








カテゴリに「RCX」が無いので「NXTねた」としてお送りします。
2021/1/24 追補 カテゴリ「RCXねた」を追加したので、カテゴリを移動しました。
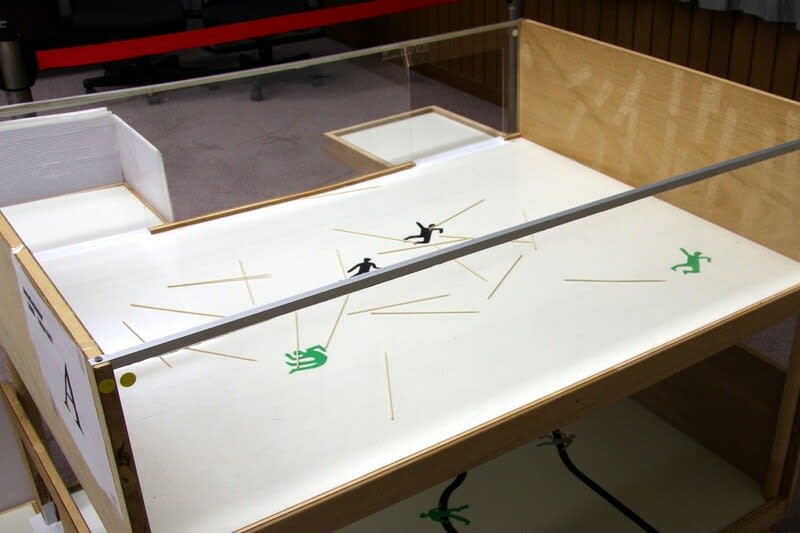
ここ一連のノード大会を見て・・・今のレスキュー日本リーグの競技は、昔の(2008年頃の)ジュニアレスキューレスキューの競技と似ている(いや、そのもの)と感じている方々もいらっしゃると思います。
先日、茨城ノード大会で日本リーグのスタッフとして参加したYも同じような感想を持ったそうです。
昔と違うのは・・・
①傾斜路の下りがあること(昔は傾斜路を登ったところに最後の部屋があり、そこで被災者を発見して終わり)
②スピードバンプが高い(昔は直径1cmの丸棒を半分にしたものだった:つまり高さ0.5cm)
③被災者が最後の部屋にしかいない(昔は、黒線の上に銀や緑のシールが貼られていた。つまり経路上にも被災者が居た)
これぐらいなんじゃないかと・・・
細かいことを言うと・・・昔は決め打ち(今で言うところの「プレマッピング」)が禁止されていなかった。(禁止されていないどころか、決め打ちで成功すると、「凄~い!」と褒められた!)
現在の被災者

2009年の被災者
で・・・ここまでルールが似ているのなら、大昔(M&Yが現役で活躍していた2008年頃)のロボットが使えるのではないかと・・・
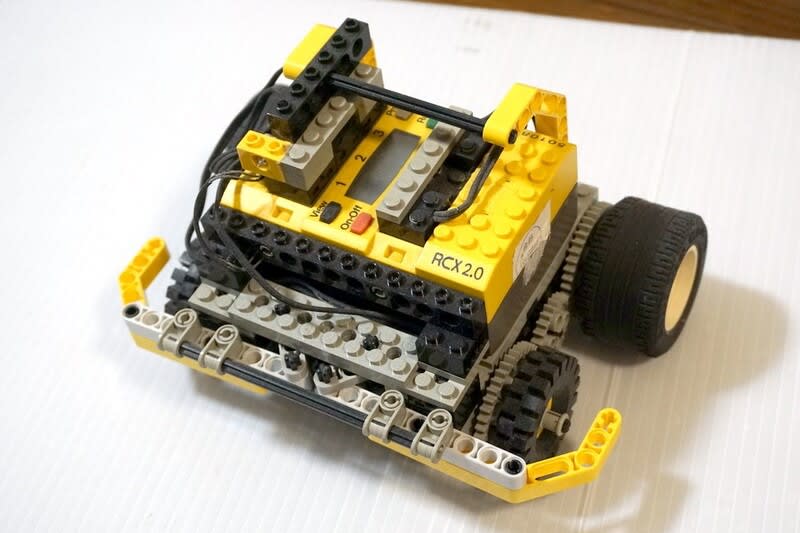
ということで、壊さないで大事に(!?)保管してあった M&Y Zwei を動かすことができないか・・・というプトジェクトを発足させました。
このプロジェクトの難題は・・・
①コントローラーが LEGO MINDSTORMS RCX であること。このため、PCで作成したプログラムをロボットに転送するために、赤外線通信が必要で、そのための赤外線タワーが使えるかどうか!?
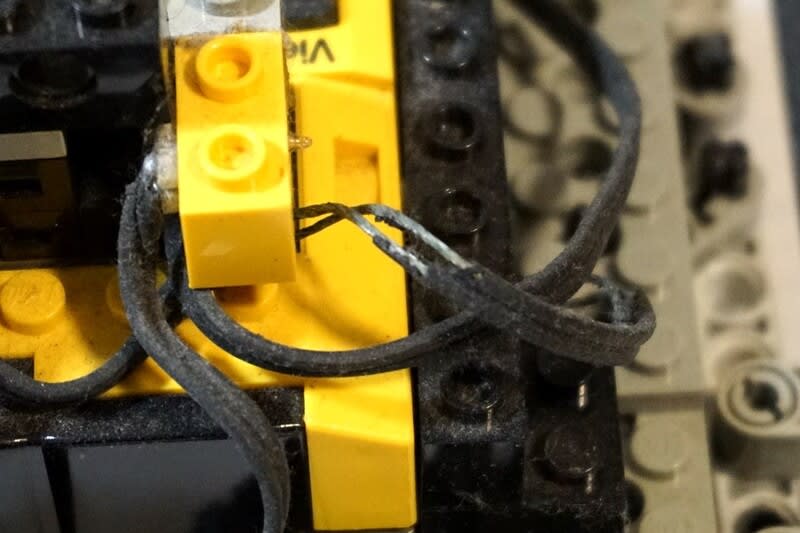
②経年劣化で、RCXとセンサーやモーターに接続するケーブル(いわゆる電線)がボロボロで使用困難であること。
と、ハード&ソフトの両方にネックがあります。
埃だらけの・・・M&Y Zwei
経年劣化で、ケーブルがボロボロ
じゃあ、そんなに苦労せず、NXTでやれば・・・となるのですが・・・
ロボカップのレスキューラインの基本であるライントレース
このライントレースの技術が衰退したのはLEGO社が RCX⇒NXT に移行する過程で光センサーの大きさを大きくしてしまったのが原因だと考えています。
RCXの光センサーはコンパクトでちょうどよい大きさでした。
これを3個並べてライントレースするのが最強だったと思っています。
(現在の、EV3やNXTの光学センサーは大きくて、2つ並べるのが標準です。無理して3つの光学センサーを並べるチームも居ますが、センサーが大きいので隙間ができてしまう・・・)
と・・・御託を並べてもしょうがないので・・・いろいろと実験をしていきたいと思います。
まずは・・・昔、大変お世話になった、ROBOLAB が使えないか・・・というところからですかねぇ。
続きの記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その2






