前の記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その22
さて、メインのPCを Windows11 にしたので、RCXの延命が可能かを確認します。
メンテに使用するのは NQC です。
もうすでに、BricxCC を導入済で、NXT でNXCが使用可能なことは確認済です。
で・・・ここからRCXの話
まずは、PCに USB - RS-232C 変換ケーブルを接続します。
そうすると、デバイスマネージャーの「ポート(COMとLPT)」にポート番号が表示されるはずなのですが・・・
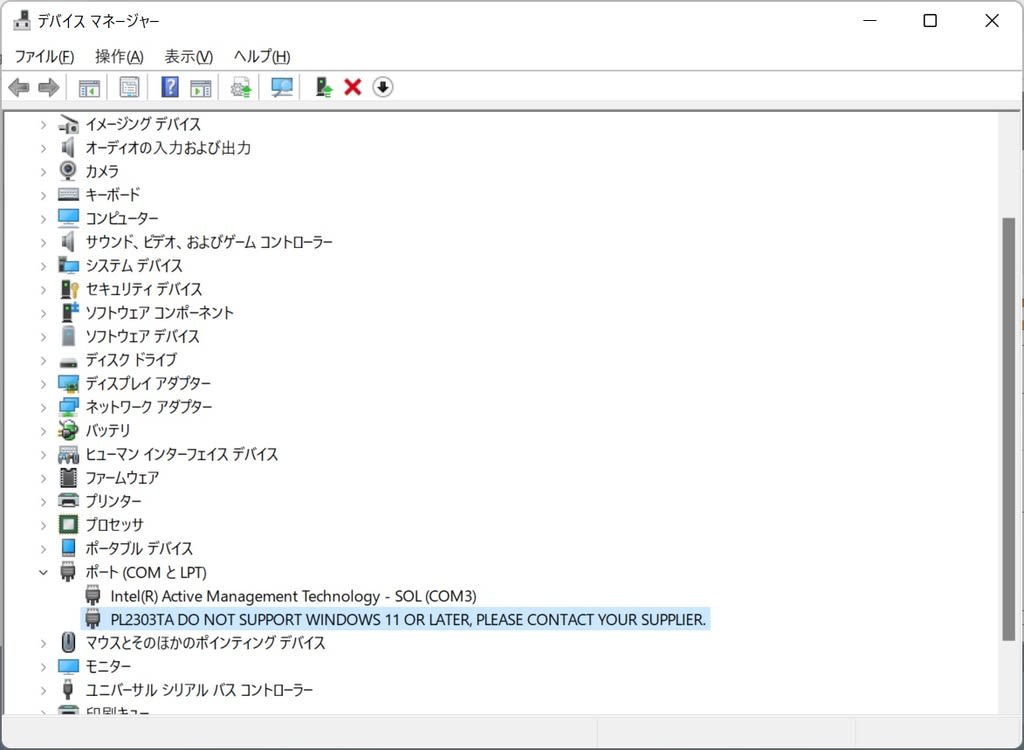
PL2303TA DO NOT SUPPORT WINDOWS 11 OR LATER
この変換ケーブルは Windows11 では使用できないらしい・・・(涙)
えっ~・・・ということは、わたしが持っている RS-232C変換ケーブルは Windows11 では使用できないので、(Windows11をサポートしている)別の変換ケーブルを買わないとだめなの⁉
と、あきらめかけたのですが・・・
ぐぐると、新しいドライバ(らしきもの)があったので適用してみました。
すると・・・
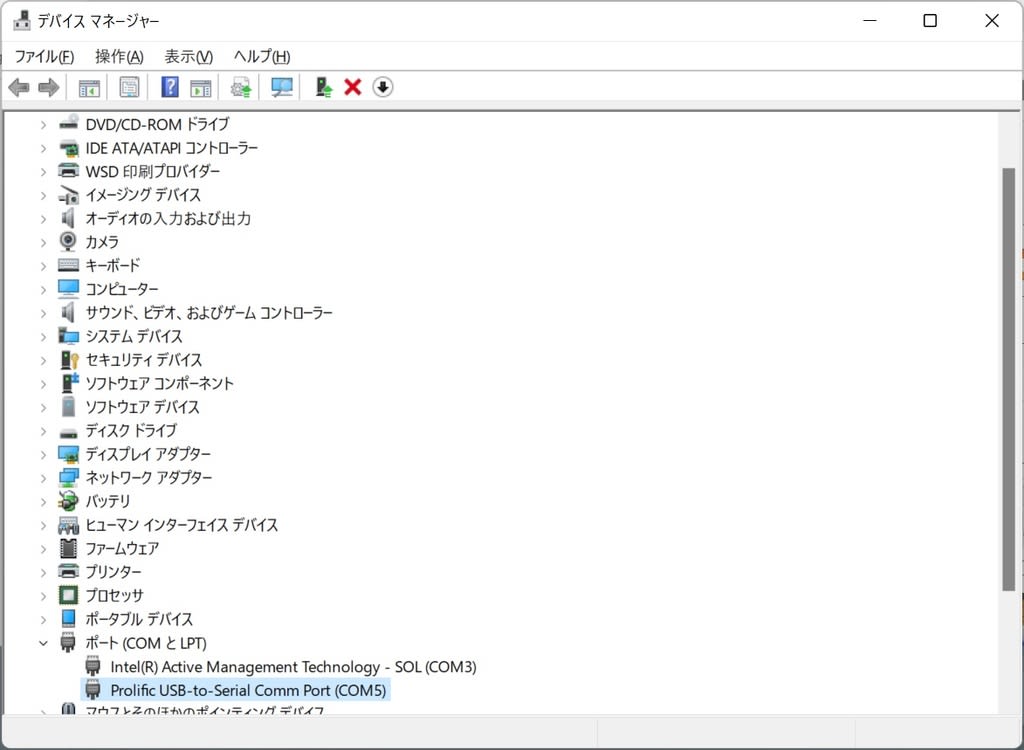
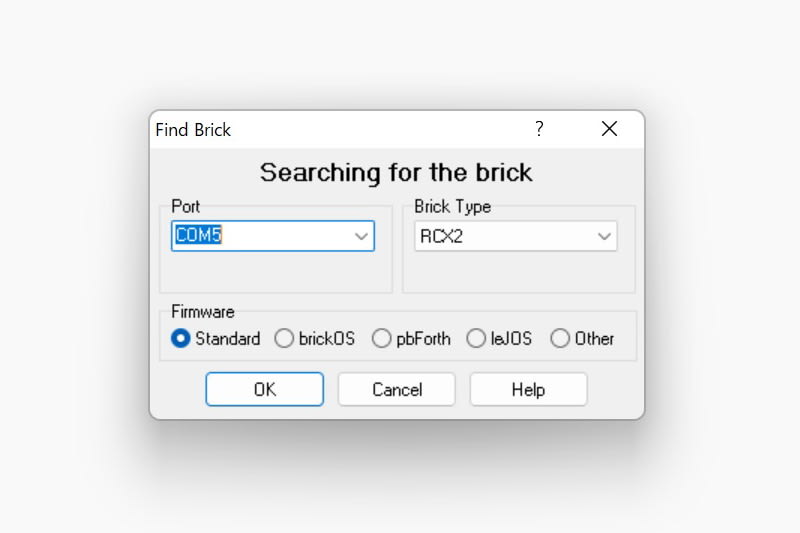
RS-232Cケーブルが COM5 に割り当てられました。
よし、いけるぞ!
と思ったものの・・・だめです。
デバイスマネージャ上では、エラーなどなく、デバイスが接続されているように見えるのですが・・・RCXとの通信ができません。
もう、ぐぐってはテスト、ぐぐってはテストを繰り返して、あがいた結果・・・
やっと通信ができるようになりました。
もう、何をどうやったのか、定かでないのですが・・・私の(かすかな)記憶からして
・シリアルポートのドライバを削除
・PL2303_Prolific_DriverInstaller_v1.12.0.exe を実行
で・・・できるようになったのだと思います。
参考にしたのが、このページ
いや~、長かった!
よくわからないけど・・・ドライバを最新のものでなくす(古いものに戻す)ことが必要だったようです。
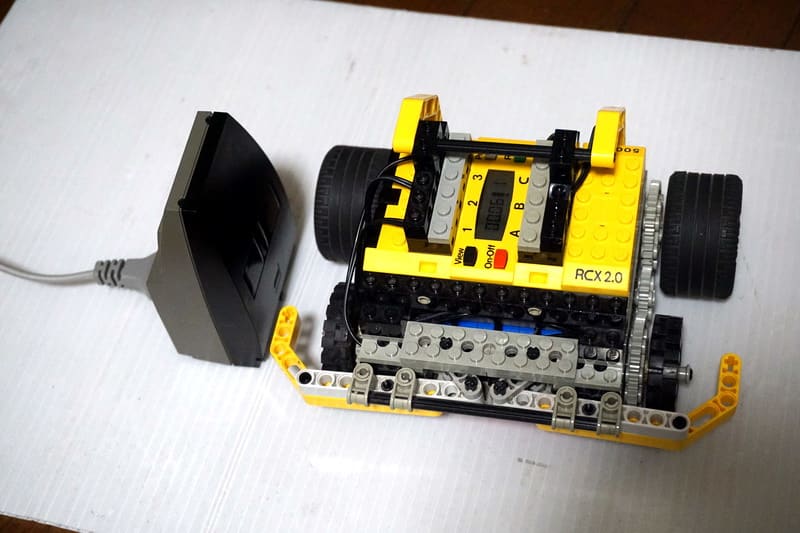
これで・・・やっと RCX に接続できるようになりました。
これで、Windows11 でも RCX のプログラミングができるようになりました。
でも・・・何で、毎回、こんなに苦労するんだろう・・・俺!(笑)
(まあ、いまどき、RCXを動かしている人間が、全世界中にどれくらい居るかわかりませんが・・・)