いまさらですが・・・RoboCupJunior Rescue New Simulationsのルール(0518のドラフト版)を読んでみました。
モノはここにあります。
まず最初に・・・Junior の Rescue の2020年の国際OCが記載されています。
これ・・・どこにも公開されていないので、初めて知りました。(RoboCupJunior のペ-ジにも2020年のTC/OCが公開されていないのはなぜ!?)
しかも・・・なんだかか知っている人が多い!(笑)
それはさておき・・・ルールの内容についてです。
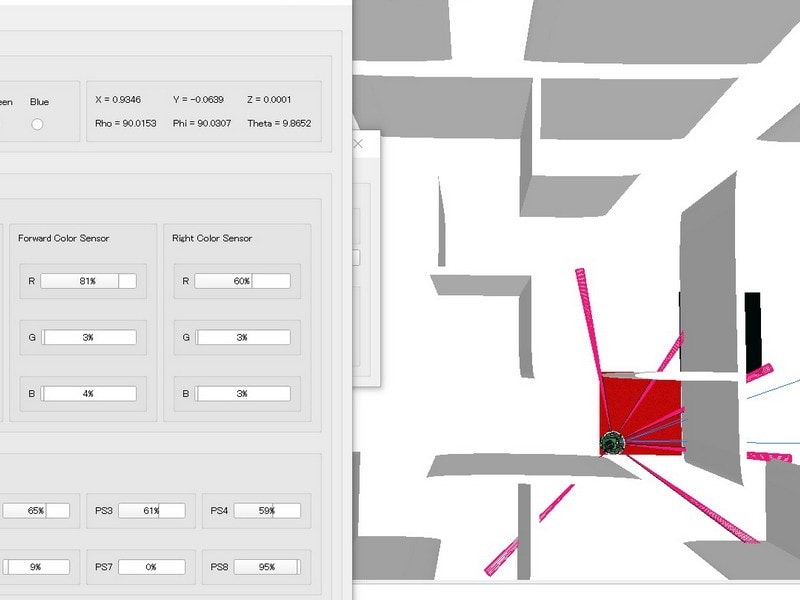
まず、Junior Rescue-Maze をシミュレートする競技のようです。
だから、基本は Rescue-Maze です。
なかなか良いな・・・と思ったのは、競技をする前にすべてのチームからPC(の中にプログラムが入れてある)を提出する(4.3.1)ことになっていて、提出されてからはプログラムの変更ができない(4.3.5)ことです。これは、競技順が早いチーム、遅いチームで公平ですね。(ただ、4.4.1で、競技直前に競技サーバとチームのPCを接続する操作をチームにさせますので、そこで不正が発生する危険性があります。PCを提出後は、すべての操作を審判側(運営側)でできれば良いのですが・・・)
で、さらに・・・競技のフィールドをチームに提示するのは、PC提出の〆切の後なので・・・(基本的には)プレマッピングができません。(スタッフ側からの情報の流出がなければ・・・笑)
これなら、競技フィールドを作るために、前の日の夜に遅くまで苦労して作業する必要がありません。(シュミレーションの競技なので、もともと実フィールドを作成する必要はありませんが)
あと、得点関係でいえば、誤発見の5点減点、競技進行停止の5点減点・・・と減点もちゃんと設定されており、正確で慎重救助活動が求められます。
あと・・・んっ!? と思ったのは・・・
2.5.2 障害物を設置する場所や条件が全く示されていません。ということは、どこにでも置けちゃうってこと!?
2.5.3 Rescue-Mazeでは黒タイルですが、New Simulation では穴になっています。この穴に落ちないように穴の周りの黒い淵の部分で感知して穴に落ちないようにするのでしょうけど・・・その黒い淵の部分の大きさなどが記載されていません。(床の色のセンサーは、黒い床だろうと、穴だろうと黒と判断できるから関係ない、ということか!?)
3.2.1 a ロボット自身の位置がわかるセンサー・・・これは、CoSpaceにあった、ロボットの座標が分かるってこと? 実機ロボットでは、そんなセンサーはありませんよね。(GPSがある意味、そういうセンサーかも・・・)おそらく、CoSpace のWorld2でロボット自身の位置の座標が分かるようになっていたので、その流れで残っている表現なのだと思うのですが・・・これがあれば、Exit Bounus も簡単に手に入ってしまいます。
座標が分かるセンサーということであれば、これは無くした方が良いと思います。その代わりに、進んだ距離やタイヤの回転数を計測できる、とかならわかるのですが・・・それから、方位センサーやジャイロセンサーも必要ですね。
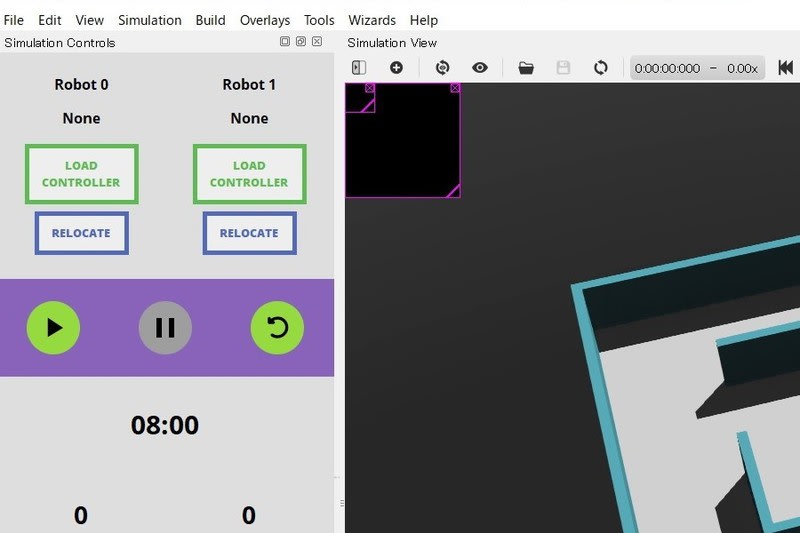
4.5 競技進行停止・・・何日か前に動作確認した、シミュレータプログラムは ReLocate という表現になっていました。ルールとシミュレータの用語が合っていない・・・!? (これも、CoSpace の仕様がそのまま残ったものか・・・)
4.5.2 競技進行停止後の再スタート時に、ロボットを置く方向を決められる、とルールには書かれていますが、(私が確認した時点での)シミュレータには、再スタート時に方向を指定する機能がなかったような・・・それとも、再スタート時のロボットの向きはシミュレータが勝手に決めるよ、ということなのでしょうか?
4.6.3 被災者の得点には2種類あって(30点と10点)、その違いの説明があるのですが・・・黒タイル(いや、ここでは「穴」ですよね)も論理的には壁とみなす、という説明が必要ですよね。(これは、Rescue Maze のルールでも、説明が足りないところ)
こんなところでしょうか・・・







 」
」