








12月24日(一部23日)に開催されたRCJJ関東ブロック大会の結果が掲載されていました。
https://rcjj-kanto.org/result/kanto.html

順位や写真、成績もあって、素晴らしいですね。
ということで、今年はあと数時間で終わりです。
また、来年も、よろしくお願いします。
12月24日(一部23日)に開催されたRCJJ関東ブロック大会の結果が掲載されていました。
https://rcjj-kanto.org/result/kanto.html
順位や写真、成績もあって、素晴らしいですね。
ということで、今年はあと数時間で終わりです。
また、来年も、よろしくお願いします。
ロボカップ2017 名古屋 のHPに半年前イベントというのが掲載されていました。

内容は・・・もっと、ロボカップのデモなどをやるのかと思ったら、そうでもないみたい。
(ということで、あんまり、ロボカップとは関係ないみたい・・・)
今度は、前席のドアに付いている、カーテシーランプを交換してみました。
これまで、「カーテシー」という言葉は聞いたことがありませんでした。
スペルは Courtesy なので、辞書で調べて見ると・・・礼儀正しい、ていねい、親切、という言葉が並んでいます。どうも、ホテルなどで送迎などのサービスを指す意味もあるようです。
ということで、クルマを使う人へのサービス(役に立つ)灯りの意味なのでしょうね。
で・・・このランプを何に替えたかと言うと・・・

こんなのになりました。
ドアを開けると、地面に「PRIUS」の文字が投影されます。
家族も含めて、初めて見る人は・・・「何?これ!」と驚くのが・・・
何か、ちょっと、楽しいです。
本当は、「PRIUSα」というのもあったのですが・・・高かったので・・・
(実際は、この「PRIUS」が、めっちゃ安かった!)
これで、充分満足してます。
RCJJ関東ブロック大会2017でのレスキューメイズのロボット
レスキューメイズの2016年ルールから、スピードバンプが高さ2cm(直径2cmではなく、高さ!)になり、瓦礫(これまでは楊枝や竹ひご)が直径1cmの棒になりました。
つまり、イメージ的には、これまでのスピードバンプが、そのままフィールドに(固定されずに)ゴロゴロしていることになります。
そうすると、もう普通のタイヤではダメで、何らかの対策が必要になってきます。
さて、そんな中で進化を遂げたロボット達
まずは、team "玉川サイエンス"

これを見た時・・・えっ~、mini Rescue 用のロボット!! と、まじめに思いました。
アームクローラーが付いていて、これならどんな瓦礫も越えられそうです。
将来的には、レスキューメイズは、メジャーレスキューに近づいていく(障害物競走になっていく)らしいので、どんどんメジャーのレスキューロボットのような構造に変わっていくのでしょうかねぇ。
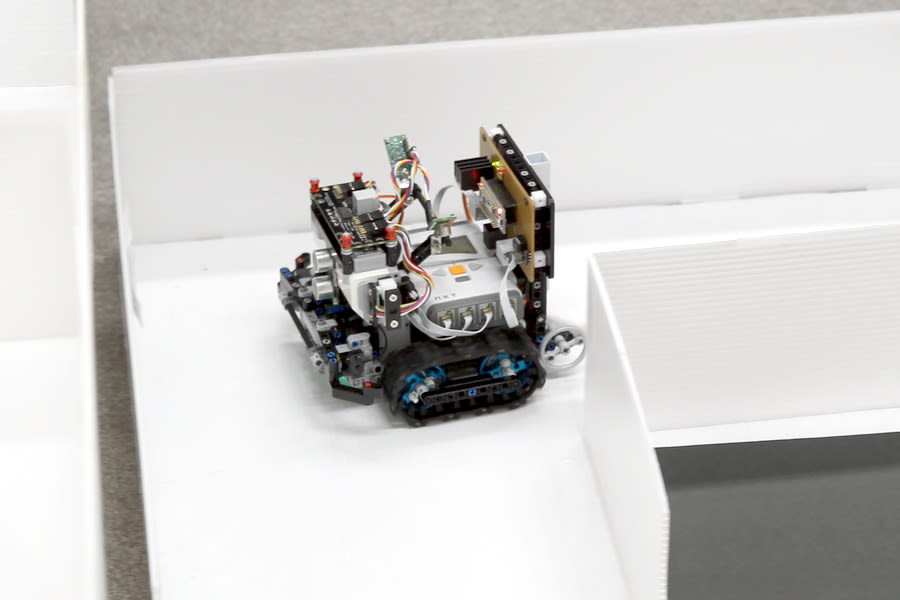
次は、team"まくみらん"
渋幕のチームらしく、偉人の名前シリーズです。
マクミランと言えば・・・あれっ、それ誰!? 私は知りません。
経済学者のハロルド・マクミランなのかなぁ・・・
これまでは、理学、工学系の偉人名だったけど・・・
(ググったら・・・おそらく Edwin Mattison McMillan この人のことでしょう)
まあいい、とにかく、このロボットのクローラーが素晴らしいです。
これで、2cmのスピードバンプも乗り越えられるそうです。
そして、それを駆動するのがステッピングモーターで、それをクローラに直結するという漢らしさ!!
駆動系とは関係ありませんが・・・被災者を発見するための温度センサーは SPU-100 という・・・代々引き継がれて来たモノを搭載しています。
これぞ、しぶまくロボットの正統派ロボットですねぇ。
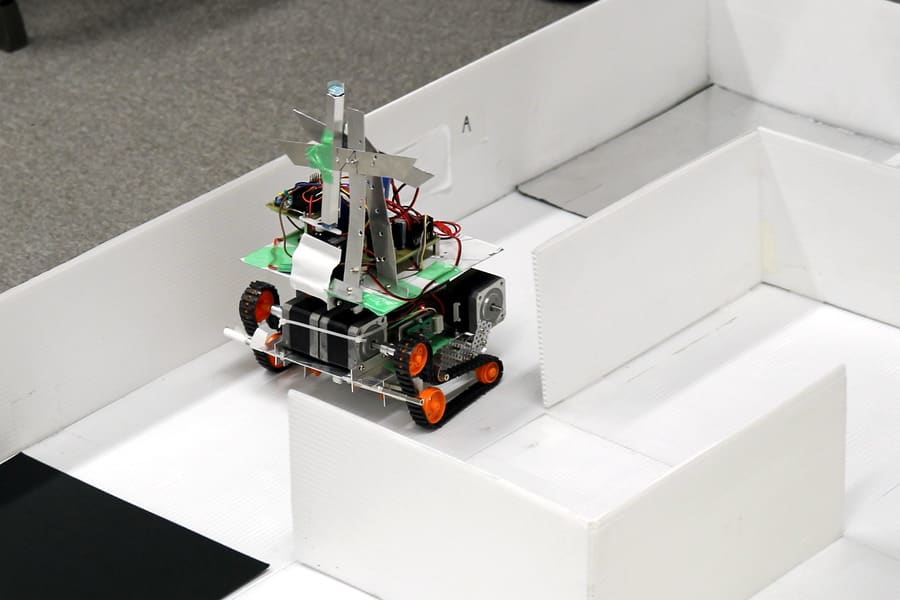
最後に、team "LINQ"
産技高専のチームですね。
"LINK" じゃなくて "LINQ"
これまで、タイヤの4輪でしたが・・・今回は大きなクローラーになっていました。
プレゼンポスターには Makeblock社製のゴムクローラーと書かれています。ゴムクローラーなのですが、金属軸を使っていて長さの調節ができるらしいです。
今回は、きちんと見てないので、レスキューメイズのチームのロボットがきちんと動いていたのか、順位はどうだったのかはわかっていません。
関東ブロックのチームがジャパンオープンで活躍することを願います・・・。
また、飽きずに富士山を見に行きました。
今回は、県道730号で御殿場の方から山中湖に抜けました。

途中の峠で・・・富士山の頭の方だけ・・・見えました。
で・・・この峠の坂道が・・・厳しい!
べた踏みなのに、全然スピードが上がりません。

こんな感じです。(この後の発進が厳しかった・・・)
そして、山中湖側のパノラマ台から・・・

富士山と山中湖
いや~素晴らしいながめですなぁ。
道の駅つる
で購入したヒレカツサンド

サンドイッチというと、具がパンにはさんであるものですが・・・
このカツサンドは、中の肉がめっちゃデカい!
タイトルのヒレカツサンド!!の「!!」は、このデカさです。(笑)
私は、これをガブッとできるほどの大きな口が開きませんでした。
パッケージには、「全国銘柄ポークコンテスト2016最優秀賞甲州富士桜ポーク」と書かれています。

まあ、とにかく、肉が素晴らしい・・・!!
これを購入した 道の駅つる は、リニア実験線のすぐ近くです。

先日のRCJJ関東ブロック大会2017の Rescue Maze のフィールドです。
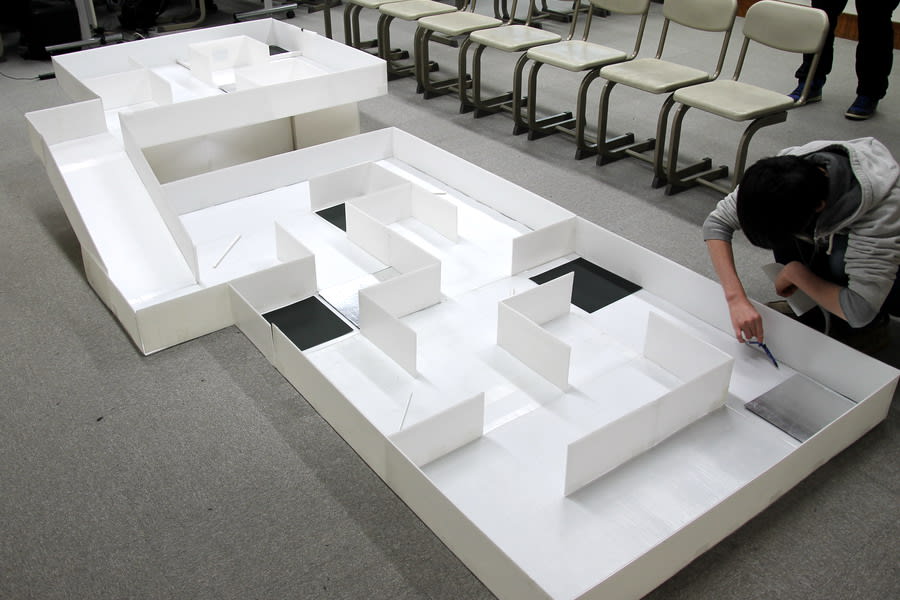
ベースは、私が数年前に作成したプラ段を利用した簡易フィールドです。
M&Yも花鳥風月も、ジュニアを卒業してしまったので、高専に進呈したものです。
コースは、特に難しい感じはありません。
交差点に斜めに置かれたスピードバンプが嫌な感じですが・・・と、思ったら、これはスピードバンプでは無くて、瓦礫なんだそうです。
2016年ルールから、瓦礫が高さ1cmまでになりました。
だから、これまでスピードバンプとして使用していた丸い棒が、そのまま撒かれています。
(床に固定されていません)

じゃあ、スピードバンプはどうなったのかというと・・・
2階の一番奥に、高さ2cmの角棒と丸棒が鎮座していました。
しかし、残念なことに、この新スピードバンプまでたどり着いたロボットはありませんでした。
関東ブロックの Rescue Maze のチームの世代交代の時代なので・・・頑張って欲しいです。
ガソリンを入れる度に・・・つい燃費を計算してしまいます。
今回は・・・604.0kmを走破して、給油量が25.88Lだったので
燃費は 23.3km/L でした。
冬になると、燃費が落ちるハズなのですが・・・ここのところ、暖かい日が続いたからでしょうか?
特に、悪いということはありませんでした。
あるふぁ君 に装着したタコメータ(レーダー探知機とも言う)ですが・・・
あるふぁ君 の電源を入れると、少ししてから「測位しました」と音声が伝えてくれます。
測位というのが、GPSの電波を受信して、自車の現在位置を把握しました・・・という意味なのでしょう。
でも、毎回「即位しました」と聞こえてしまいます。
だから・・・「お前は天皇か!?」と一人ツッコミをしています。(笑)
レスキューラインの競技会場が別だったので、競技は殆ど見ていません。
今回のレスキューラインのフィールドは3つ用意されていました。
2つがWL(ワールドリーグ)用で1つがNL(日本リーグ)用でした。
(下のフィールドの写真は、交差点マーカーを貼る前のものです)
まずはWL用のフィールドA1です。

関東ブロック大会にしては難易度が高くない感じです。
いや、むしろ簡単ですよね。
あえて言えば、傾斜路を上ってすぐの直角位ですかねぇ。
これは、少なくともライントレースの部分は満点を出してほしい・・・出せるでしょう!
次に、こちらがWL用のフィールドA2です。

こちらに方が難易度が高いです。
傾斜路までは、簡単そうですが・・・
傾斜路を下りてすぐに直角で左です。
前に壁が有るので、機体の大きなロボットは大変そうです。
その後に、1つのタイルに2つの交差点が設定されています。(1つのタイルに3つの直角が設定されていることになります)
次の円形のループに接続する交差点は簡単そうで簡単でない。交差点の前の直線部分が短いので、ロボットは斜めのまま緑色を検知しなければなりません。
さて、最後がNL用のフィールドA3です。
(フィールドAxの「A」がレスキューAの名残ですよね 笑)

これは・・・結構難しいと思います。
直角から傾斜路、傾斜路から直角、ここら辺の難易度は結構高いかも・・・
競技結果は、新システムのおかげですぐに見られます。

最近、毎回思うのですが・・・競技進行停止の回数が多すぎませんか!?
WLの優勝チームですら、17回です。(平均すると1分に1回以上、競技進行停止をしていることになります)
私としては、競技進行停止は本来はできないこと(被災場所に入ったロボットはやり直しなんてできないですよね)なので、競技進行停止を無くして欲しいです。それができないのなら、競技進行停止には何らかのペナルティを付けて欲しいです。
毎回減点にするとか、競技時間を減らしていくとか・・・
いっそ、メジャーのレスキューのように、競技進行停止をすると最初から(0点から)やり直しが良いのではないでしょうか!?
CoSpace Rescue は競技進行停止に該当する Re-locate がありますが、1つの試合で3回までと決められました。素晴らしい考えだと思います。
昨日は・・・RCJJの関東ブロック大会でした。

この大会で・・・レスキューのスコアリングシステムが試行運用されました。
副審はスマホのアプリでスコアを記録します。
競技が終ったら、そのスコアが転送されて即座に結果が表示されます。
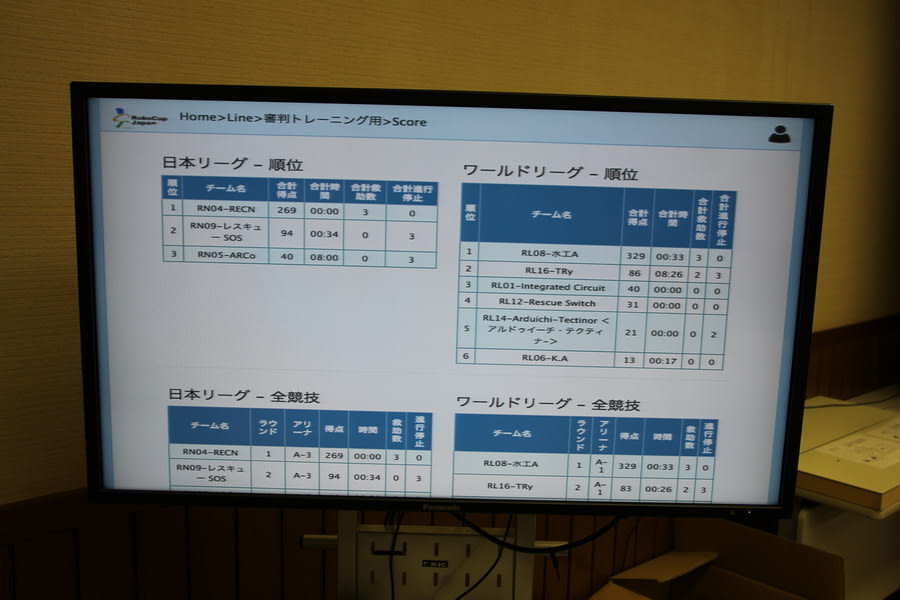
というのを、実験していました。
(上の写真は、スタッフの練習用)
で・・・当初は、多少のトラブルはあったものの、きちんと機能したようです。
だから・・・スポーツ競技のように、競技が終るごとに・・・暫定xx位が見えます。
(これが良いのか・・・悪いのか・・・)
M&Yが参戦した頃の大会では、表彰式まで結果(順位)が判らずに、表彰式でチーム名がアナウンスされて一喜一憂して居た頃が懐かしい!! (笑)
あっ、今回の関東ブロック大会で最高に素晴らしかったこと
「P1」と「P2」が揃ったことですねぇ。
(サッカーOBのREMさんといっしょに)プレゼンポスターの審査員をやってました。
前の記事はこちら プリウスαねた タコメーターを取り付けてみた その2
あるふぁ君に OBD接続のタコメーターを付けたことで、いろいろな情報が取り出せることが判りました。
通常は、「タコメーター(エンジンの回転数)」、「エンジンの温度」、「バッテリーの充放電の電流」の3つを表示しています。
あるとき、ふと思いついて、車速を表示してみました。
あるふぁ君に備えられている、スピードメーターとの比較です。
まあ、ある程度の誤差はあるとは思っていましたが・・・これほどとは・・・
あるふぁ君のスピードメーターは実際の1割増し程度に表示されているようです。
つまり、99km/h の表示で、実際の速度は90km/hということです。
大体、市販車は、実際の速度よりも多めの表示になるように設定されているとか・・・
続きの記事はこちら プリウスαねた 電池の充電量
本日は、ロボカップジュニアの関東ブロック大会でした。
私は、CoSpace Rescue のスタッフとして運営のお手伝いをしてきました。
今回、CoSpace Rescue への参加は2チームだけだったので・・・
競技が終った後に、その2チームと私とOB(2014年の世界第2位)の4チームでエキシビジョンマッチを行いました。
別に、競技をしたかった訳では無く・・・プログラムの考え方などを解説したかっただけです。
で・・・そのエキシビジョンマッチで優勝してきました。(笑)
一応アドバイスとしては
・ロボットが搭載しているオブジェクトの数を把握して、沢山搭載(5個や6個)したらコレクションボックスを目指すこと。
・Superオブジェクト、Super+オブジェクトが発生したら、まず、それを確実に収集すること。
単純にこの2つですね。
いよいよ、明日は、ロボカップジュニアの関東ブロック大会ですね。
スタッフとして運営をお手伝いするのですが・・・
楽しんで来ようと思っています。

| 閲覧 | 761 | PV | |
| 訪問者 | 363 | IP | |
| 閲覧 | 3,287,865 | PV | |
| 訪問者 | 1,157,383 | IP | |
| 日別 | 2,075 | 位 | |
| 週別 | 1,838 | 位 | |




