いまさら2ヶ月前の関東ブロック大会のレスキューメイズねた です。
RCJJ関東ブロック大会2016の会場になった都立産技高専品川キャンパスのチームです。
私達は、普通に「高専チーム」と呼んでいいます。
まず、チーム名の「LINQ」ですが・・・発音は「リンク」らしいです。
「リンク」と言えば、世界チャンピオンになった偉大な先輩の「LINK」ですよね。
きっと、この偉大な先輩にあやかって命名しているのでしょう・・・
チームメンバーは3人、その中には、過去に世界大会に参加した経験者が含まれています。レスキューメイズ(昨年まではレスキューB)には、3回目の挑戦だったかなぁ。

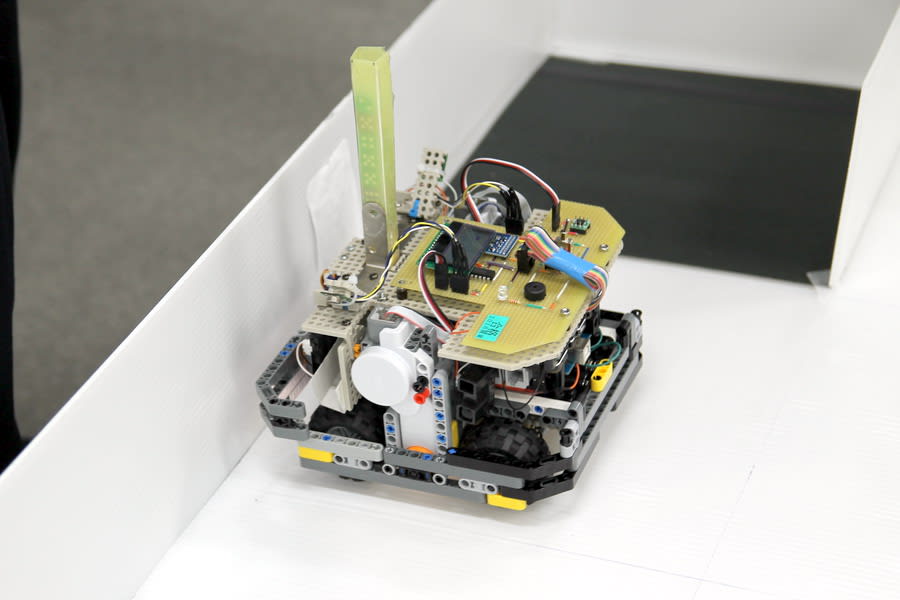
さて、ロボットは・・・う~ん、何だか見たことあるような・・・
前方に2つ、左右に1つずつ配置された、4つの超音波センサー
左右の高いところから下向きに斜めに配置された温度センサー
ロボットの後方に縦置きに並べたNXT用のサーボーモーター
しかも、超音波センサーをSRF05に、温度センサーをTPA81にしたところも、何というか・・・
まるでxxxのロボット!? (笑)
まあ、もともと似ていましたけどねぇ。
NXTのセンサーポートを拡張するためにArduinoを使っているのも同じですが・・・こちらの方が基板周りが美しい! 配線も綺麗!
レスキューキットはロボットの真ん中に板状のものを積み上げてサーボモ-ターで左右に落とします。これは teamAdvance に似てる。
さらに・・・足回りがクローラなのですが・・・クローラの車輪を自作している・・・。これが、2013年に世界大会に参加した「Inertia」に似てる。
ということで・・・いろいろ寄せ集めとか言われてました。
まあ、冗談はここまでにして、ハードを見てみると、とってもコンパクトにまとめられ、必要なセンサーも揃っています。レスキューキットも真横に落とせるので、被災者を発見すれば、そのままの姿勢で落とすだけ・・・

ロボットのハードは、なかなかコンパクトにまとまっていて、素晴らしい出来です。「花鳥風月」のロボットもLEGOロボットとしてはコンパクトですが、さらにコンパクトにできている感じです。配線も最低限の部分だけが露出していて、とってもすっきりしています。Arduinoの周りもプリント基板を使用していて、整理されています。レスキューキットのストッカーも綺麗に作られています。ただ、キットを送り出す滑り台が紙で作られています。(それは良いのですが・・・)養生テープで貼り付けてあるところが・・・笑えます。(そこまで「花鳥風月」のマネをしなくて良いです・・・笑)
これは、なかなか期待させます。
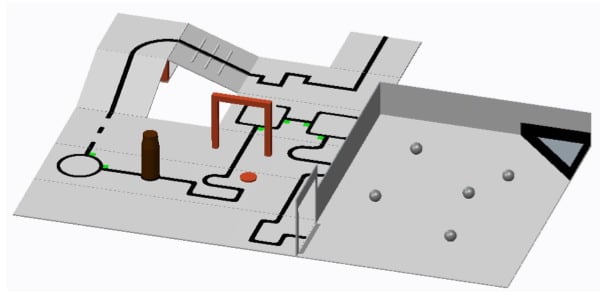
プログラムの方も・・・プレゼンポスターを見るとマッピングは勿論、迷路探索もばっちりのようです。
これは、なかなか期待させます。
で・・・実際の競技では・・・
迷路を進んで、被災者を発見する・・・という動きは、できてるっちゃできてる。でも、やっぱり精度がいまいちです。一回目は3人の被災者を発見して115点、二回目も3人の被災者を発見して105点と振るわずに終わってしまいました。
プログラムの精度を上げれば、もっともっと行ける、と思うのですが・・・
相変らず、一人の被災者に沢山のレスキューキットを配る豪快さ、は健在でした。
どうも、最近の高専チームはハード性能を追及するあまり、ソフト開発期間が圧縮され、ハードのパフォーマンスを十分に発揮できるプログラミングができていないように思います。ジャパンオープンに行けるかどうか微妙な位置ですが・・・プログラムをより熟成してトップを目指して欲しいです。