先日、筑波大学、早稲田大学の人力飛行機のテストフライトにお邪魔させていただきました!
人力飛行機のテストフライトは朝一番!風のないときに行われます。
かなり朝が早いので、私は前日夜より現地にて車中泊していました…。

人力飛行機の飛行準備にはかなりの時間がかかります。
皆さん、暗いうちから機体を組み立てたり等、テストフライトの準備を一生懸命されておられました。
この日は幸い天候も良く、問題なくテストが進行していきました。
今回の2チームは両方とも鳥人間大会の「タイムトライアル部門」参加の機体。
タイムトライアルとは、500メートル先のターンポイントを回っていかに早く戻ってこれるか、そのタイムを競う部門です。
言葉でいうのは簡単なんですが…。
人力飛行機はただ飛んでるだけでも目いっぱいの乗り物。
これを旋回させることは実はとんでもなく難しいことなのです!
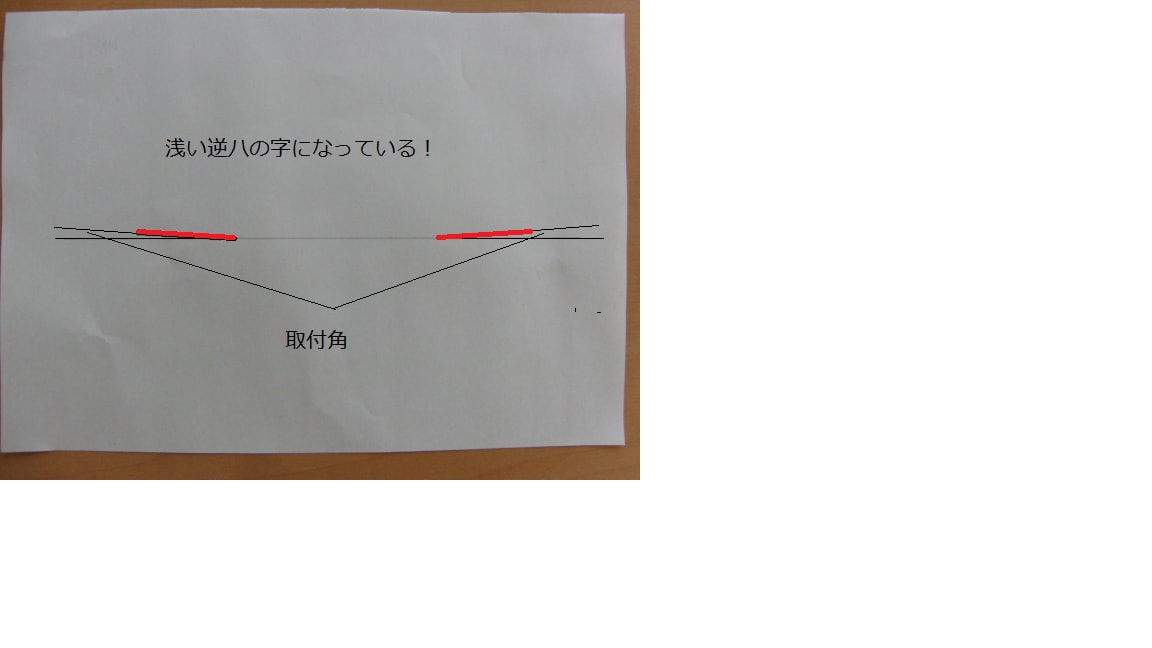
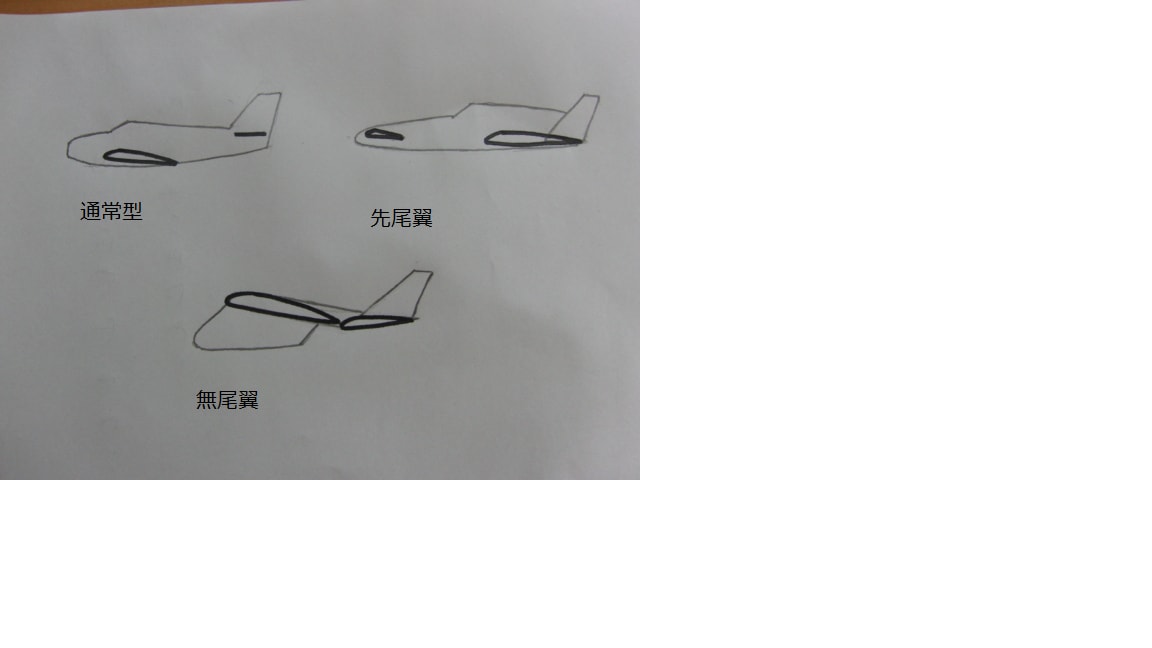
一般の飛行機にはエルロン(補助翼)というものがあり、これで機体をバンクさせて旋回します。
しかし、人力飛行機では翼が極めて弱いため、エルロンを使うといとも簡単に翼がねじれてしまい、エルロンリバーサルという思い
通りに旋回出来ない厄介な現象が起こってしまうのです!
そのため、普通の飛行機で使う方法が通用しないのです。
この問題をどう解決するか?
それがタイムトライアル部門の大半を占めていると言っても過言ではないくらいなのです。
今回の2機はそれぞれこの問題に対し、まったく違う手段で臨んでおられました。
テストフライトは緊張の中進められ、順調に貴重なデータがとられていきます。
皆さん緊迫しながらも、お互いに気を使われ、とても統率が取られた中進められます。
その動きは、何代も受け継がれてきた各大学の鳥人間部の方たちのノウハウが蓄積されているため、見ていても無駄や不足を感じることはありません。
完成された体制だと感じました。
人力飛行機が作られて行く段階で、学生の皆さんは多くのことを学んでいきます。
実はこうして実際に困難なものにチャレンジしていった学生の皆さんの経験が、今の日本の社会に少なからず影響していることを皆さんはご存知でしょうか?
例えば、日本の宇宙飛行士になられた方の中に、既に鳥人間大会の経験者が2名もいらっしゃいます。
その他にも、鳥人間大会で極限的な設計を学ばれた方の多くが社会の第一線で現在活躍されています。
私は、このことは注目すべき事実だと思います。
先日某大学のチームリーダーが私に話してくれた一言…。
「学校で習うCADなんかを使った設計についての授業。あんなので実際にモノが作れるわけがない!実際にトライして失敗して学ぶべき!」
この一言は、正直私、とても感動してしまいました。
まさに最も大事なことを言っていると思います。
鳥人間は各大学間がとても仲が良く、お互いの情報を交換しながら更に高い性能を持つ飛行機を作ろうと努力しています。
これだけ一生懸命になっている学生さんたちが、更にお互いの意見を交換しながら切磋琢磨している…。
近い将来、きっと素晴らしい飛行機が出来上がることでしょう。
ちなみに、今年の鳥人間大会は7月30日31日の2日間、琵琶湖の松原水泳場で行われます!