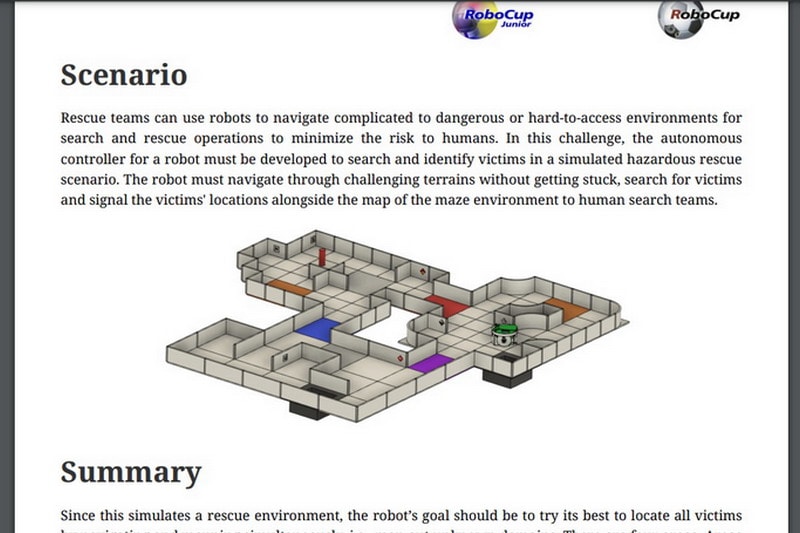
Rescue Simulation 、Rescue Maze と見てきたので、最後は Rescue Line です。(普通と順番が逆ですね・・・)
改版されたルール
RoboCupJunior Rescue Line 2023 (Last updated 2023-05-21版)
を読んで、「んっ!」と思ったところを列挙します。
2.4.5. The field designers will predetermine the number of checkpoint markers and their locations
フィールド設計者は、チェックポイントマーカーの数とその位置を事前に決定します。
フィールドデザイナーが決めるのは「チェックポイントマーカー」の数では無くて、チェックポイントの数ですよね!
2.7.3
複数の傾斜路が連続する場合は、それらを1つの傾斜路とみなします。
それは変わっていません。
例えば2つの(上り)傾斜路が連続する場合、2つの傾斜路を通過すると初めて「傾斜路の得点(1つの傾斜路)」になります。 傾斜路は1つだけど、タイル数は2つのまま。 仮に下の傾斜路にギャップがあった場合、上の傾斜路にロボットが進めればギャップの得点が入る) ⇒
Forum
2.7.4. The ramp will be scored when the robot reaches the horizontal tile at the upper level after an ascending ramp or the horizontal tile at the bottom level after a descending ramp.
ロボットが傾斜路を上って、上の水平タイルに到達するか、傾斜路を下って、下の水平タイルに到達すると、傾斜路の得点が加算されます。
この傾斜路についての記述は変っていないのですが・・・ reach の説明が (項番4.4.6で)明確になったので、傾斜路成功の判断が明確になりました。
ロボットが傾斜路の後の水平タイルにロボットが半分以上入って、なおかつライントレースすれば得点となります。(ロボットが水平になるかどうかは関係ない) 通常は、ロボットが水平になる前に傾斜路の得点が入ることになりますね。
2.9.5. At the exit of the evacuation zone, there is a 25 mm × 250 mm strip of black tape on the floor.
救助ゾーンの出口の床には、25mm × 250mm の黒色テープが貼られています。
2023年ルールでの変更です。 救助ゾーンの出口のテープの色が緑から黒になりました。 緑は避難場所の色に使ったから・・・なのですかねぇ。
2.9.6. The organizers may place an obstacle inside the evacuation zone. In the evacuation zone, organizers may put the obstacle anywhere with a minimum of 10 cm clearance from the wall. Obstacles in the evacuation zone are not scored.
競技運営者は救助ゾーン内に障害物を設置する場合があります。 救助ゾーンでは、競技運営者は壁から少なくとも 10cm の隙間があればどこにでも障害物を置くことができます。 救助ゾーン内の障害物は得点になりません。
ルール2.5.8と重複した内容です。
ただ、表現(記述)は微妙に違います。
ルール2.5.8 obstacles may be placed
ルール2.9.6 organizers may put the obstacle
2.9.7. Safe evacuation points are defined by right-angled triangles with sides of 30 cm x 30 cm.
a. There will be one red evacuation point where the dead victim must be placed by the robot and,
b. There will be one green evacuation point where the living victims must be placed by the robot.
The robot must also place the rescue kit inside the green evacuation point.
2.9.7. 避難場所は、一辺が 30cm × 30cm の直角三角形で定義されます。
a. 死んだ被災者をロボットがそこに配置する必要がある赤い避難場所が 1つあり、
b. ロボットが生きている被災者をそこに配置しなければならない緑の避難場所が 1つあります。
避難場所が2つになりました。緑と赤の2つで、銀の被災者とレスキューキットを緑の避難場所に、黒の被災者を赤の避難場所に入れます。
競技運営者側としては、2つ用意しなければならないので、面倒になりました。
2.9.9. The chosen level is applied for both red and green evacuation points.
選択したレベルは、赤と緑の両方の避難場所に適用されます。
2つの避難場所は同じレベルに設定します。(片方を レベル1、もう片方をレベル2、というような選択はできない)
まあ、そうでしょう!
2.9.11. After a Lack of Progress, the referee may roll the dice again and place the evacuation points in new corners.
競技進行停止の場合、審判は再度サイコロを振り、新しいコーナーに避難場所を配置することができます。
競技進行停止が発生したら、サイコロを振って避難場所の位置を変える・・・これ、実際の競技会(世界大会)でやってるのでしょうか? 現実的にはできないと思います。
ロボットが救助ゾーンに入って、救助ゾーンの中の避難場所の位置を覚えた・・・競技進行停止になったら・・・また、避難場所を探すところから・・・きっとそういうのは想定していないのでしょうね。
しかも、2023年ルールからは避難場所が2つになったし・・・ますます実施困難に・・・
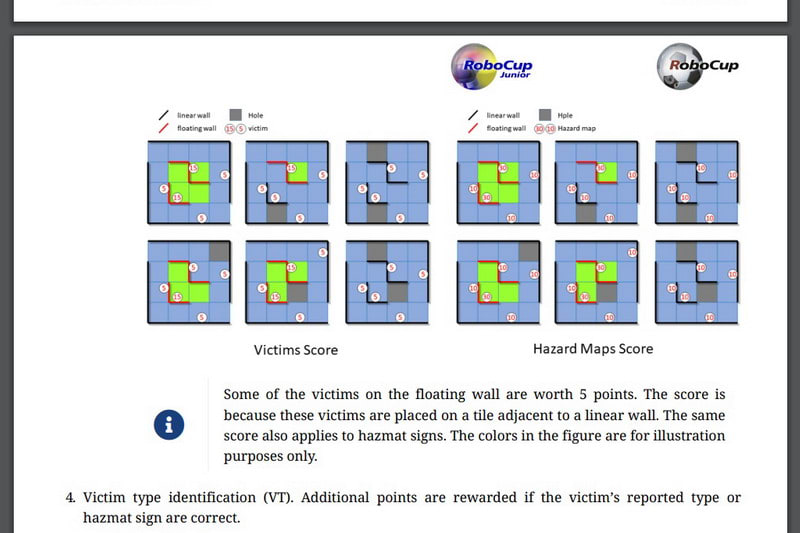
2.9.12の下の絵
ルール本文は 「Level one」、上の図では 「Level 1」と微妙に表現が違います。(表記の統一がなされていない)
それから、レベル2では避難場所の色を判別するためにカメラを搭載するか、専用のカラーセンサーを追加する必要がありますね。
(あと、レベル2の底の三角形に色が付いていないところに注意です!)
2.11.2. Teams can either choose between two strategies:
a. Level one: carry a rescue kit from the start tile and drop it off at the designated evacuation point,
or
b. Level two: to have the rescue kit on the path towards the evacuation zone.
チームは次の 2つの戦略のいずれかを選択できます。
a. レベル1: スタートタイルからレスキューキットを運び、指定された避難場所に降ろします。
または
b. レベル2: 救助ゾーンに向かう経路上にレスキューキットを置くこと。
レベル2はレスキューキットを経路上に置くとしか書かれていません。一方、レベル1はキットを避難場所に入れることが書かれています。(レベル2には書かれていない) これだけ読むと、レベル2ではキットを避難場所に入れる必要が無いのか?(そんなことないよね 笑)
こういった、不整合が気になります。
これ "drop it off at the designated evacuation point" を a. の上(共通部分)に書くべきですよね。
4.4.6. The robot has reached a tile when more than half the robot is within that tile when viewed from above and robot is actively following the line at that point in time.
上から見てロボットの半分以上がタイル内にあり、その時点でロボットが積極的にラインをたどっている場合、ロボットはタイルに到達したことになります。
2023年ルールで大きく変わったのが、この項目です。 これまで、「どうなったら得点になる」が明確ではありませんでしたが、やっと明確になりました。
(これ、いままで、誰も疑問に思わなかったのか? 不思議?)
ロボットが reach the next tile になったら得点と書かれているけど・・・どうなったら reach the next tile になったと認められるの?
ロボットが次のタイルに半分以上入って、なおかつライントレースしていること、と定義されました。
4.5.6. Suppose a lack of progress occurs as the robot exits the evacuation zone while carrying victims. In that case, the victims will be randomly placed in the evacuation zone.
ロボットが被災者を持ったまま救助ゾーンを出た後に、競技進行停止になった場合、被災者はランダムに救助ゾーンに配置されます。
ロボットが被災者を持ったまま救助ゾーンを出てしまった場合ですが・・・
・入り口から出たら逆走なので、競技進行停止で、ボールは救助ゾーンに戻されます。
・ボールを持ったまま出口から出ても競技進行停止ではなりません。(ボールはそのまま)
・ボールを持ったまま出口から出たロボットが競技進行停止になったら、ボールを救助ゾーンに戻す。(たとえロボットが救助ゾーンの前に戻らないとしても)
4.6.1 が得点の説明ですが 4.4.6 が reach の説明になったので、やっと「どうなったら得点になるのか」が明確になりました。
4.6.3の下の図
上の図の説明の中に visit checkpoint があるのですが reach checkpoint が正しいと思われます。
今回、visit → reach の言い換えがあったが、その修正漏れと思われます。
(こういうところも、ちゃんとやってよ!)
4.6.6
a. Level one evacuation point:
▪ (SLVR) = × 1.2 per successful rescue of a living victim.
▪ (SDVR) = × 1.2 per successful rescue of the dead victim if both living victims have already been successfully evacuated.
a. レベル1 避難場所:
▪ (SLVR) = 生きている犠牲者の救助成功ごとに × 1.2
▪ (SDVR) = × 1.2 (生存している被災者の両方が既に救助に成功している状態で、死亡した被災者の救助が成功した)
被災者救助の乗数については、基本的には変ってないのですが・・・逆に変えなくていいの? と疑問です。
疑問なのは死んだ被災者の移送(救助・・・とは言わないよね)についてです。
2023年ルールで黒の被災者は赤の三角形に入れることになりました。
で、ルールでは 銀の被災者を2人を救出した後で無いと、死んだ被災者の乗数が入りません・・・ということは、救助ゾーンで被災者を探すときに、先に(たまたま)黒の被災者を見つけてしまった場合は・・・ストックしておくか、それを無視して別の被災者を探しに行くことになります・・・運ぶ場所が別になったのだから順番は考慮しなくて良いのではないでしょうか?
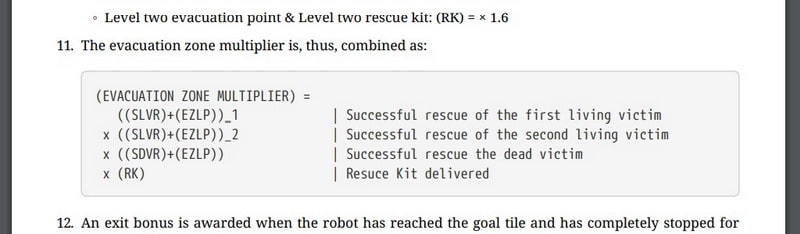
4.6.10. An additional multiplier will be awarded for the rescue kit placed completely inside the green evacuation point, as such:
◦ Level one evacuation point & Level one rescue kit: (RK) = × 1.1
◦ Level one evacuation point & Level two rescue kit: (RK) = × 1.3
◦ Level two evacuation point & Level one rescue kit: (RK) = × 1.2
◦ Level two evacuation point & Level two rescue kit: (RK) = × 1.6
また、表記が Level one になった・・・表記を統一(整理)しましょうよ!
4.6.11 の計算式
まず、
上の式で ((SLVR)+(EZLP))_1 ⇒ ((SLVR_1)+(EZLP)) が正しいと思われます。(あくまで、表記の問題)
まあ、これは、どうでも良い話でした・・・
これまでは、レスキューキットの乗数からも競技進行停止のペナルティ分をマイナスしていたが、今回のルールでは、レスキューキットの乗数からは引かない式になっている。 これで正しいのかなぁ・・・
それから、
被災者の救助ができない場合の計算式はどうなるのでしょうか?
例えば生きた被災者を1人、死んだ被災者を1人、救助した場合は
(SLVR_1 + EZLP) になるでしょうか?
それとも
(SLVR_1 + EZLP)x (1.0 + EZLP) x (1.0 + EZLP) x (1.0) になるのでしょうか?
(救助に成功していない被災者からもEZLPが引かれるのか・・・)
※ Rescue Maze や Rescue Simulation と同じ場所の突っ込みは略
以上です。
2023/6/9 追補
あまり本質的な話では無いですが・・・Rescue Simulation のルールと見比べているときに Rescue Simulationのルールの 6.3.3が Rescue Line のルールに無い、ことに気が付きました。
参考 Rescue Simulation 2023 の 6.3.3
6.3.3. In the event of unexpected issues, the Organizers will do their utmost to avoid any disadvantage to the team.
6.3.3. 予期せぬトラブルが発生した場合、競技運営者はチームに不利益が生じないよう最善の努力を尽くします。
何で、Rescue Line には無いのでしょうか? (Rescue Maze にも無い。 Rescue Simulation のルールだけにはある。 なぜ?)
これが無いってことは、Rescue Line においては、予期せぬトラブルが発生しても、競技運営者は最善の努力をしてくれない・・・ってこと⁉(笑)