セネガル戦を観戦しながら、RaspberryPi3 ModelBとRTKLIBの組み合わせも作業を進めてます。
先人の方の作業手順に従い、Confファイルを必要最小限にして起動させたら無事にrtkrcvが起動できました。
BeagleBone(無印)でRTKLIB
BeagleBoneでRTKLIB:EVK-6TでRTKLIBのテスト
UTF-8 改行コード LFで以下を保存しました。
# rtkrcv options for single point positioning (2010/08/07, v.2.4.0)
console-passwd =admin
console-timetype =gpst # (0:gpst,1:utc,2:jst,3:tow)
console-soltype =dms # (0:dms,1:deg,2:xyz,3:enu,4:pyl)
console-solflag =1 # (0:off,1:std+2:age/ratio/ns)
inpstr1-type =serial # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr2-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr3-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr1-path =ttyACM0:115200:8:n:1:off
inpstr2-path =
inpstr3-path =
inpstr1-format =ubx # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr2-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr3-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr2-nmeareq =off # (0:off,1:latlon,2:single)
inpstr2-nmealat =0 # (deg)
inpstr2-nmealon =0 # (deg)
outstr1-type =tcpsvr # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
outstr2-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
outstr1-path =localhost:52001
outstr2-path =sol2_%Y%m%d%h%M.pos
outstr1-format =llh # (0:llh,1:xyz,2:enu,3:nmea)
outstr2-format =nmea # (0:llh,1:xyz,2:enu,3:nmea)
rtkrcv>observの結果
TIME(GPST) SAT R P1(m) P2(m) L1(cyc) L2(cyc) D1(Hz) D2(Hz) S1 S2 LLI
15:32:19.0 G05 1 22501445.00 0.00 118245889.68 0.00 -2961.5 0.0 51 0 0 0
15:32:19.0 G13 1 21159672.24 0.00 111194739.03 0.00 -1890.9 0.0 37 0 0 0
15:32:19.0 G15 1 20316624.43 0.00 106764608.67 0.00 73.8 0.0 47 0 0 0
15:32:19.0 G20 1 23235053.43 0.00 122101222.47 0.00 3129.7 0.0 39 0 0 0
15:32:19.0 G21 1 22898715.65 0.00 120333588.78 0.00 521.5 0.0 43 0 0 0
15:32:19.0 G24 1 21062076.80 0.00 110681926.08 0.00 2353.2 0.0 47 0 0 0
15:32:19.0 G28 1 24205739.64 0.00 127201907.97 0.00 -676.5 0.0 33 0 0 0
rtkrcv> statusの結果
Parameter : Value
rtklib version : 2.4.2
rtk server thread : 1993708656
rtk server state : run
processing cycle (ms) : 10
positioning mode : single
frequencies : L1+L2
accumulated time to run : 00:18:01.7
cpu time for a cycle (ms) : 3
missing obs data count : 0
bytes in input buffer : 0,0
# of input data rover : obs(1081),nav(19),gnav(0),ion(271),sbs(0),pos(0),dgps(0),ssr(0),err(0)
# of input data base : obs(0),nav(0),gnav(0),ion(0),sbs(0),pos(0),dgps(0),ssr(0),err(0)
# of input data corr : obs(0),nav(0),gnav(0),ion(0),sbs(0),pos(0),dgps(0),ssr(0),err(0)
# of rtcm messages rover :
# of rtcm messages base :
# of rtcm messages corr :
solution status : single
time of receiver clock rover: 2018/06/24 15:44:59.000310560
time sys offset (glo-gps)(s): 0.000000000
solution interval (s) : 1.000
age of differential (s) : 0.000
ratio for ar validation : 0.000
# of satellites rover : 6
# of satellites base : 0
# of valid satellites : 6
GDOP/PDOP/HDOP/VDOP : 3.0,2.6,1.3,2.3
# of real estimated states : 3
# of all estimated states : 3
pos xyz single (m) rover : -3863741.971,3236465.337,3896142.499
pos llh single (deg,m) rover: 37.89109237,140.04875875,376.561
vel enu (m/s) rover : 0.014,0.018,-0.002
pos xyz float (m) rover : 0.000,0.000,0.000
pos xyz float std (m) rover : 0.000,0.000,0.000
pos xyz fixed (m) rover : 0.000,0.000,0.000
pos xyz fixed std (m) rover : 0.000,0.000,0.000
pos xyz (m) base : 6378137.000,0.000,0.000
ant type rover :
ant delta rover : 0.000 0.000 0.000
ant type base :
ant delta base : 0.000 0.000 0.000
pos llh (deg,m) base : 0.00000000,0.00000000,0.000
vel enu (m/s) base : 0.000,0.000,0.000
baseline length float (m) : 0.000
baseline length fixed (m) : 0.000
monitor port : 0
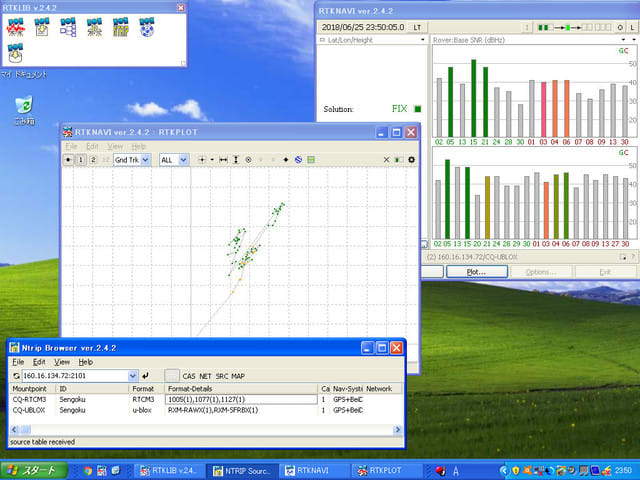
Windowsのrtkplot.exeを実行して軌跡をプロットできました。

少し先進できました。