








先日のNESTロボコンのレスキューコースです。
日本リーグだから、めっちゃ簡単! なハズなのですが・・・けっこう、みんな苦労してました。(笑)
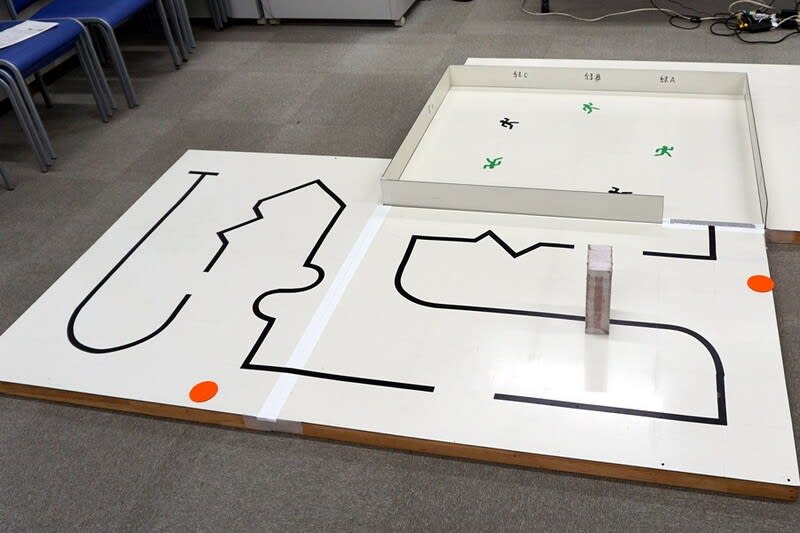
スタートした後には緩い左カーブでUターンします。その後に最初の得点イベントである「ギャップ」、その後にいきなり稲妻型のギザギザです。これは直角2つが重なっていて、いきなり難易度高いですね。稲妻を抜けると、右直角でUターンです。そして今度は小さな半円を2つ重ねた波型ですが・・・最初と最後が直角です。(直角多いですね) 波型を抜けると左直角のタイルが最初のチェックポイントです。
チェックポイントを抜けると長い直線の途中にギャップがあります。なんか急に簡単な感じ・・・左直角、左カーブの先に障害物の回避があります。 その先は右カーブ右直角の先に稲妻型の2つの直角、ギャップ、左尾直角が2つ目のチェックポイントで避難ゾーンに続きます。
(ところで、これは、ルール自体の話ですが・・・「避難ゾーン」という名称、なんだかおかしく ないですか? 何が「避難」なのでしょうか? 避難している人たちがいるから「避難ゾーン」? 救助を待つ人たちを救助するので、「救助ゾーン」の方が正しい様な・・・)
避難ゾーンの入口には銀色のテープが貼られていて、ゾーンの中には緑と黒の被災者が貼られていました。
今回は、黒の被災者発見のアピールと緑の被災者発見のアピールが明確に分かれていました。だから緑の被災者の上で「黒の被災者発見のアピール」をしても得点になりません。(逆も同じでした)
また、脱出のアピールをしてしまうと(たとえそれが、ライントレース中でも)競技終了になりました。
こちらが、スタンダードプラットフォームのロボット
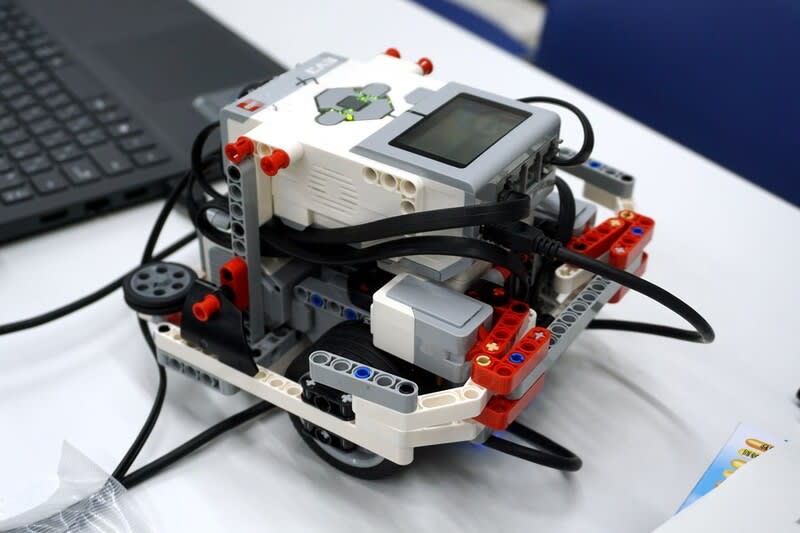
EV3ベースで、センサーは、カラーセンサー×2 と タッチセンサー×2 です。
私が見た感じでは・・・2つの光センサーで黒線を挟んでライントレースするので、「黒線の上に居る」のか「黒線の上に居ない」のかを判断するのが難しかったようです。いくつかのチームは、タイマーを使用して、「一定時間、左右のカラーセンサーが黒線を検知しなかったら、黒線を外れた(またはギャップに入った)」という判断でギャップの先の黒線を探す動作をしていましたが・・・「黒線を探す動作の範囲が狭い!」という感じでした。この黒線を探す領域をもっと大きくしたら、もっと得点が伸びたと思うのですが・・・
なにしろ、ギャップでコースを外れて、競技進行停止が多かったです。
やっぱり、現地でテストランができないのは、チームにとっては可哀そうですね・・・はやく、普通に競技会ができようになると良いのですが・・・ねぇ。















