








RoboCupJunior JAPAN のHPに
今年の日本大会オンラインのオープニングイベントが掲載されていました。
https://www.robocupjunior.jp/2021-online_outline.html

浅田先生の講演ということで・・・なかなか素晴らしいことですね。
ただ、公開のしかたが全く書かれていません。
参加者だけが視聴できるのか、誰でも視聴できるのか?
こういう情報が必要なんだと思うのですが・・・
RoboCupJunior JAPAN のHPに
今年の日本大会オンラインのオープニングイベントが掲載されていました。
https://www.robocupjunior.jp/2021-online_outline.html
浅田先生の講演ということで・・・なかなか素晴らしいことですね。
ただ、公開のしかたが全く書かれていません。
参加者だけが視聴できるのか、誰でも視聴できるのか?
こういう情報が必要なんだと思うのですが・・・
近所を散歩しているときに見つけた場所です。
「粕谷二丁目 本橋家の竹林」
住宅地にあるのですが・・・「個人の土地を公開しています・・・」と書かれています。
公園とかではないということですね・・・



確かに、見事な竹林です。
まあ、住宅地の中なので広くは無いですが・・・

ニュースで、東京の桜が開花したと報道されていました。
ニュースからのコピぺ
気象庁の職員が午後2時ごろ、靖国神社(千代田区)の標本木で、開花の基準となる5、6輪の花が開いていることを確認した。
実は・・・今朝、靖国神社の標準木を見てきたのですが・・・その時には、まだ咲いてませんでした。



ですので、本日の午前中に咲いたのだと思います。
標準木の周りには柵が置かれていて・・・朝早いのに報道関係者が結構居ました。

ちなみに、千鳥ヶ淵の早咲きの桜(おそらく、河津桜)は、昨日の雨と風で結構散っていて、花びらの絨毯になっていました。(笑)


現在の RoboCupJunior のレスキュー競技には3種類のサブリーグがあります。
Rescue Line 、Rescue Maze と Rescue Simulation です。
この Rescue Simulation(もともとは Cospace Rescue と言っていたもの)の新しいプラットフォームがリリースされました。
https://www.cospacerobot.org/download/cospace-rescue-download

これまでの、Rescue Simulation は、MRDS(microsoft robotics developer studio)をインストールする必要があったのですが・・・このMRDSがサポート切れで手に入らなくなってしまいました。
どうするのかなぁ・・・と思っていたら、新しいプラットフォームはMRDSが必要ないものになったそうです。
上のハードコピーのように、前のバージョン(MRDSが必要なもの)も並行的に提供はされているようです。
いずれ、試してみようかなぁ・・・と考えています。
ところで・・・
この CoSpace Robot のトップページで表示される・・・

RoboCup Asia-Pacific Tianjin Invitational Tournament 2021 って何なのでしょうか?
RoboCup Asia-Pacific 2021 は愛知のはずなのですが・・・それとは違うものですよね。
いろいろ文句はあるものの・・・私はAliExpressでの買い物が大好きです。
買いたいものがあれば勿論探します。
買いたいものが無くても・・・暇なときに適当に見てます。
なかなか面白いものが揃っています。
(品質はともかく・・・それでも欲しくなる安さ! 笑)
で・・・今回見つけたのは、(おそらく)LEGO互換ブロックの頭文字D(Initial-D)のクルマ

商品の写真が・・・アニメを意識しすぎです!(笑)

そして・・・車両後ろ側のハッチバックの中には藤原豆腐店の豆腐がちゃんと載っています。
(Classic Fujiwara Tofu)←これ、意味分かっているのかなぁ?

さらに・・

車内には、水を入れたコップが・・・細かい!
Auto stop lever というのは 何でしょうか? 私は、ギアチェンジのシフトレバーだと思うのですが・・・
前の記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その18
前回で、Windows XP が起動したので・・・今回は、やっと ROBOLAB(ロボラボ)を入れます。
ROBOLAB には1.5シリーズ、2.5シリーズ、2.9シリーズの大きく分けて3種類があるのですが・・・
M&Yが一番お世話になった、ROBOLAB 2.5.4 をインストールします。
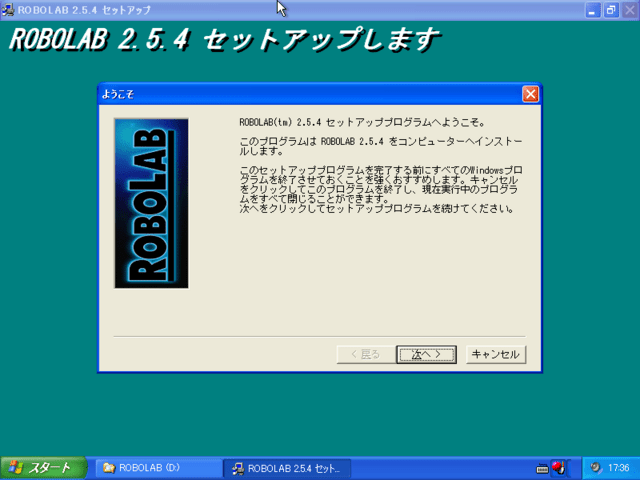
まずは・・・VirtualBox で Windows XP を起動して・・・
ROBOLAB2.5.4 のCDをPCのDVDドライブに入れます。
インストーラが起動するので、インストールを実行します。
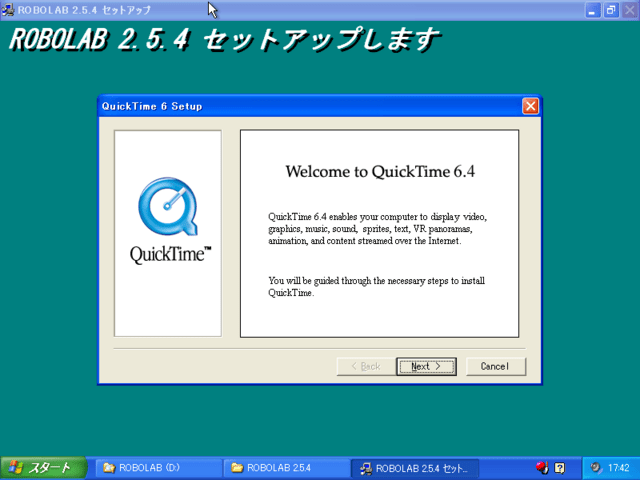
インストールが進むと・・・QuickTimeが無いと怒られるので(別に怒られては無いけど・・・笑)そのままインストールします。

QuickTime 6.4 がインストールされます。
QiuckTime のインストールが終わると・・・次は、WinVDIGです。
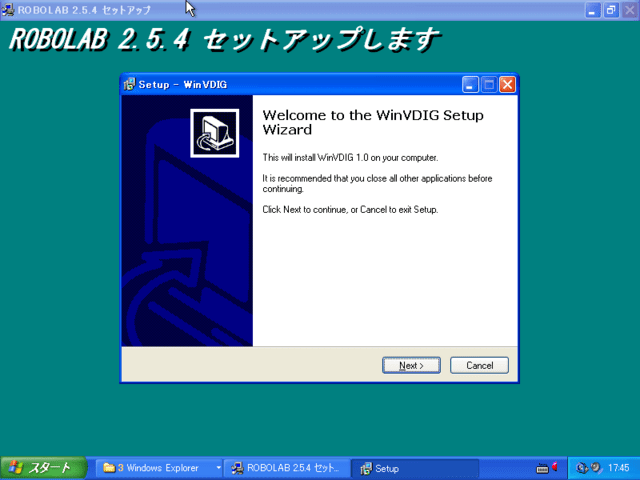
それが終わると・・・ついに・・・

LEGO USB Tower (USB版の赤外線タワー)のドライバーのインストールになりました。
インストールが全て終わると、再起動になります。

再起動(といっても、バーチャルマシンですが・・・)が終わると、デスクトップにROBOLAB2.5.4のアイコンがあります。

で・・・ROBOLABを起動してもRCXと通信ができません・・・どうもUSBタワーが認識されていないようです。
そう、一つ手順を忘れていました。
VirtualBox の デバイス⇒USB⇒LEGO USB Towe を選択すると・・・USB機器が接続された音がします。
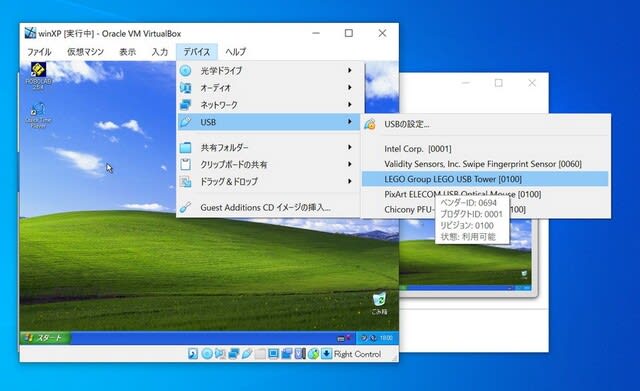
そして、ドライバのインストールになります。
これで、USBタワーが使えるようになったと思います。
ROBOLAB2.5.4を起動して、RCXと接続してみます。
早速、ファームが古いから新しいファームにしようね・・・と促されるので、ファームの書き込みをします。
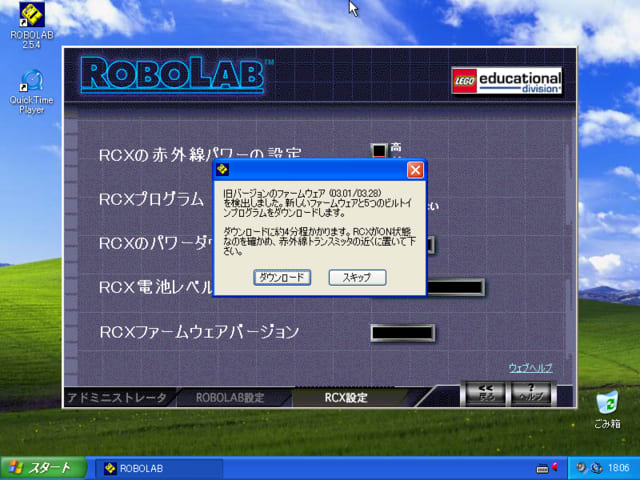
ファームの書き込みが終わると、無事にRCXとの通信ができたということで・・・

電池残量(電池レベルと表示)とファームウェアのバージョンが表示されます。
(この電池残量ですが・・・今回使っている電池がニッケル水素電池なので、満タン表示になっていないのだと思います。)
さて、簡単なプログラムを書いてみます。
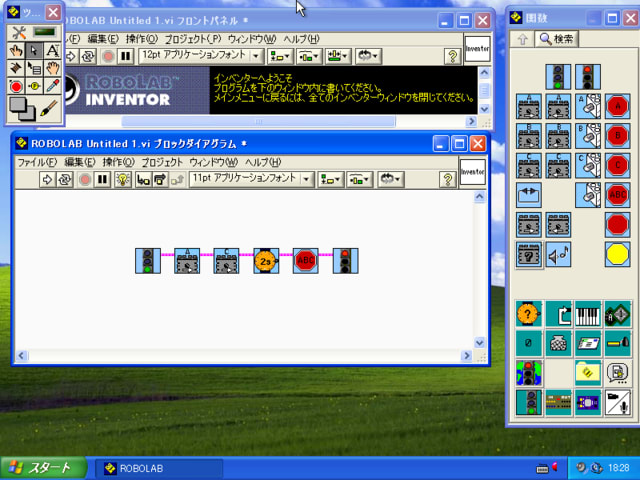
操作方法を忘れてて・・・こんな簡単なプログラムを組むだけで、結構な労力を使いました。(てへっ)
で・・・これをRCXに転送します。
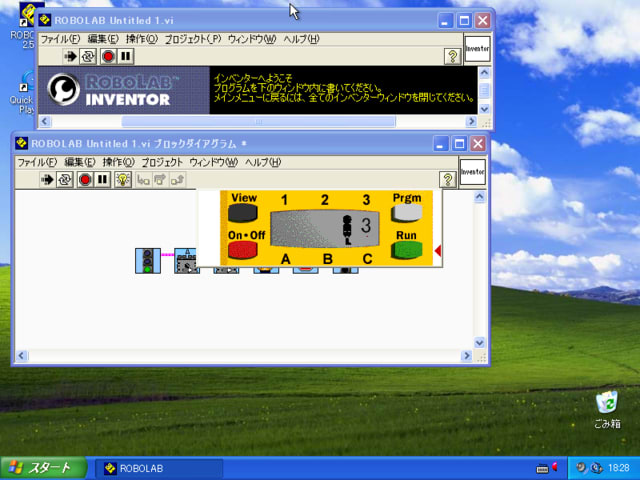

「ピロン」って音が鳴ったら転送終了です。(懐かしい!)
RCXのRunボタンを押すと、ポートAとポートCに接続したモーターが2秒間回転します。(つまり、ロボットが2秒間だけ前進します。)
ということで・・・USB接続の赤外線タワーで、ROBOLABのプログラムをRCXに転送することができるようになりました。
いや~ 本当に ここまで 長かった!
続きの記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その20
前の記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その17
もう何世代も前の LEGO MINDSTORMS RCX を今のWindows10で動かそう・・・というプロジェクトですが・・
一応は、「プログラムの開発」⇒「ロボットを動かす」まで出来ました。
出来たのですが・・・
一番面倒なのは、赤外線タワーです。
現状で使えるのは、シリアル版(RS232C版)の赤外線タワーだけで、USB版のタワーが使えません。
PCとの接続で、USBポート ⇒ USB-RS232C変換ケーブル ⇒ RS232Cケーブル ⇒ 赤外線タワー、というような接続になります。さらに、RS232C用の赤外線ポートには006Pの電池も必要です。(わたしは、使うときだけ電池を入れています)
まず、これが面倒くさい!
せっかく、USB接続の赤外線タワーがあるのだから、これを使えないのでしょうか?
ググると・・・Windows98 や WindowsXP であれば使えるらしい・・・この古いOSを現在の Windowsマシンで動かせるのが、VirtualBoxです。
今回はこれに挑戦です。
参考にしたのは、このページです。
Using your LEGO Mindstorms RCX on a modern computer
まずは、Virtual Boxをダウンロードします。
https://www.virtualbox.org/
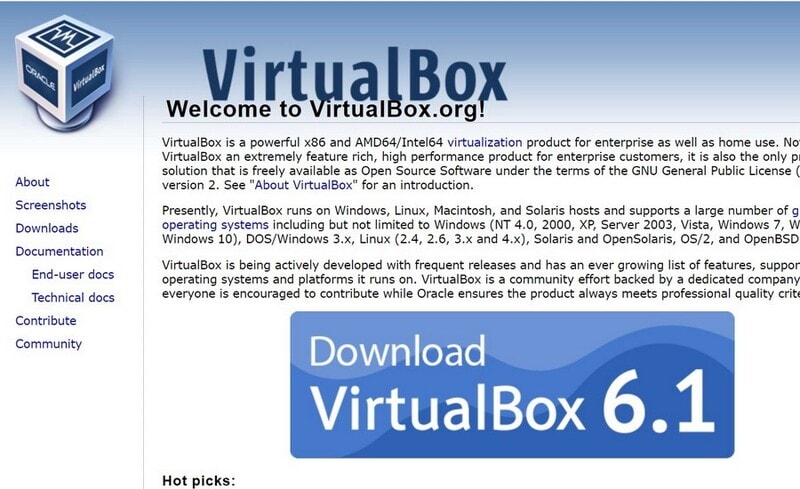
VirtualBox 6.1.18 platform packages の Windows host をクリックして、exeファイルをダウンロードします。
(私が入手したのは VirtualBox-6.1.18-142142-Win.exe でした)
次に、VirtualBoxをインストールします。(今ダウンロードした exeファイルを実行します。)
VirtualBoxのインストーラが起動して、いろいろと聞かれますが・・・よくわからないので、デフォルトのままで次に進みます。

インストール中に「Oracle Corporation ユニバーサル シリアル バス コントローラ」をインストールするか聞けれるので、インストールにしました。(コレUSBのこと!? だよね)
はい、あっさりインストールは終わります。
では、そのままVirtualBoxを起動します。

新しい仮想マシンの作成ということで・・・
ツールバーの「新規」のアイコンをクリックします。
名前:WinXP
マシンフォルダ:デフォルトのまま
タイプ:Microsoft Windows
バージョン:WindowsXP(32bit)
にしました。
その後にメモリーサイズなどいろいろ聞かれるのですが、すべてデフォルトのまま進みました。

とりあえず、仮想マシンができました。
さて、いよいよOSのインストールです。
(本当はWindows98を入れたかったのですが・・・起動ディスク(フロッピー)の作成方法が分からなくて、今回はしかたなくにXPにしました 苦笑)
今度は、「起動」アイコンをクリックします。
PCのDVDドライブに(懐かしの)WindowsXPのCDをセットします。
懐かしい、テキスト形式のインストール画面が表示されます。
CDが読み込まれて、WindowsXPのインストールが始まります。
ライセンス条項に同意する場合は F8キー とか、めっちゃ懐かしい!

一通り読み込みが終わると・・・(バーチャルですが)再起動して・・・
おぉ、XPだっ!
最初の設定項目の中に、Windows のライセンスキー入力とかやらされます・・・ちゃんとキーをCDに貼っておいて良かった!

後は、いろいろ設定すればインストールが終わります。

とりあえず・・・Windows XPが使えるようになりました。
さて、これでやっと、ROBOLABが入れられます・・・長くなったので、続きは次の記事にします。
続きの記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その19
単なるネタ的なものです・・・
ネットで、Nintendo Switch のゲームを探して(適当に見て)いたときの話・・・
新しい Super Mario™ 3D World のページに
Supported Languages:
Japanese, British English, French, German, Italian, Spanish, Korean, Dutch, Portuguese, Russian, Simplified Chinese, Latin American Spanish, Canadian French, Traditional Chinese, American English
と掲載されていました。
https://www.nintendo.com/games/detail/super-mario-3d-world-plus-bowsers-fury-switch/


私としては、英語=米語:American English 逆に British English は「イギリス英語」と分類しています。(あくまで私の分類です 笑)
RoboCupJunior のルールはイギリス英語で書かれています。
だから色は colour です。これがずっと違和感でした。(過去の記事を調べたら・・・他には minimised organisers aluminium Behaviour などがありました)
まあ、ちょっと、こういうところで、American English と British English がきちんと区別されているのを初めて見たので・・・取り上げてみました。
いろいろと新しい情報をアップしてくださると、私のブログネタが続いてありがたいです。(笑)
さて、今年の「ロボカップジュニア日本大会2021オンライン」に向けての情報ですが・・・
レスキュー技術委員会のブログで、今度は、「03/07更新 審査基準正式版公開 動画撮影時のコース例公開」になりました。
https://rcjjrescue.blogspot.com/2021/02/2021.html
掲載されていた「オンライン審査基準」が全てv2.0になったのですが・・・何が、どのように変わったのかが、全くわかりません。何か変更点がわかるようにしていただけるとありがたいのですが、ねぇ。(変更点を赤文字にするとか、変更履歴を書くとか・・・)
で、もう一つが「動画撮影時のコース例」です。
レスキューラインと日本リーグの2つしかありません。(メイズは無いの!?)
中身は・・・こんなコースをロボットが走破するところをビデオに撮りましょう・・・

というサンプルコースのようです。
こういうのがあると、参加チームとしてはビデオを作りやすくて良いですね。
ところで・・・改めて、オンライン審査基準を見てみました・・・
私が んっ! と思ったところを列挙します。
C1:1点「センサーを交換している」って何だろう? 複数のセンサーを試してみたってこと? でもそれは3点にあるし・・・う~ん
C1:2点「実験結果と選択理由がある」この言葉が4点にも書かれています。複数のセンサーを試して、より良いものを選択したってこと? そうすると3点の「複数のセンサーを試している」と何が違うの・・・う~ん
C4:2点「次回機に向けてチャレンジしている」とはどういうことだろう? 今回機はあきらめて、次回機に向けての実験なの? いや、今回機を完ぺきにしてよ・・・う~ん
といったところで、全体的にはハード志向で、LEGOなどの既製品を使うのではなく、一から自作すると得点が高く、また、人と違ったことをやると得点が高くなるように思いました。
やっぱり、高専ロボコンのような感じで、(競技で高得点を得るロボットではなく)アイディア対決なの!? という印象です。
いや、これ、評価者は大変だと思います・・・
今年のロボカップジュニアの日本大会はオンライン(の競技会)になりました。
で・・・その競技会のボランティア募集が掲載されていました。
募集記事が掲載されたのは、サッカーとレスキューです。
レスキューは・・・
https://rcjjrescue.blogspot.com/2021/03/310.html

で・・・オンライン大会なので、会場への移動などは必要なく、ネット環境さえあればどこでも(自宅からでも)お手伝いができるようです。
上の記事では・・・締め切りが3月10日になっています。
この記事が出る前に、前回!? ボランティアをやってくれた人たちにはボランティア募集のメールが来ていました。そのメールが3月5日に来て、締め切りが3月5日だったので、私はあわてて応募しました。
(この記事が出るのであれば、あわてて申請する必要無かった・・・)
ちなみに、私は、(審査基準に納得していないので・・・笑)審査と言うか、採点に関係のない「集計」を希望しました。
スタッフへの応募は、エントリーフォームに入力するので、簡単にできます。
ただ、自筆でサインをした同意書の提出が必要なので・・・あらかじめ、①同意書をダウンロードして印刷、②同意書の内容を読む、③同意書にサイン、④サイン済の同意書をスキャンするか撮影して電子ファイルのする、⑤サイン済の同意書のファイルをアップロード、という作業が必要になります。
同意書には
① 個人情報を、本大会の運営に必要な限度で、かつ、主催者等の指示にしたがって使用する。
② 個人情報の漏洩、滅失又は毀損が発生し、又はそれらのおそれが生じたきは、速やかに主催者等に報告する。
と、曲がりなりにも個人情報を適切に扱うように・・・という条項が書かれているのですが・・・
この同意書やその他の個人情報を集める、運営者側の条項が全く書かれていません。
(せめて、「提出された個人情報は適切に管理する。」とか、「収集した個人情報はxxにのみ使用する」とか、「個人情報の保管期間」など、個人情報の管理や使用条件を明確にして欲しいです。そういったことが考慮されていないところに、個人情報を出したくないですよね・・・相変わらず、他人には厳しく、自分達には甘い! 苦笑)
今回の競技会(まあ、これを競技会と言うのか!?)は、レスキューでは50チームのインタビューが必要なのですが・・・スタッフは揃うのか・・・
RCJJ(RoboCupJunior JAPAN)2021年度の第2回の理事会の議事録が公開されていました。
https://www.robocupjunior.jp/office.html
まあ、今回は、突っ込みどころが少ないです。(笑)
議事録を見てみると・・・
最初が理事の担当の割り当てです。
次にオンライン大会(今年の日本大会のことですね)についての検討ですが・・・
う~んと思ったのは・・・
中島先生の「弁当や交通費の負担~」、オンライン開催だから移動も無ければ、お弁当も無いのじゃないの・・・と思いましたが・・・どこかに大会本部を置いて、重鎮だけ集まるのかなぁ。
それから・・・
各競技の説明で(資料が公開されていないから検討内容は内容はさっぱり分かりませんが)OnStageは勝村さん、サッカーは松山さん、レスキューは森重さんが報告しています。(ここまでは、それぞれの担当理事が報告しているのですが・・・) Rescue Simulation は島谷さんが報告しています。何故、Rescue Simulationだけ担当理事でない人が説明しているの!? Rescue Simulationの担当理事は何やっているの!?
そして、最後の部分
大橋代表理事より、各リーグより講演会の要望があったことを受け、講師へ講演会の打診を することとなった。また、講演会に合わせて簡単な開会式も行うこととなった。
この講演会、というのが良く分かりませんが、開会式の時に誰かの講演をするのでしょう。(きっと)
上の文章の書き方だと、「開会式で講演会をやる」ではなく、「講演会をやるので、ついでに開会式もやろうか」という感じで、主従関係が「主:講演会 従:開会式」のようです。(笑)
いつもの100円SHOPで買い物をしていると・・・見たこともないインスタントラーメンがあったので、興味本位で買ってしまいました。(100円じゃなかったけど・・・)
それが、こちら
SAPPORO MARUYAMA ZOOSHIROKUMA × SHIROKUMA SALT NOODLE

普通に書くと 「札幌円山動物園の白熊 塩ラーメン」ということでしょう。
パッケージの白熊の顔がカワイイ!
裏側の調理方法のイラストの鍋とドンブリが白熊の顔でカワイイ!

開封して出てくるスープの袋も白熊のイメージでカワイイ!

塩味にしては、スープの色が濃いか・・・味もちょっと濃い目の気がします。

シンプルで好きな味です。
あ~ おいしかった!
パッケージの裏に以下の説明がありました。
この商品は円山動物園を応援しています
札幌市円山動物園はホッキョクグマの種の保全に取り組んでおります。活動応援のため売り上げの一部を寄付しております。
だって!
私も、活動を応援したことになるので・・・ちょっとうれしい!(笑)
休日の早朝ドライブ&サイクリング
今回は、東京スカイツリーです。
空が明るくなって、ビルの切れ目から太陽が昇ってきました。

まだ、太陽が出たばっかりなので、まぶしい!

桜の花が咲いていたので、一緒に写真を撮ったのですが・・・
う~ん、イマイチですね。(私の撮影のウデが!)

この東京スカイツリーですが・・・近くから見上げると、迫力ですね!

おまけ
アサヒビールの本社ビル

この謎の金色のオブジェは何なのでしょう!?
ググると・・・
「聖火台の炎」です。
金色の炎は「新世紀に向かって飛躍するアサヒビールの燃える心」を表わしています。
ということです。
私は子供のときから「金色のう〇こ」と言っていました。
「すみだリバーウォーク」で隅田川を渡ります・・・橋の途中に「恋人の聖地」なるものがありました。(笑)


お約束の、鍵が沢山掛かっています。(笑)
本日の早朝ドライブ&サイクリングは浅草
まあ、浅草と言えば雷門と浅草寺ですね。
さすがに早朝なので・・・

私は、観光客であふれている雷門しか知りません。
何、この無人感!(笑)
仲見世通りも・・・まだ、早朝なので誰もいません。

境内も人が少ないですが・・・

でも、もう、こんな時間からお参りしている人は結構います。(おそらく地元の方たちでしょう)
浅草の人たちは信心深いですね。

街の中に、突然現れる遊園地「花やしき」の前の郵便ポスト

ポストの上の「パンダの遊具」がカワイイ!
RCJJレスキュー技術委員会のブログに、今年の日本大会の(レスキュー)の審査基準が掲載されていました。
(V1.0ということで、まだ変更になるかもしれない・・・という注意書きがあります。)
以下、あくまで私個人の感想です。
https://rcjjrescue.blogspot.com/2021/02/2021.html
で・・・まずは Rescue Line のヤツを見てみました。
どうも、今回の大会は、チームアピールのプレゼン大会のようで、この審査基準に従って、どれだけチームが決まった短い時間で高得点のアピールができるかを競う、弁論大会のようなものだと分かりました。
評価項目はこんな感じ・・・

これで、プレゼン賞や技術賞のようなものを決めるのなら良いのですが・・・これで、世界大会に参加するための日本代表(つまり Rescue Line での日本一のチーム)を決めるの!?
高専ロボコンのように「アイディア対決」ならわかるのですが・・・
今回の評価であれば、ライントレースができなくても、ギャップの通過や障害物の回避、傾斜路の通過などが単体でできれば得点になります。
本来の競技では・・・ギャップの通過ができても、ライントレースができなければ得点になりませんよね・・・だから、ライントレースがきちんとできることは、重要性で言えば競技全体の9割以上だと思います。
しかし・・・今回の評価では・・・評価項目J1でライントレースができると1点(たったの1点)
逆に評価項目B2で、モータードライバを自作していると4点(ライントレースの4倍の得点!)
モータードライバを自作することよりもライントレースがきちんとできることの方が100倍重要だと思うのですが・・・
なんか、この得点の割り振りが、全然納得できていません。
(特別なセンサーや、珍しいプログラミング言語を使うことよりも、確実にライントレースをできるロボットを作ることが大切なのではないですか)
本来のレスキューという競技を考えると、ハードが特別に素晴らしくなくても、ソフトが特別に素晴らしくなくても、スタートしてからゴールするまで確実に動くロボットが、良いロボットですよね。
本来の競技の結果ではなく、ロボット工作(ハードウェア)やプログラム(ソフトウェア)の技術力を競う大会にするということでしょうか!?
ということで、今回の大会は、これまでの競技(競技の得点で順位を争っていた)とは全く異なる競技会にするようです・・・
Rescue Maze の審査基準も見ましたが・・・まあ、同じですね。
本来の競技では、いくら素晴らしいカメラを搭載して、色の被災者や文字の被災者を発見できる機能があっても、経路を進める能力が無ければ被災者発見の得点になりません。だから、経路を(きちんと)進む能力は全体の9割以上の評価があっても良いと思います。
でも、今回の大会では・・・評価項目J1で迷路探索ができてもたった2点です。
ところが、評価項目J7で熱の被災者を発見できると4点です。
被災者発見よりも、経路をきちんと進める(これが迷路探索ですね)ことの方が100倍重要ですよね。
ということで、評価項目はさておき、評価の得点が、まったく納得できません。
(まあ、私が納得してないからといって、競技会がどうにかなるわけではありませんけどね)
ところで、評価項目J1には走行前方、J2には走行左側、J3には走行右側、と書かれています。これは何だろう!? ロボットの前にある熱の被災者を発見しなさい。ロボットの右側の実時の被災者、ロボットの左側の色の被災者を発見しなさい・・・ということでしょうか!?
これまでのレスキュー競技は、チームの総合力が重要だと考えています。ハードウェア技術、ソフトウェア技術、チームビルディング、スケジュール管理やコスト管理、設計、開発、テスト、改善のサイクルなど、全体としてどれだけバランス良くこなせるかでしょう。
そういったプロジェクトマネジメントの評価が抜けているように思います。
また、ロボットで言うと、いかにコンパクトに作るか(小ささ)、メンテナンスの簡易化(電池交換が楽ちんとか壊れた部品の交換が簡単など)、ハードの信頼性(壊れないハード、そういう意味ではモータードライバを自作することは逆にマイナス!)、ハード/ソフトの障害切り分けが簡単にできる(ロボット単体でセンサーの値を確認できるとか) こういうところが評価として重要(必要)なのではないかなぁ・・・
まあ、あくまで、私個人の感想です・・・(笑)

| 閲覧 | 573 | PV | |
| 訪問者 | 401 | IP | |
| 閲覧 | 3,261,852 | PV | |
| 訪問者 | 1,142,213 | IP | |
| 日別 | 2,277 | 位 | |
| 週別 | 1,742 | 位 | |





