








千葉ノード大会のレスキューロボットですが・・・
やっぱり、千葉ノードの特徴として自作機が多いです。
LEGOのロボットと半々ですね。
今回は、優勝、準優勝共に「しぶまく」のチームで自作機でした。
まずは、優勝したチーム「おいらぁ」
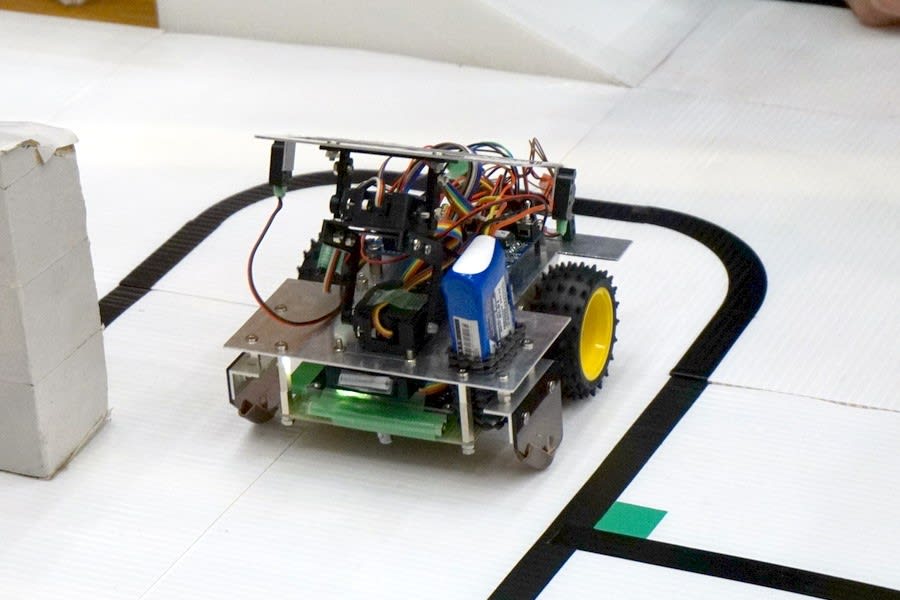
小型なのに、きちんと被災者の救出機構を備えています。
しっかりとしたライントレース
交差点も正しい方向にきっちりと90度回転
もう、無敵・・・という感じでした。
昔に見た、マイクロマウステクノロジーのロボットみたいです。
レールの上を走るように、カチッとした(危なげない)動きでした。
すげ~!
ただ・・・2輪のロボットで、ボディの一部を床にこすりながら進みます。そして、小さいがゆえに重心のバランスが微妙で、坂道で転がってしまうことがありました。ここらへんを改良すれば、まだまだ行けると思います。
これまで、何年も千葉ノード大会のお手伝いをしてきましたが・・・最後の部屋での被災者救出は見たことがありませんでした。しかし・・・今回初めて被災者を避難場所に移送することができました。
(「被災者の救出」と書かないのは、黒の被災者を避難場所に移したから・・・だから、救出ではなく移送 笑)
もう一つが、準優勝のチーム「るうろお」です。
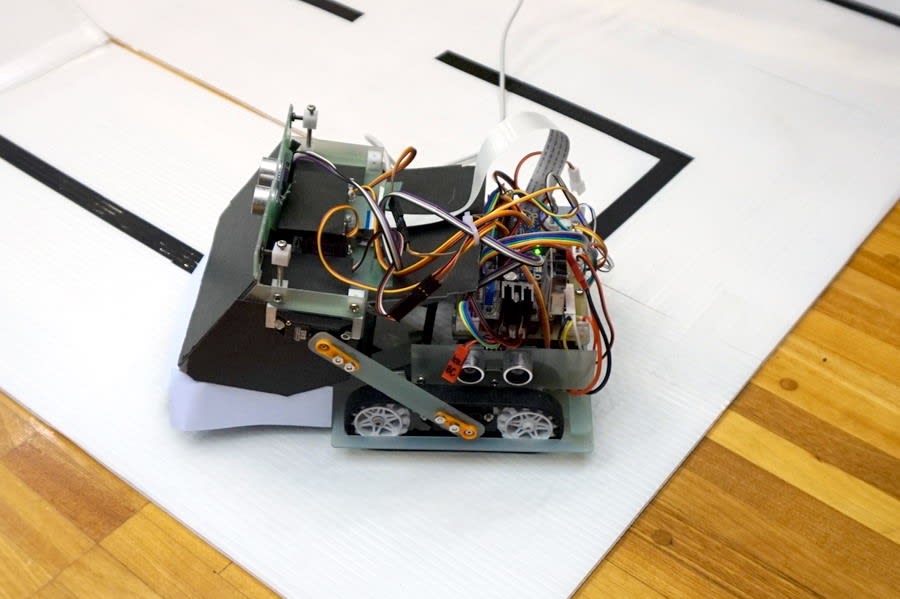
このロボットの特徴は、何といっても、ライントレースをカメラの画像処理で実施することです。通常は、床に向けた光センサーで黒線の有無を確認しながら進むのですが・・・床に向けたカメラで黒線を映して進みます。
(上の写真では、練習中なので、ロボットとPCをケーブルで接続しています。)
さらに・・・避難部屋に入ると、カメラを(下向きから)前向きに変えて被災者を探索することができるとか・・・(残念ながら、避難部屋での探索は見ることができませんでした)
しかし、ライントレースの部分の完成度は高かったです。
これまでに、(世界大会も含めて)沢山のカメラの画像処理によるライントレースをするロボットを見てきましたが、どれもアイディア倒れのものが多かったです。
私が感心したのはドイツの「Hoppus」くらいですかねぇ・・・
http://blog.goo.ne.jp/mypapa8888/e/591912e57e03f0ef61a3d32cb783608d
私は、カメラロボットは、まだまだ光センサーロボットを越えるものではない・・・(少なくともジュニアでは)と考えていたのですが・・・
この「るうろお」のロボットは、私のこれまでのカメラロボットの評価を書き換えるものでした。
ただ、カメラにも向き不向きがあるようで・・・銀色を判別するのが難しいようです。(被災者の色が赤や青になればいいのですがねぇ)
あと、久しぶりに・・・
今週のビックリどっきりメカ
チーム「ちばふB」のロボット
(写真が無くて済みません)
LEGOのロボットで、大きな白い車輪の三輪車です。
三輪車なので、ステアリング機構があるのかというと・・・特にそういうものは無く、3つの車輪は固定されています。後輪の左右の二輪に別々のモーターが付いていて左右に曲ります。
で・・・なにがビックリかと言うと・・・光センサーの配置です。
三輪車の中心(三輪車の椅子の位置)に下向きに2つの光センサーが搭載されているのですが・・・(横に並んでいるのではなく)縦に並んでいます。
2つの光センサーが黒の状態(つまり黒のラインの上に居る)で進む。2つの光センサーが黒の状態で無くなったら、黒線を探す・・・こんな感じだと思うのですが・・・
とにかく、インパクトのあるロボットでした。
(実際には、ライントレースができていませんでしたけど・・・)















