








先日の RCJJ(RobopCupJunior JAPAN)東京神奈川ノード大会でのレスキューロボット
(私、個人が)
おぉ! と思ったものを紹介!

カメラを搭載したロボット・・・センサーがカメラのみ。 そのカメラでライントレースと被災者発見など、すべて1つのカメラだけで実施するという漢らしさ!
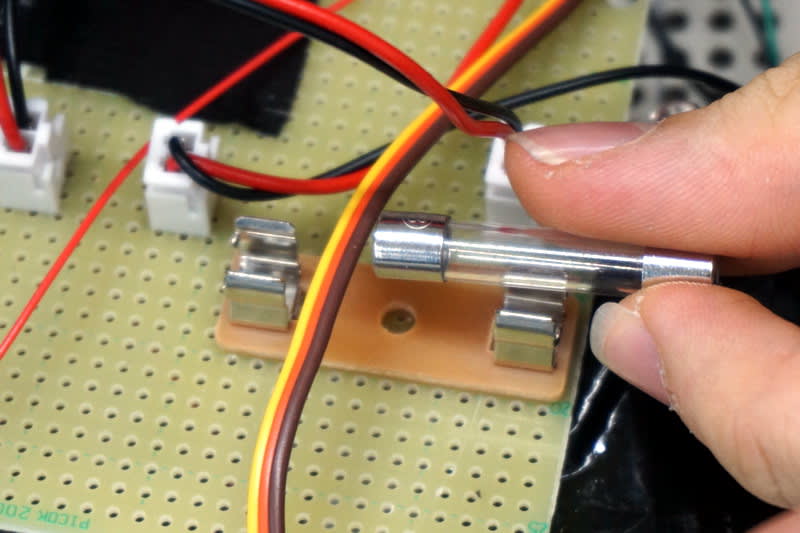
競技進行停止のときのために、バイナリスイッチを装備する必要があるのですが・・・そのスイッチとして・・・ヒューズを抜き差しするそうです。
うん、これも、なかなか漢らしくて良いです!

久々に見ました・・・電池を左右に3本ずつ、前に6本の 合計12本装備!
さすが「電池の本場、神奈川!」
(これ、わかる人、いないでしょう・・・)
そんなに後側が重いのでしょうか?

被災者を運搬するためのストッカーを搭載するのは当たり前ですが・・・そのストッカーで銀の被災者と黒の被災者を識別、分別することも(将来的には)できるようになるとか・・・これは期待できますね。(2023年ルールに対応できそう⁉)
現状では、まだ、識別する機能は搭載されておらず・・・ずっとストッカーの十字の羽が(ゆっくり)回っていて、アイスクリーム製造機のように見えました。

ロボット本体を養生テープで貼って固めたロボット⁉
これは・・・メンテナンスがし難そうですが・・・意外と、手で破ってメンテして、また上から養生テープを貼れば良いので、そんなに面倒ではないのかもしれません。
駆動部分(クローラー)がとてもカッコイイので、できれば上のボディの部分もカッコよく作って欲しいなぁ・・・
昔は、関東ブロックと言えば「LEGOロボット」だったのですが・・・もう、最近の Rescue Line は LEGO の基本機能だけでは賄うことができずに、何らかの追加機能を独自に追加する必要があります。(M&YもNXT+Arduinoで実現していました。) 今回も、いろいろと独自にセンサーやコントローラの拡張を研究しているチームが多かったです。
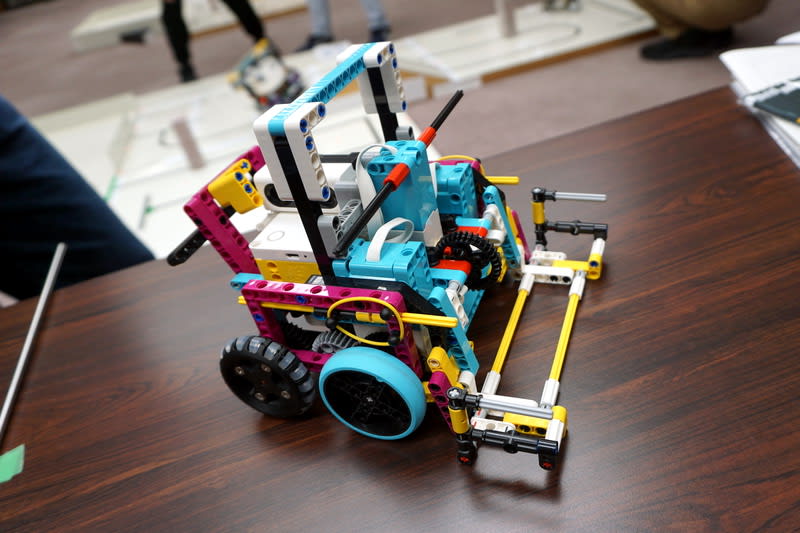
これは、スタッフが作成した LEGO Spike のロボット。
コンパクトで、被災者救助のアームのギミックが緻密で凄いです・・・
ただ、やっぱり Spike 1個ではポート数が限界(≒接続できるセンサーの数が足りない)で、WL Rescue Line には、足りない感じです。
これも、使えるセンサーの数が増やせれば、さらに素晴らしいロボットになると思うのですが・・・















