLファイルで圃場登録して、側溝へ敷いた鉄板の位置を登録したり、散水バルブなど除雪作業で破損させる可能性のあるもの、スタックするようなポイントを登録して脱輪せずに除雪できるような環境を構築しようと思います。
そんで、無理だろうけど、来年の春作業ように圃場データをKML化したいところです。クボタのKSASが対応していると圃場等登録作業が冗長せずに済むんですけどね。
基地局は僕が運用担当するので、の方が使いたい場合は、トラクタへつけるローバー側は AgriBus-GMini を買ってもらおう。