








この記事には、回路図が掲載されていますが、なんら動作を保証するものではありません。
参考にされる場合は、全てにおいて自己責任でお願い致しますぅ~<(_ _)>゛
********************************************************************************
以前、ギヤボックスの回転角度を電圧で制御するための基板ユニットを製作しました(・_・) (・_・ )ソーダネ
ギヤボックスをサーボモーターのように動かしてみました。 -その2-
その記事について「回路を教えてほしい」という旨のコメントをいただきましたので、今回、回路図を掲載することにしました。
<回路図>
オペアンプでウィンドウコンパレータを構成し、モータードライバーと組み合わせています。
(LEDは、動作を確認し易くするためのものなので、無くてもOK)
<原理>
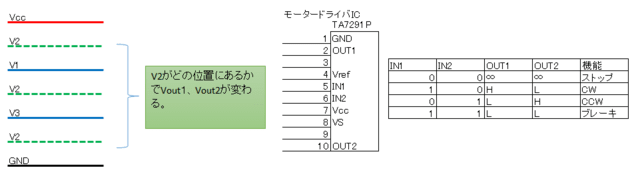
ウィンドウコンパレータの動きとしては、
① V1>V2>V3のとき、Vout1、Vout2はいずれもH。⇒モータードライバの出力は「L,L」でブレーキ。
② V2>(V1>V3)のとき、Vout1がL、Vout2はH。⇒モータードライバの出力は、「H,L」で回転。
③ (V1>V3)>V2のとき、Vout1がH、Vout2はL。⇒モータードライバの出力は、「L,H」で反転。
となります。
あとは、②や③のときにモータードライバに接続したギヤボックスで、VR2をV1>V2>V3となる方向に回転させるようにすれば良いわけです。
ウィンドウコンパレータを利用することで、モータードライバとのインタフェースも簡単で分かり易くなっていると思います。
さて、これを実現するにあたってポイントになるのは、V1とV3の差(ウィンドウ幅)を一定に保ったまま、VR1でV1,V3を共に変化させるという点でした。
ウィンドウ幅を狭くすれば追従性が良くなりそうですが、あまり狭いとギヤが惰性で回転する分を吸収できず、行ったり来たりを繰り返してしまう恐れがあります。
これをいかに簡単に実現するかということで、ダイオード(D2)を1本だけ使って、そのVF(順電圧)を利用するということをやってみたところ、結果としてはうまく動いたというわけです。
ただ、ダイオードのVFというのは、ある程度電流を流しているときは(概ね0.6Vで)一定とみなされることがありますが、電流が微小な時にはそうはいかないようなので、そんなに理想的な動きはしていないのだろうなと思っています。
計測をしていないので、想像の域を出ないのですけどねぇ ┐(・~・)┌
ちなみに、よりVFの小さなショットキーバリアダイオードやゲルマニュームダイオードでもやってみましたが、イマイチ安定しませんでした。
(書き忘れましたが、D1は、V1が0Vになることがないように、VF分底上げをするためのものです)
というわけで、以前の記事で回路図を掲載しなかったのは「もっと良い方法が無いだろうか」と思う部分があったからなんですよね~(。-`ω-)ンー
まぁ、ダイオード1本で実現できたのは事実ですから、簡易という点では上出来かも(^o^)b
この実験結果も、どこかの誰かの何かの参考になればと思います(・_・) (・_・ )ソーダネ
<おまけ>
実態配線図
最新記事
最新コメント
- かりおか/毛玉取り器の改造
- 優&魅衣/毛玉取り器の改造
- 優&魅衣/毛玉取り器の改造
- かりおか/毛玉取り器の改造
- w_kou/毛玉取り器の改造
- かりおか/毛玉取り器の改造
- w_kou/毛玉取り器の改造
- かりおか/ミニポンプの製作実験 その3 (ギヤポンプの自作)
- w_kou/ミニポンプの製作実験 その3 (ギヤポンプの自作)
- かりおか/穴あきスプーンを買いました。
カテゴリー
バックナンバー
カレンダー
プロフィール
-

- 自己紹介
- 普通の会社員です(^_^;
記事の内容は何ら保証できるものではありませんので、参考にされる場合は全てにおいて自己責任でお願い致しますぅ~<(_ _)>゛




