










彦根藩二当主である井伊直孝公をお寺の門前で手招き雷雨から救った
と伝えられる招き猫と井伊軍団のシンボルとも言える赤備え(戦国時
代の井伊軍団編成の一種、あらゆる武具を朱りにした部隊編成のこと
)と兜(かぶと)を合体させて生まれたキャラクタ-。

【季語と短歌:3月6日】
抱え込む春炬燵にもあさぼらけ 宇
高山 宇(赤鬼)
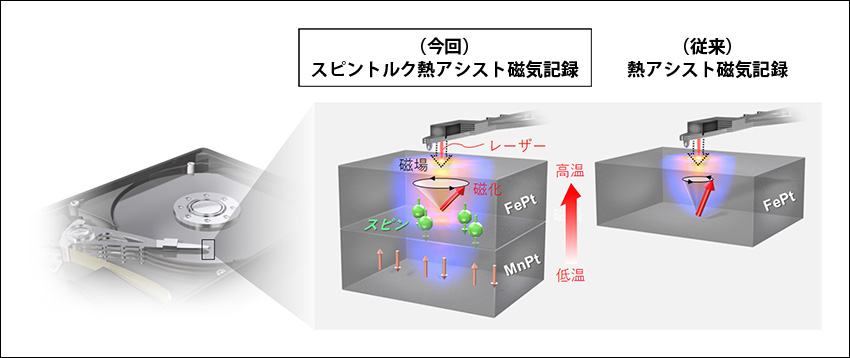
プレスリリースの図: スピントルク熱アシスト磁気記録の原理。レーザーによる加熱により
MnPt 層に温度差が生じ、それによってスピン(緑色矢印)が FePt 層に注入されます。 この
スピンはスピントルクを生み出し、磁化反転を補助します。従来の熱アシスト磁気記録で
は熱による磁化の変化のみが記録に寄与していましたが、本研究ではスピンが新たな磁化
制御の役割を果たす。
✳️スピントルク熱アシスト磁気記録
2月10日、NIMSは、米国Seagate Technology社との共同研究により、
従来の熱アシスト磁気記録にスピントルクを組み合わせることで、記
録効率を35%向上させる新たな記録原理を実証した。本研究により、
磁気記録時の熱エネルギー消費を削減し、HDDの耐久性と信頼性の
向上が期待できる。この成果は、1月13日付でActa Materialia誌に掲
載。
題目 : Thermal spin-torque heat-assisted magnetic recording
雑誌 : Acta Materialia
掲載日時 : 2025年1月13日
DOI : 10.1016/j.actamat.2025.120743
🌠 最新特許事例
特開2025-28573 電池用材料、電池用材料製造方法および電池用材料
製造システム 株式会社日本製鋼所(審査請求前)⓷
前回よりの続き
【0077】 以上、混練システム200の構成について説明した。
なお、混練システム200は上述の構成に加えて、図示しない温度制
御装置を含む。温度制御装置は、混練機230の内部に受け入れた樹
脂M20および導体M13を混練可能な状態に加熱する。温度制御装
置は、樹脂貯留部210を予熱する機能を有していてもよい。
【0078】 次に、図8を参照して第3工程ブロック30において混
練システム200が実行する処理について説明する。図8は、第3工
程ブロック30の処理を示すフローチャートである。
図8 第3工程ブロックの処理を示すフローチャート
【0079】第3工程ブロック30を操作する操作者はまず、混練機
230の温度を制御し(ステップS21)、さらに駆動装置240を
起動させて混練スクリュ241を駆動する(ステップS22)。
【0080】次に、操作者は、導体M13および樹脂M20を混練機
230にそれぞれ供給する(ステップS23)。これにより、操作者
は、混練機230に導体M13と樹脂M20とを混練させる(ステッ
プS24)。換言すると、混練機230は、導体M13と樹脂M20
とをそれぞれ受け入れ、これらを設定された温度環境下において混練さ
せつつ、下流へ搬送する。
【0081】次に、操作者は、混練機230からギヤポンプ245を
介して混練物を造粒機250に供給させる(ステップS25)。造粒
機250は、混練機230から受け取った混練物を粒状に加工するこ
とにより導電性樹脂M21を製造し、この導電性樹脂M21を送出す
る(ステップS26)。送出された導電性樹脂M21は容器260に
回収される。
【0082】以上、第3工程ブロック30について説明した。第3工
程ブロック30にかかる電池用材料製造方法は、無担持触媒M10に
繊維状ナノ炭素M15を成長させた導体M13と、この導体M13と
混練するための樹脂M20と、のそれぞれを混練機230に供給する
処理を含む。また電池用材料製造方法は、混練機230の混練スクリ
ュ241により導体M13および樹脂M20を混練して混練物を生成
し、生成した混練物を電池用材料として送出する処理を含む。これに
より、電池用材料製造方法は、担体を含まない導体を用いて好適な導
電性を有する電池用材料を製造できる。
【0083】なお、上述の混練システム200は混練スクリュ241
として二軸スクリュを有していることが好ましい。すなわち上述の電
池用材料製造方法において、混練機230は、混練スクリュ241と
して二軸スクリュにより混練を行う処理を有することが好ましい。こ
れにより、電池用材料製造システム1は、繊維長が0.5~30マイ
クロメートルの繊維状ナノ炭素を解繊して分散性を高め、3次元的に
導電パスを有する電池用材料を製造できる。すなわち、電池用材料製
造システム1は、好適な導電性を有する電池用材料を連続的に効率よ
く製造できる。
図9 第4工程ブロックにかかる成形システムの概要構成図
【0084】次に、図9を参照して第4工程ブロック40について説
明する。図9は、第4工程ブロック40にかかる成形システム300
の概要構成図である。第4工程ブロック40は、第4工程ブロック40
を実行する成形システム300を有している。成形システム300は、
混練システム200が製造した導電性樹脂M21をシート状に成形す
る。成形システム300は主な構成として、ペレット貯留部310、
押出機320、Tダイ330、キャストブロック370、延伸ブロッ
ク360、圧延ブロック340を有している。
【0085】
ペレット貯留部310は、混練システム200が製造した導電性樹
脂M21を押出機320に供給可能に貯留する。ペレット貯留部310
は、混練システム200が製造した混練物を受け入れるための混練物
供給口ということもできる。押出機320はペレット貯留部310か
ら供給される導電性樹脂M21を加熱することにより成形可能に軟化
させ、スクリュにより押し出し、圧送部321に供給する。圧送部
321は例えばギアポンプを有し、軟化した導電性樹脂M21をTダ
イ330に供給する。押出機320は好ましくは二軸押出機である。
【0086】
Tダイ330は、シート成形機の一実施態様である。Tダイ330
は、圧送部321から供給された導電性樹脂M21を受け入れてシー
ト状の導電性シートM31を連続的に送出する。このときTダイ33
0が送出するシートの厚みは例えば0.3ミリメートルから3ミリメ
ートル程度である。
【0087】Tダイ330は主な構成として、展伸部および送出部を
有している。展伸部は、受け入れた混練物を送出方向の直交方向に展
伸させつつ送出方向に案内する。送出部は、展伸部から送出方向に案
内された混練物を連続して送出可能なスリット状の開口部である。上
述の構成を有することにより、シート成形機であるTダイ330は
、シート状の電池用材料を生成できる。すなわち、Tダイ330は、
シート状の厚み方向における体積抵抗が1.0×106Ω・m未満の電
池用材料を製造する。あるいはTダイ330は、シート状の厚み方向
における体積抵抗が1.0×103Ω・m未満の電池用材料を製造する。
【0088】 キャストブロック370は主な構成として、キャスト
ローラ371、回転駆動部372、変位駆動部373および駆動制御
部374を有している。
【0089】 キャストローラ371は、回転駆動部372により回転
するローラである。キャストローラ371は、回転しながら、Tダイ
330から送出された高温状態かつ流動性を有するシート状の電池用
材料をローラ表面に受けて冷却しながら延伸しつつ、次の工程に送り
出す。このとき、キャストローラ371の表面における周速度は、T
ダイ330から送出された電池用材料の送出速度より速くなるように
設定されている。これにより、キャストローラ371は、電池用材料
を冷却しながら延伸できる。
【0090】回転駆動部372は、駆動制御部374の指示に応じて
キャストローラ371を回転させる。回転駆動部372はキャストロ
ーラ371を回転させるためのモータや、キャストローラ371の回
転速度を測定するためのセンサ等を有している。
【0091】変位駆動部373は、図のZ軸方向(すなわち上下方向
)および図のX軸方向(すなわち水平方向、あるいはシート状に送出
される電池用材料の厚さ方向)に、キャストローラを変位させる。よ
り具体的には変位駆動部373は例えばZ軸方向とX軸方向のそれぞ
れに沿って移動可能なリニアレールと、リニアレールに係合し、キャ
ストローラを支持する軸受けと、この軸受けをリニアレールに沿って
駆動するモータと、を含む。変位駆動部373は、駆動制御部374
から制御信号を受けてキャストローラ371を変位させる。
【0092】 駆動制御部374は、回転駆動部372と変位駆動部
373とをそれぞれ駆動する駆動回路と、回転駆動部372および変
位駆動部373から受け取るキャストローラ371の回転速度やキャ
ストローラ371の位置に関するデータに応じて回転駆動部372と
変位駆動部373とをそれぞれ駆動する演算回路と、を含む。
【0093】上述の構成により、キャストブロック370は、Tダイ
330から送出された高温状態かつ流動性を有する状態の電池用材料
を冷却しつつ、延伸する。なお、キャストブロック370は、電池用
材料の温度を調整するための温度制御部を有していてもよい。
【0094】延伸ブロック360は主な構成として、張力センサ361、
延伸ローラ362、回転駆動部363、変位駆動部364および駆動
制御部365を有している。
【0095】 張力センサ361は、シート状の電池用材料が受ける
張力を測定する。より具体的には、張力センサはTダイ330と延伸
ローラ362との間に介在し、電池用材料にかかる引っ張り方向の力
を張力として測定する。張力センサ361は測定した張力に関するデ
ータを、駆動制御部365に供給する。
【0096】延伸ローラ362は、キャストブロック370から送出
されたシート状の電池用材料を牽引して繰り出すローラである。延伸
ローラ362の回転は回転駆動部363により駆動されている。また
延伸ローラ362の位置は、変位駆動部364により設定されている。
【0097】回転駆動部363は、キャストブロック370の送出速
度より速い速度により電池用材料を送出方向に送出するよう延伸ロー
ラ362を駆動する。回転駆動部363は、駆動制御部365から制
御信号を受けて回転駆動するモータおよび減速機等を含む。
【0098】変位駆動部364は、延伸ローラ362を変位させる。
より具体的には変位駆動部364は例えばリニアレールと、リニアレ
ールに係合し、延伸ローラ362を支持する軸受けと、この軸受けを
リニアレールに沿って駆動するモータと、を含む。変位駆動部364
は、駆動制御部365から制御信号を受けて延伸ローラ362を変位
させる。
【0099】駆動制御部365は、回転駆動部363と変位駆動部3
64とをそれぞれ駆動する駆動回路と、張力センサ361から受け取
る張力に関するデータに応じて回転駆動部363と変位駆動部364
とをそれぞれ駆動する演算回路と、を含む。駆動制御部365は、張
力に応じて延伸ローラ362の回転速度を調整する。また駆動制御部
365は、張力に応じて、変位駆動部364に延伸ローラ362を変
位させる。これにより延伸ブロック360は、電池用材料に過度な張
力が掛かることを抑制しつつ、電池用材料を延伸する。
【0100】上述の構成により、延伸ブロックは、キャストブロック
370から送出された電池用材料を延伸しつつ、次の圧延ブロック3
40に送出する。
【0101】 圧延ブロック340は、延伸ブロックが送出したシー
ト状の導電性シートM31をさらに圧延して厚みを薄く加工する。
圧延ブロック340は、主な構成として、第1圧延装置341、第2
圧延装置342および第3圧延装置343を含む。第1圧延装置34
1は、圧延ローラにより導電性シートM31の表裏を挟み、導電性シ
ートM31を圧縮しながら送出する。
【0102】第1圧延装置341は圧延した導電性シートM31を第
2圧延装置342に供給する。第2圧延装置342は第1圧延装置
341が送出した導電性シートM31をさらに圧延し、圧延した導電
性シートM31を第3圧延装置343に供給する。第3圧延装置34
3は第2圧延装置342が送出した導電性シートM31をさらに圧延
し、次の工程に送出する。圧延ブロック340は、上述の構成に加え
て、加熱装置をさらに有していても良い。また圧延ブロック340は、
圧延装置を1台以上有していればよい。圧延ブロック340は、延伸
ブロックから受け取った導電性シートM31の厚さを、例えば0.05
ミリメートルから0.03ミリメートル程度に圧延する。
【0103】 以上、成形システム300について説明した。成形シ
ステム300は、圧延ブロック340の後工程において、導電性シー
トM31を裁断する工程をさらに有していても良い。あるいは成形シ
ステム300は、圧延ブロック340の後工程において、電池用材料
である導電性シートM31を巻き取る手段をさらに有していてもよい。
【0104】 圧延ブロック340は、加熱装置を併せて有していて
もよい。圧延ブロック340が導電性シートM31の温度を制御しな
がら圧延することにより、導電性シートM31は導電性フィラーの機
能を維持したまま圧延できる。
図10 第4工程ブロックの処理を示すフローチャート
【0105】 次に、図10を参照して第4工程ブロック40におい
て成形システム300が実行する処理について説明する。図10は、
第4工程ブロック40が実行する処理を示すフローチャートである。
【0106】 第4工程ブロック40を操作する操作者はまず、成形
システム300の温度を制御し(ステップS31)、さらに成形シス
テム300の駆動部を駆動開始する(ステップS32)。成形システ
ム300の駆動部とは例えば押出機320のスクリュ、圧送部321
のポンプ、キャストブロック370のキャストローラ371、延伸ブ
ロック360の延伸ローラ362、あるいは圧延ブロック340の圧
延ローラ等である。
【0107】 次に、操作者は、導電性樹脂M21を押出機320に
供給する(ステップS33)。これにより、操作者は、Tダイ330
に導電性シートM31を送出させる(ステップS34)。換言すると、
押出機320は、導電性樹脂M21を受け入れ、これを設定された温
度環境下において軟化させつつ、Tダイ330に供給する。Tダイ
330は、受け取った導電性樹脂M21をシート状にして送出する。
【0108】 次に、操作者は、圧延ブロック340に導電性シートM
31をキャストブロック370、延伸ブロック360、圧延ブロック
340の少なくともいずれかのブロックでの処理を実行する(ステッ
プS35)。すなわち操作者は、Tダイ330が送出した導電性シー
トM31の厚さをさらに薄くする。
【0109】 以上、第4工程ブロック40において成形システム3
00が実行する処理について説明した。上述のとおり、第4工程ブロ
ック40における電池用材料製造方法において、成形システム300
は、押出機320から送出された導電性樹脂M21をシート成形機で
あるTダイ330に投入してシート状の電池用材料を連続成形する。
ここで、シート状の電池用材料は厚みが0.01mm~3mmであっ
て、幅方向が100mm以上である。またシート状の電池用材料は、
無担持触媒にナノ炭素を成長させることにより生成された導体M13
を5~90重量パーセントの割合で含んでいる。これにより、電池用
材料製造システム並びに電池用材料製造方法は、好適な導電性を有す
る電池用材料を効率よく製造できる。
【0110】以上、実施の形態1について説明した。電池用材料製造
システム1は、導電性の高い電池用材料を、連続的に効率よく成形で
きる。また電池用材料製造システム1は、均質な電池用材料を連続し
て成形できる。よって、実施の形態1によれば、電池用材料を連続し
て効率よく製造できる電池材料製造装置等を提供できる。
図13 反応システム100Bが有する複数の領域を示す図
【0111】 <実施の形態2>
次に、実施の形態2について説明する。図11は、実施の形態2に
かかる反応システム100Bの構成図である。図11に示す反応シス
テム100Bは、図4に示した反応システム100の一部を拡大した
ものである。反応システム100Bは、スクリュ140Bが以下の構
成を有する。
【0112】スクリュ140Bは、反応炉110Bの延伸方向に沿っ
て延伸する軸部142と、軸部142の外周に設けられたフライト部
143とを有している。フライト部143は、スクリュ140Bの軸
部の外周に立設する部材である。フライト部143は軸部142の周
囲に螺旋状に形成された板状部材であってもよい。この様な構成によ
り、フライト部143は、軸部142が回転することにより反応炉
110B内の処理対象を下流へ搬送する。なお、フライト部143は
1つの連続した部材により形成されていてもよいし、2条ねじのよう
に、複数の螺旋状の部材により形成されたものであってもよい。また
フライト部143は断続的に螺旋状に形成されたものであってもよい。
【0113】 本実施の形態にかかるフライト部143は、少なくと
も一部に複数の穴を有する捕捉部材144を含む。捕捉部材144は、
無担持触媒M10を一時的に捕捉可能な構造となっている。捕捉部材
144の構造は例えば、複数の穴を有する網目構造である。この場合、
網目の穴は、無担持触媒M10が引っかかり、且つ、解放可能な程度
の大きさを持つ。より具体的には、網目の穴の空間部の大きさは、20
~1000マイクロメートルの範囲であることが好ましく、100~
300マイクロメートルの範囲であることがさらに好ましい。
【0114】網目を構成する部材は、酸化物や窒化物のコーティング
等の表面処理が施されていることが好ましい。これにより、無担持触
媒M10が網目に固着するのを防止できる。網目の形状は、四角形で
もよいし、円形でもよいし、それ以外の形でもよい。なお、酸化物と
は、例えばアルミナやジルコニアである。また、窒化物とは、例えば
窒化チタンや窒化ホウ素である。
【0115】 上述の構造を有することにより、フライト部143に
捕捉された無担持触媒M10は、無担持触媒M10の表面の一部に反
応ガスが接触する状態となる。これにより無担持触媒M10は、反応
ガスが接触する部分にナノ炭素が成長するための起点を生じやすくな
る。これにより反応システム100Bは、無担持触媒M10の表面に
生じるナノ炭素の成長の起点が分散するのを抑制する。すなわち反応
システム100は、電池用材料として好適な導体M13を製造できる。
【0116】
またフライト部143の捕捉部材144が網目構造を有することに
より、反応炉110Bの通気性が向上する。そのため例えば、第3流
体供給口181から供給される流体は、網目の穴を通過して第3流体
排出口183に流れやすくなる。これにより、フライト部143は、
捕捉した無担持触媒M10を解放し易くなる。なお、無担持触媒M10
の表面にナノ炭素が成長すると、捕捉部材144の網目にナノ炭素が
絡みやすくなる。このため、捕捉部材144の網目の大きさは、反応
炉110の下流側ほど大きくなっていることが好ましい。
【0117】 上述の構造を有することにより、反応システム100B
は、反応炉110Bにおいて複数の無担持触媒M10が互いに部分的
に焼結する現象(ネッキング)が生じるのを抑制できる。すなわち本
実施の形態にかかる反応システム100は、処理対象の反応効率の低
下を抑制できる。
図12 実施の形態3にかかる反応システムの構成図
【0118】 <実施の形態3>
次に、実施の形態3について説明する。図12は、実施の形態3に
かかる反応システム100Bの構成図である。図12に示す反応シス
テム100Bは、図4に示した反応システム100の一部を拡大した
ものである。反応システム100Bは、スクリュ140Bが以下の構
成を有する。
【0119】 スクリュ140Bは、軸部142、フライト部143
および邪魔板146を有している。この内、邪魔板146は、フライ
ト部143の異なる位置を橋渡しするように形成された部材である。
図12に示す邪魔板146は、反応炉110Bの延伸方向に沿って、
フライト部143の異なる位置を橋渡しするように形成されている。
また邪魔板146は、軸部142の外周面から軸部142の径方向に
沿って反応炉110Bの内壁側へ向かって形成されている。
【0120】邪魔板146は、少なくとも一部に複数の穴を有する捕
捉部材144を含む。捕捉部材144は、無担持触媒M10を一時的
に捕捉可能な構造となっている。捕捉部材144の構造は例えば、複
数の穴を有する網目構造である。この場合、網目の穴は、無担持触媒
M10が引っかかる程度の大きさを持つ。より具体的には、網目の
穴の空間部の大きさは、20~1000マイクロメートルの範囲であ
ることが好ましく、100~300マイクロメートルの範囲であるこ
とがさらに好ましい。
図13 反応システム100Bが有する複数の領域を示す図
【0121】 図13を参照して、本実施の形態にかかる反応システム
100について更に説明する。図13は、反応システム100Bが有
する複数の領域を示す図である。図13に示す反応システム100B
は、理解を容易にするため構成の一部が省略されている。反応システ
ム100Bは、反応炉110Bの延伸方向に沿って、上流側から、予
熱領域Z10、反応領域Z20および冷却領域Z30を有している。
【0122】予熱領域Z10は、供給口111B近傍から第3流体供
給口181の手前までである。予熱領域Z10では、供給口111B
から受け入れた無担持触媒M10を徐々に加熱しながら下流へ搬送す
る。
【0123】 反応領域Z20は、第3流体供給口181付近から第4
流体排出口193付近までである。反応領域Z20は、スクリュ14
0Bが邪魔板146を有している。反応システム100Bは、この反
応領域Z20において、無担持触媒M10に低級炭化水素などの流体
を接触させ、ナノ炭素の成長を促す。
【0124】反応領域Z20においてスクリュ140Bが邪魔板146
を有することにより、スクリュ140Bは、反応炉110Bの底部に
無担持触媒M10が停滞するのを抑制する。すなわち邪魔板146は、
反応炉110Bの無担持触媒M10を一時的に掻き上げる。これによ
り反応システム100Bは無担持触媒M10の反応効率を向上させる。
【0125】また邪魔板146が捕捉部材144を有することにより、
邪魔板146は好適に無担持触媒M10を掻き上げるとともに、無担
持触媒M10を捕捉する。また捕捉部材144が網目構造となってい
ることにより、反応領域Z20は、邪魔板146により流体の流動性
が低下するのを抑制する。
【0126】さらに、邪魔板146の捕捉部材144は、上述のとお
り、捕捉した無担持触媒M10の表面の一部に反応ガスが接触する状
態とする。これにより捕捉された無担持触媒M10は、反応ガスが接
触する部分にナノ炭素が成長するための起点を生じやすくなる。これ
により反応システム100Bは、無担持触媒M10の表面に生じるナ
ノ炭素の成長の起点が分散するのを抑制する。すなわち反応システム
100は、電池用材料として好適な導体M13を製造できる。
【0127】 冷却領域Z30は、反応領域より下流側であって、第
4流体排出口193付近から送出口112B近傍までである。冷却領
域Z30は、反応領域において生成された導体M13を冷却しながら
下流に搬送し、送出口112Bに送り出す。
【0128】 次に、図14を参照して、捕捉部材144と流体の流
れとの関係について説明する。図14は、第3流体供給口181の流
体の流れを説明するための図である。図14は、反応炉110Bにお
ける第3流体供給口181の断面を拡大したものである。
図14 流体供給口の流体の流れを説明するための図
【0129】 図14に示す第3流体供給口181は、反応炉110B
の内壁側が直径D11である。また第3流体供給口181は、反応炉
110Bの内壁から外壁へ向かって徐々に直径が大きくなり、外壁側
は、直径D12となっている。ここで直径D11は例えば直径D12
の70パーセント~30パーセントである。このように、第3流体供
給口181における内壁側の吐出口の直径が小さくなることにより、
第3流体供給口181は流体の吐出速度を速くすることができる。
【0130】 図14は、第3流体供給口181の下方に、捕捉部材1
44が示されている。この捕捉部材144は、フライト部143の一
部であってもよいし、邪魔板146の一部であってもよい。捕捉部材
144は、第3流体供給口181が吐出した流体を受ける。このとき、
捕捉部材144が無担持触媒M10を捕捉していた場合には、吐出さ
れた流体により、無担持触媒M10は捕捉部材144から離脱する。
【0131】 このように、本実施の形態にかかる反応システム100
は、流体供給口の直径が、吐出部において、先端側ほど小さく形成さ
れており、流体供給口の吐出部の周辺に捕捉部材144が設けられて
いる領域を有している。これにより、反応システム100は、捕捉部
材144が捕捉した無担持触媒M10を好適に解除させる。
【0132】 なお、図14は一例として第3流体供給口181を示
して説明したが、同様の構成は、第4流体供給口191においても適
用できる。
【0133】以上、実施の形態によれば、導電性に優れる電池用の材
料、電池用材料の製造方法および電池用材料の製造システムを提供で
きる。
【0134】以上、実施の形態を参照して本願発明を説明したが、本
願発明は上記によって限定されるものではない。本願発明の構成や詳
細には、発明のスコープ内で当業者が理解し得る様々な変更をするこ
とができる。
この項つづく
🏈 コメ価格は5キロ当たり4000円に迫まる米価
1.9倍の裏で 農水官僚28人がJA関連団体に“天下り”していた.
(政府の備蓄米を放出する方針©時事通信社「週刊文春」)
✳️ 伊方原発3号機、運転差し止め認めず
住民側の請求棄却 広島地裁
◾「訴え届かず」と書かれた紙を掲げる原告団の関係者=広島市中区
で2025年3月5日午後2時5分(毎日新聞)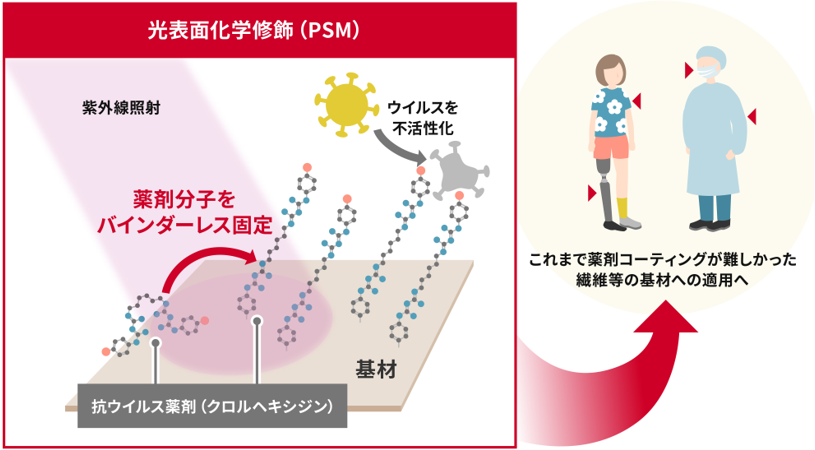
抗ウイルス性ナノコーティング技術の開発
⛑️繊維やシートにも短時間で抗ウイルス薬剤をコーティング

COVID-19などの影響によって、抗ウイルスコーティングの需要が高
まっていいるが、既存技術は基材へのダメージの懸念や意匠性への影
響があり、適用可能な基材の表面化学構造や基材自体に制約が多いの
が現状。
今回開発した光表面化学修飾(PSM:Photochemical Surface Modi-
fication)による表面改質技術は、温和な条件で分子の化学構造を維
持しつつ、基材表面に直接化学修飾(化学固定)ができる。この技術
により、安全かつ短時間で抗ウイルス薬剤をコーティングできる。実
証試験の結果、インフルエンザウイルスに対する不活性化効果が2カ
月間程度持続することを確認。
この技術は、フィルム状部材から繊維部材まで幅広い基材へ直接適用
が可能で、薬剤の溶出を伴わずに抗ウイルス効果が発現するため、粘
膜や傷口に長時間接触するような用途でも安全に使用できます。将来
的にはマスクや医療用ガウンなど繊維へのコーティング、壁紙など建
材への適用が期待できる。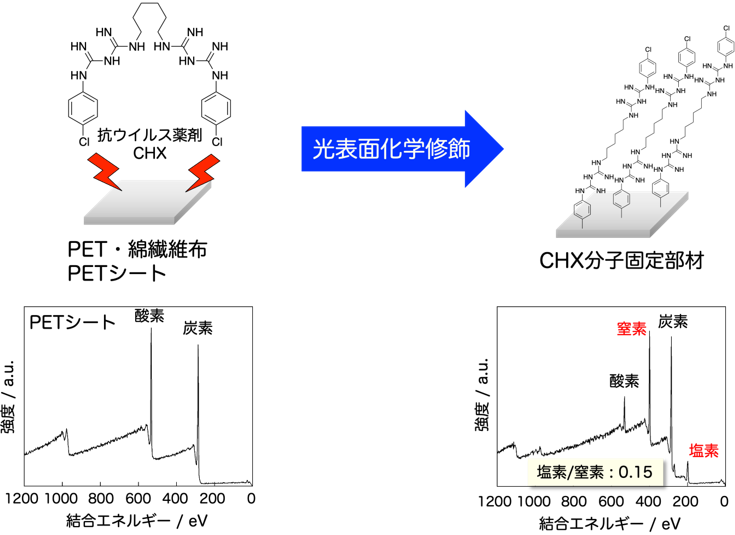
図2 (上)光表面化学修飾によるCHX固定部材の作製 (下)基材お
よび固定部材のXPSスペクトル
就実大学においてCHX固定部材の繊維製品抗ウイルス性試験(IS
O 18184)および非繊維製品の抗ウイルス性試験(ISO 21702)を
行い、抗ウイルス活性値(R)を算出したところ、インフルエンザ
ウイルスに対してそれぞれ99.9%以上、99.99%以上と非常に高い不
活性化率を示しました(表1)。
表1 CHX固定部材のISO規格による抗ウイルス試験結果
CHX固定PETフィルムについては就実大学内にて実証試験を実施。透
明性が維持されるため意匠性を損なわないこと(図3左)と、現時点
では実使用下において2カ月間の持続性があることを確認している(
図3右)。
⛑️地雷を掘り出す
圧縮空気を遠隔操作で地面に吹き付け
産業機械製造「アネスト岩田」=横浜市港北区=と、地雷除去ロボッ
トを手がけるスタートアップ「IOS」=東京都新宿区=は5日、地雷除
去装置を共同開発し、3台を世界各地で除去に取り組む英国の非政府
組織(NGO)ヘイロー・トラストに寄贈した。ロシアの侵攻が長期化
しているウクライナでの活用を念頭に置く。装置は長さ2.7メートル、
幅1メートル、高さ1.6メートル、重さ800キロ。圧縮空気を遠隔操作
で地面に吹き付け、地中の地雷を掘り出す。最終的な処理は別の手段
となるが、どこにあるか分からない地雷を人力で探し、掘り出す危険
は避けられる。山林や丘陵地など不整地でも走行できる。
● 今日の言葉:トランプが当選した理由を考えてみよう。


春が来ても、鳥たちは姿を消し鳴き声も聞こえない。
春だというのに自然は沈黙している。
レイチェル・カーソン 『沈黙の春』

![]()
















※コメント投稿者のブログIDはブログ作成者のみに通知されます