








先日のRCJJ関東ブロック大会でのレスキューメイズのロボットです。
4チームのエントリーがあったのですが、1チームは、ロボットが完成せずに不参加になりました。
(そのチームのメンバーは会場に来ていて、スタッフとして手伝ってくれました)
レスキューメイズのロボット
Team "null"

完全な自作ロボットで、駆動系は3Dプリンタによる独自設計です。
ステッピングモーターの回転をベルトで前後の車輪に伝えます。
そして、そのベルト自体がタイヤ替わり(滑り止め)になるという変わった駆動方式でした。
電子回路の基板は、エッチングをして作成したオリジナルな基板で、配線も奇麗です。
ただ、せっかくジャイロを搭載しているのに、ドリフトの制御がうまくいかず、ジャイロを使っていませんでした。
代わりにコンパスセンサーを使用していたので、90度回転がビシッと決まりませんでした。
でも、練習時間の間にステッピングモーターのステップ数で90度回転を制御するようにソフトを変更したらしく、なんとなく迷路探索ができるようになっていました。

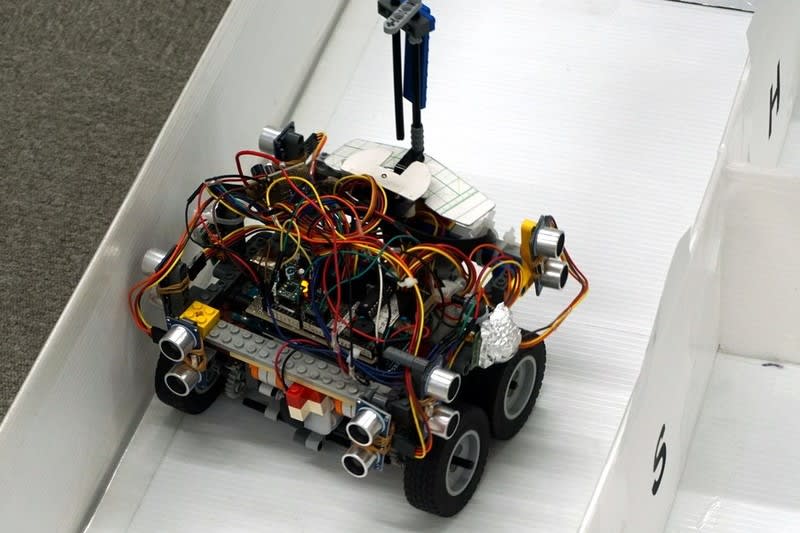
Team "Tamagawa Academy Science Club"

昨年の世界大会参加チームのロボットです。
駆動系(モーターやタイやなど)はLEGOベースですが、コントローラ(コンピュータ)はArduinoというハイブリッドロボットです。
さすがに、迷路抜けや(文字の被災者を含めて)被災者発見は熟成された、すばらしい得点でした。
残念ながら、2回の競技共に満点は逃しましたが・・・
Team "トライベアーII”
こちらも、駆動系はLEGOで、コントローラーは自作のハイブリッドロボットです。
ただ、剛性が弱く、ちょっと触るとセンサーが曲がってしまったり、部品が取れてしまったり・・・
転がると、電池が飛び出したり、基板が外れたり・・・まだ作成途中の仮止めの状況のような感じでした。
回転角を測るジャイロセンサーや傾きを検知する加速度センサーも装備しており・・・一通りの機能は持っているようでした。ただ、温度の被災者の検知が(サーモパイルではなく)人感センサーのため、誤検知(誤発見)が頻繁に発生してしまい、競技結果は勿体ない感じでした。
今、思い出してみると・・・(2019年ルールでは)2.2.7に抵触しているのではないかと・・・(笑)















