








前の記事はこちら RoboCupJunior Rescue New Simulation を動かしてみる
前の記事に追補しましたが・・・
(提供されたい一連のモージュールに含まれている)サンプルプログラムを動かすことができました。
でも、このサンプルプログラムですが・・・迷路を探索している感が全くなくて・・・(行き当たりばったりで)なんだかうろうろして、一番近くの穴に落ちる・・・再スタートして、またうろうろして、同じ穴に落ちる・・・(繰り返し)
これは、サンプルとしてダメでしょう!
ということで、もうちょっと迷路を進んでる感がみられるものを作ってみました。
といっても・・・私は Python を知らないので・・・超簡単なプログラム。
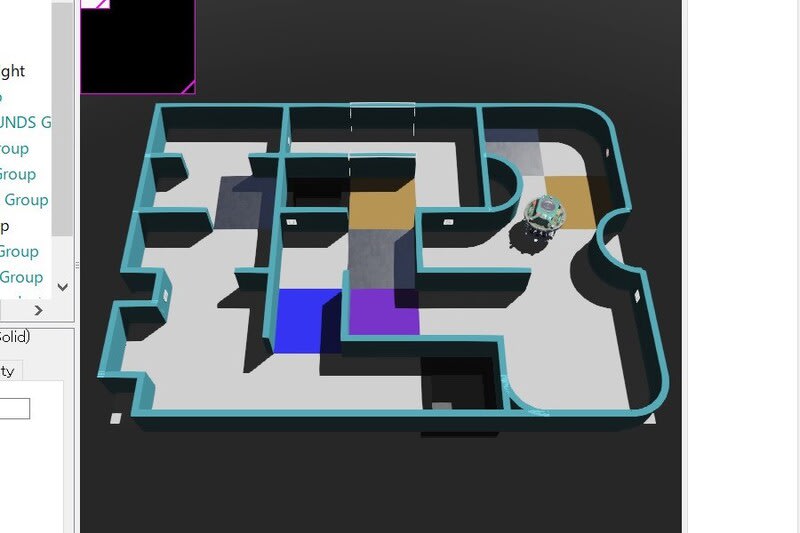
単にロボットの右前の距離センサーで壁との距離を見て、壁に近ければ左回転、壁が遠ければ右回転、ちょうどいい距離なら直進・・・単にそれだけのプログラムで、右手法で進みます。
まあ、これだけだと、やっぱり(外周にある)穴に落ちます。
穴に落ちないためには、穴を認識して回避するしかありません。穴を検知するのは・・・ロボットの下にあるカラーセンサーです。
このセンサーの使い方を研究しないといけないようです。
今回は、各センサーの解説をしてくれるページが揃っていて、分かりやすいです。
と思って SENSOR のところを探しても COLOR Sensor がありません。 だめじゃん!
いや、RGB Camera のところにありました。
https://erebus.rcj.cloud/docs/tutorials/sensors/rgb-camera/

ここに、
As a RGB color sensor to detect environment colors, like the color of the floor (In this case, it may be implemented as a 1px by 1px camera).
床の色などの環境色を検出するRGBカラーセンサーとして(この場合、1px x 1pxのカメラとして実装できます)。
と書かれていました。(分かりにくいけど・・・カメラをカラーセンサーとして使うってこと 贅沢!)
で・・・黒色の床を判断して、回避するプログラムを組んだら、とりあえず、外周を1周できるようになりました。
まあ、やっぱり、自分がプログラムして、その通りにロボットが動いてくれると楽しいですよね!
で・・・いろいろなマップで確認していたら、面白い現象が起こりました。
私のPCではWorld3のマップで発生します。
ロボットが外周を1周半してこまでは順調・・・
ここで・・・
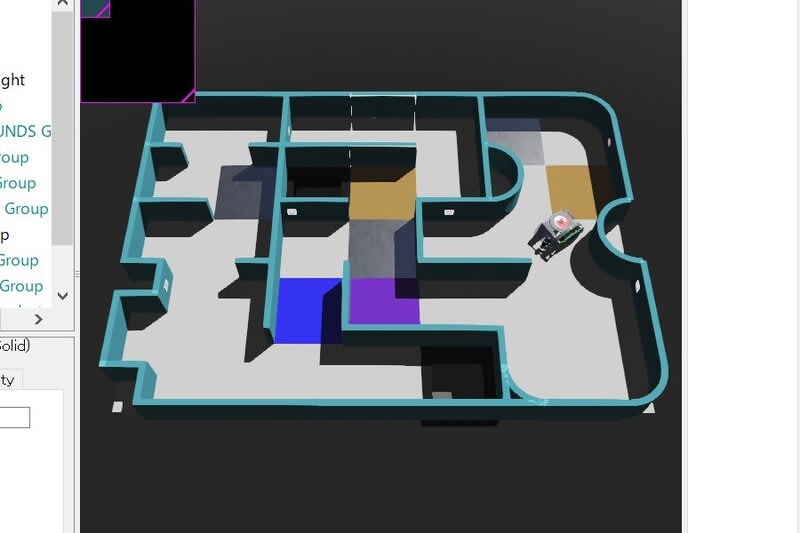
ロボットが突然、倒れます。(何で!? 壁にぶつかったわけでもないのに)

そして・・・飛び上がって、画面から消えた後・・・

落ちてきて、転がって、動かなくなります。(車輪は回転しているので、ロボットとしては頑張って動いている・・・つもり 笑)
これは何だろう!?
面白いけど!?
コンソールには、こんなメッセージが表されます。
WARNING: The current physics step could not be computed correctly. Your world may be too complex. If this problem persists, try simplifying your bounding object(s), reducing the number of joints, or reducing WorldInfo.basicTimeStep.
ということで・・・なんとなく、私のPCでは性能不足なんだろうな・・・と思ってます。















