









先のグランドキャニオン遊覧飛行で、蛇行するコロラド川に沿って自動的に飛ぶためにフライトプランを作成して飛行を行いました。
 「フリーフライト」の画面で、1航空機、3気象、4時刻と季節を選び、「フライトプランナー」を押します。
「フリーフライト」の画面で、1航空機、3気象、4時刻と季節を選び、「フライトプランナー」を押します。
2の現在位置はフライトプランナーで設定する出発地空港が自動的に設定されます。
 「フライトプランナー」の作成画面で、1出発地、2目的地、3フライトプランの種類は IFR(計器飛行方式)を選択、4経路は直行-GPSを選択してから「ルート検索」を押します。
「フライトプランナー」の作成画面で、1出発地、2目的地、3フライトプランの種類は IFR(計器飛行方式)を選択、4経路は直行-GPSを選択してから「ルート検索」を押します。
 編集タブに遷移。出発地と目的地が赤い直線で結ばれた地図が表示されます。
編集タブに遷移。出発地と目的地が赤い直線で結ばれた地図が表示されます。
この赤い線をマウスでドラッグしながら希望のルートを作り上げていきます。
任意の通過点(WP)の他に地図上に示されている空港、VORなども通過点として選定できます。
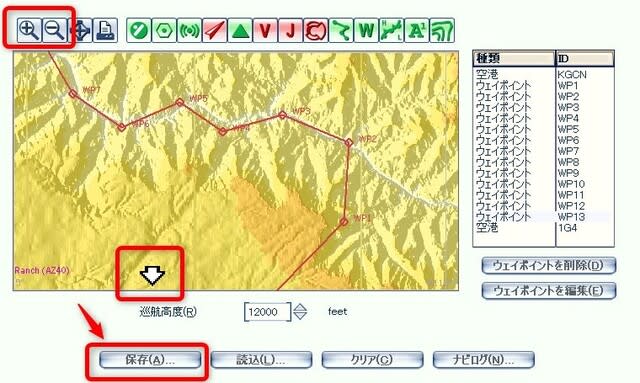 +ーで拡大縮小、画面端に現れる矢印で地図をスクロールさせながら通過点を作り、最後はこのプランを保存します。
+ーで拡大縮小、画面端に現れる矢印で地図をスクロールさせながら通過点を作り、最後はこのプランを保存します。
 保存画面では「IFR 出発空港名 to 目的空港名.PLN」というファイル名で保存されます。
保存画面では「IFR 出発空港名 to 目的空港名.PLN」というファイル名で保存されます。
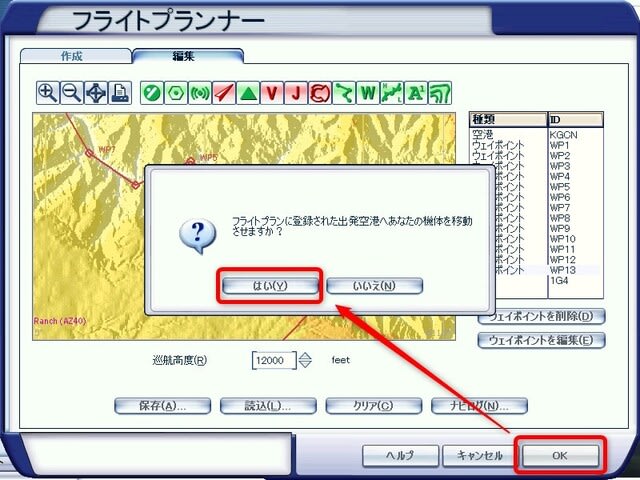 保存が終わったら元のフライトプランナー画面に戻るので、ここで「OK」を押すと「フライトプランに登録された出発空港へあなたの機体を移動させますか?」→「はい」→「今すぐ飛ぶ」で出発空港に移動します。
保存が終わったら元のフライトプランナー画面に戻るので、ここで「OK」を押すと「フライトプランに登録された出発空港へあなたの機体を移動させますか?」→「はい」→「今すぐ飛ぶ」で出発空港に移動します。

 この時、GPS画面を呼び出すと設定したフライトプランを確認する事ができます。
この時、GPS画面を呼び出すと設定したフライトプランを確認する事ができます。
 2Dコクピット画面で、NAV-GPSモードスイッチを下側の「GPS」に切り替えます。
2Dコクピット画面で、NAV-GPSモードスイッチを下側の「GPS」に切り替えます。
 滑走路を飛び立ってギアとフラップを格納したら、無線パネルを出して「AP」と「NAV」ボタンを押せば(キーボードでは「AP」は「Z」、「NAV」は「Ctrl+N」)飛行機はオートパイロットモードに移行しフライトプラン通りのルートで飛行を始めます。
滑走路を飛び立ってギアとフラップを格納したら、無線パネルを出して「AP」と「NAV」ボタンを押せば(キーボードでは「AP」は「Z」、「NAV」は「Ctrl+N」)飛行機はオートパイロットモードに移行しフライトプラン通りのルートで飛行を始めます。
2の現在位置はフライトプランナーで設定する出発地空港が自動的に設定されます。
この赤い線をマウスでドラッグしながら希望のルートを作り上げていきます。
任意の通過点(WP)の他に地図上に示されている空港、VORなども通過点として選定できます。







※コメント投稿者のブログIDはブログ作成者のみに通知されます