UNOを使ってステッピングモータをコントロールするスケッチについて復習していたのですが,回転スピードについてVRでコントロールできないか考えてました。
いろいろと調べるとステッピングモーター用のコンロールICがあるようですね。安かったので発注していますが,まだブツが届かない。

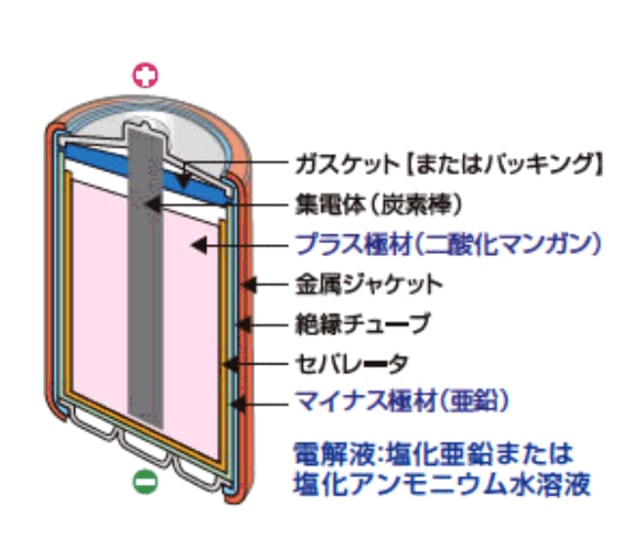
こんなモノのようです。AMAZONで¥795。小口なんで少し遊べそうです。

ピンアサインはこんな用で,Stepni信号を送り込めばいいみたいです。いろいろ見よう見まねで回路を考えて見ました。
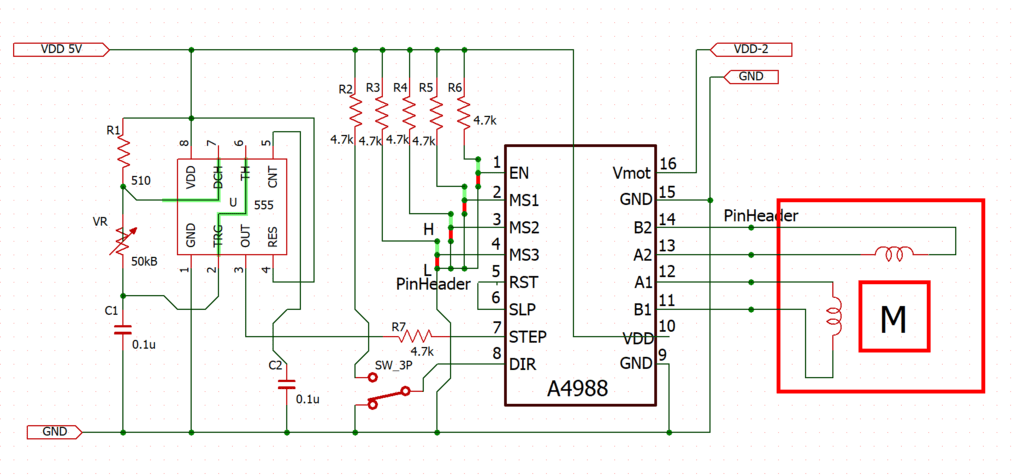
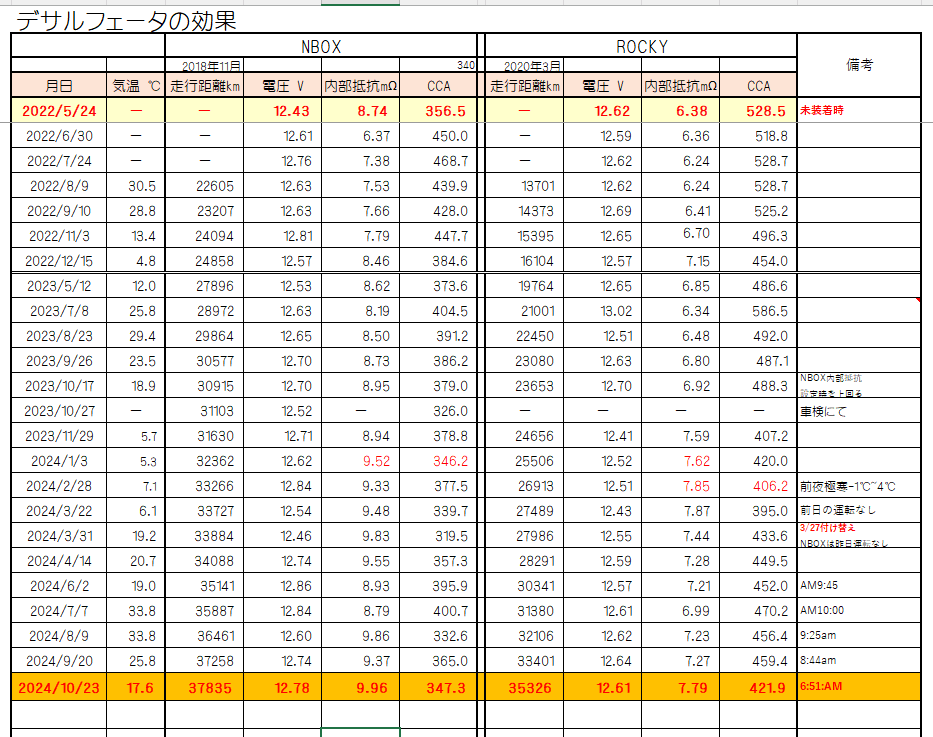
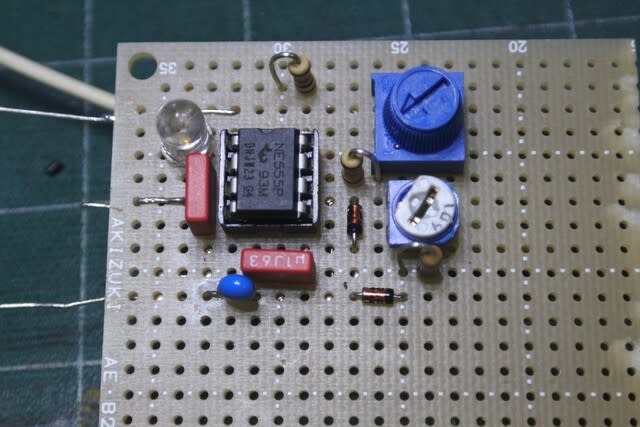
555を用いたコントロール回路。この図でモータへの接続はでたらめです。A9-A2,B1-B2とモータの配線に合わせて接続すべきです。直し忘れです。1~4pinはすべてHighでもいいみたいですね。DIRのスイッチはpinヘッダでも代替できる。手持ちがなかったらpinヘッダにします。
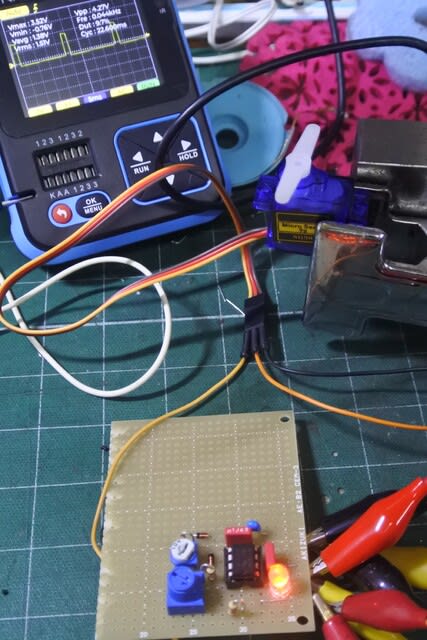
現物が届いたら取り組みましょう。何か問題があったらご指摘くださるとありがたいです。
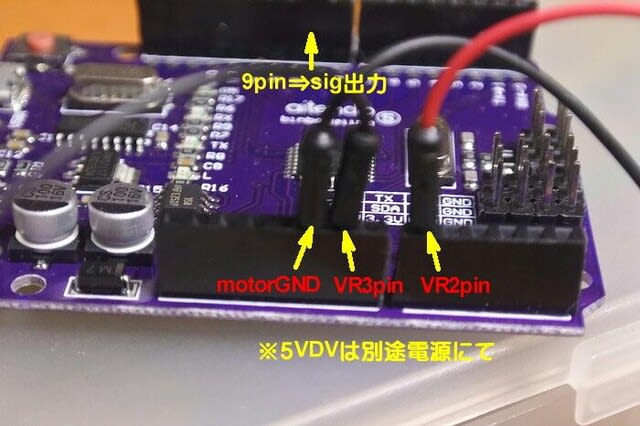
もう一つ妄想。UNOがいくつかあるので,Arduinoでもコントロールしてみたい。
こんなスケッチではどうなんでしょ?
const int stepPin = 3;
const int dirPin = 2;
const int potPin = A0;
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
digitalWrite(dirPin, HIGH); // 回転方向を設定(必要に応じて変更)
}
void loop() {
int potValue = analogRead(potPin); // 可変抵抗の値を読み取る
int delayTime = map(potValue, 0, 1023, 1000, 10); // 可変抵抗の値をステップ間の遅延時間にマップ
digitalWrite(stepPin, HIGH);
delayMicroseconds(delayTime);
digitalWrite(stepPin, LOW);
delayMicroseconds(delayTime);
}
//A4988とステッピングモーターの接続
//モーターの4本のワイヤーをA4988の出力ピンに接続(データシートで確認)。
//VDDをArduinoの5V、GNDをGNDに接続。
//STEPピンをArduinoのデジタルピン(例:ピン3)に接続。
//DIRピンをArduinoのデジタルピン(例:ピン2)に接続。
//可変抵抗とArduino
//可変抵抗の中央端子をArduinoのアナログピン(例:A0)に接続。
//他の2つの端子を5VとGNDに接続。
まだ構想の段階です