








前の記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その15
先日の関東ブロック大会の時に、デモ用(!?)に2008年のロボット M&Y zwei を持っていきました。
そのときに、高専のレスキューフィールドで校正(calibration)を実施してきました。
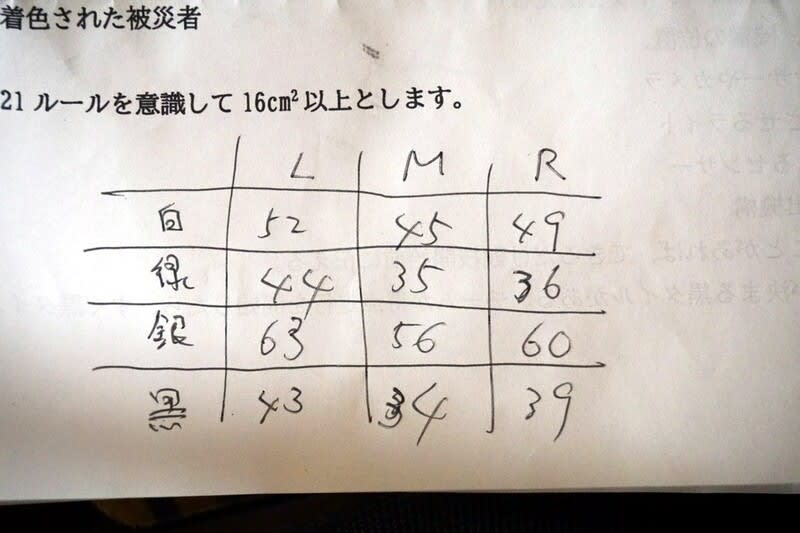
字が汚いのはご愛敬です!?
RCX時代の光センサーですので、まあ感度はこんなものだと思います・・・
値が大きい順に銀、白、緑、黒ですね。
注目は、黒と緑の数値です。
もともと、RCX時代の光センサーは感度に個体差があり、同じ色を見せてもセンサーの値は結構バラつきますよね。
で、なんとか黒線の上の緑の被災者を判別するために、いろいろと工夫をしました。
真ん中の光センサーは、装備されている赤色のLEDを(緑の判定がしやすいと言われていた)青色のLEDに交換したものです・・・しかし、実際には黒と緑の判別は難しいです。
仲良しのドイツチームから、「これは緑の判定ができます」とLEDが換装された光センサーをプレゼントされたのが懐かしい!
黒と緑の判定が難しいとなると・・・日本リーグではなく、ジュニアレスキューのワールドリーグの交差点を判別させるのは、RCXの光センサーでは難しそうですね。
続きの記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その17















