








先日の茨城ノード大会で、レスキュー競技が終わった後に、レスキューチームが集まって技術交流会を開催しました。
その中で、何かお話をしてください・・・と言われていたので・・・
M&Yの昔の(2008年の)ロボットを持っていきました。
これが・・・2008年に世界第二位になったロボットの残骸です。(笑)
写真の右側のRCXのヤツです。

ロボットを見せて、最初に誰しも感じるのが「小さい」ですよね。
レスキューのロボットは「小さいこと」が有利になります。(あくまで、当時のチームの考えです)
それから、低重心ですね。
次に説明したのが、このバンパー
「LINK」のロボットのダブルバンパーにあこがれて、試行錯誤して作ったM&Y方式のダブルバンパーです。
前からのタッチはもちろん、横からのタッチも検知できます。
これがあれば、「LINK方式」での障害物回避ができるので、障害物回避の成功率が高くなります。

それから、ロボットの下側を見せました。
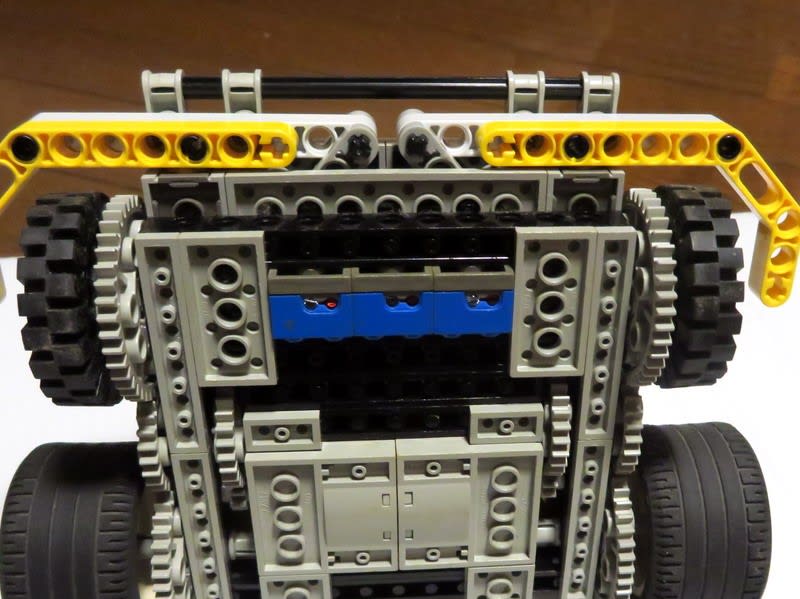
この3つ並んだ光センサーです。
最近のロボットは2つの光センサーでライントレースをするのが普通のようですが・・・それだと、黒線の上を進んでいるのか、ギャップに入っているのかが分かりません。
この3つの光センサーが、ライントレースに大変役立ちました。
そしてこれは、交流会の時に言うのを忘れましたが・・・光センサーの設置されている位置について・・・
M&Yのロボットは、前輪の間に設置しています。
こうすると、傾斜路の始まりや終わり、スピードバンプを乗り越える時も、地面とセンサーの間の距離がほとんど変化しません。
ただ、今のNXTやEV3の光センサーは巨大なので、このように配置するのは難しいですね。
最後に、車検(インタビュー)の時に感じたことを(昨年と同様ですが)話しました。
ロボットが完成していないチームが多いです。
・ハード制作に時間がかかったので、プログラムが殆ど完成していない。
・プログラムもやっとできたけど、調整が終わっていない。
・まだ、組み立てが終わっていないので、本日の競技時間までには作る・・・(それはダメだろう)
ということで、(総合的な観点で)ロボットが完成していません。
ハードもソフトも作り終えて、何度も練習して、完成(熟成)させたロボットで競技会に臨んで欲しいです。
ところで・・・持っていた2008年のロボットですが・・・光センサーのケーブルが劣化してボロボロです。

これ、どうにかなりませんか・・・ねぇ。
(ケーブルを交換するとか)






