








今回のお題は「得点」です。
5.5.1 A team will be given 100 points at the beginning of each game.
5.5.2 Collecting objects
A team will gain points by collecting the objects.
To indicate that a robot has collected an object, it must stop and flash the LED for 3 seconds when any one of the colour sensor has detected the object.
a) A real/virtual robot cannot collect more than 6 objects at any one time without placing them in the collection box.
b) Objects in the real world will NOT disappear after they are collected. It is team’s responsibility to program their robot such that it moves away from the same real object and search for others. Collecting the same objects consecutively will not be counted.
c) Objects in the virtual world will disappear after they are collected.
5.5.3 Depositing objects
When a robot deposits objects successfully, the points of the objects deposited will be doubled.
a) Robot in the collection box: A robot is only considered to be in the collection box when both colour sensors detect the collection box (both colour sensors are in the collection box).
b) Robot successful object deposit: A robot must
・stop inside the collection box;
・turn on the LED for 3 seconds (with a steady light) to indicate the depositing process;
・exit the collection box autonomously after deposition (both colour sensors are out of the collection box).
5.5.4 Bonus points (only for WORLD_1)
a) For every ONE set of RED, CYAN and BLACK objects collected and deposited successfully (in one single trip to the collection box) in WORLD_1, 90 bonus points will be rewarded. There will be no SUPER objects generated in WORLD_1.
b) For every TWO sets of RED, CYAN and BLACK objects collected and deposited successfully (in one single trip to the collection box) in WORLD_1, 180 bonus points will be rewarded. There will be no SUPER+ objects generated in WORLD_1.
5.5.5 Communication and Teleportation
a) For successful teleportation, teams will be given 100 bonus points. Teams can choose a location in WORLD_2 that the robot will be teleported to.
b) For unsuccessful teleportation, the robot will be placed in WORLD_2 by the CoSpace server. No bonus will be given. Teams cannot choose the location in WORLD_2 that the robot will be teleported to.
5.5.1 チームには、各々の競技の最初に100点の得点が与えられます。
5.5.2 オブジェクトの収集
チームはオブジェクトを収集すると得点になります。
ロボットがオブジェクトを収集したことを示すために、(少なくとも)どちらかのカラーセンサーがオブジェクト(の色)を検知したところで、ロボットを止めて3秒間LEDを点滅させます。
a) 現実/仮想ロボットは、収集箱にオブジェクトを入れない限り、6個以上のオブジェクトを収集(搭載)することができません。
b) 現実世界では、オブジェクトは収集されても消えません。実際のオブジェクトからロボットを遠ざけて別のオブジェクトを探すようにプログラムをしなければなりません。連続して同じオブジェクトを発見しても得点になりません。
c) 仮想世界では、オブジェクトは収集されると消えます。
5.5.3 オブジェクトの格納
ロボットが正しくオブジェクトを収集箱に格納することができれば、そのときに収集箱に入れたオブジェクトの得点が2倍になります。
a) ロボットが収集箱の中に入った: ロボットの両方のカラーセンサーが収集箱(の色)を検知していれば、ロボットが収集箱にオブジェクトを格納したと判断されます。
b) 収集箱への格納: ロボットが以下の動作をした場合に収取箱への格納が成功したと判断されます。
• ロボットが収集箱の中で停止
• 格納の動作を示すために、3秒間、LEDを点灯します。
• そのあとに、ロボットが自力で収集箱の外に出ます。(ロボットの両方のカラーセンサーが収集箱から出ます。)
5.5.4 ボーナス得点(WORLD_1のみ)
a) (オブジェクトの収集から収集箱へ入れる)一連の収集過程のなかで、「赤」「シアン」「黒」の3種類のオブジェクトを揃えて収集箱に入れると90点のボーナス得点が得られます。WORLD_1ではスーパーオブジェクトは発生しません。
b) (オブジェクトの収集から収集箱へ入れる)一連の収集過程のなかで、「赤」「シアン」「黒」の3種類のオブジェクトを2組揃えて収集箱に入れると180点のボーナス得点が得られます。WORLD_1ではスーパープラスオブジェクトは発生しません。
5.5.5コミュニケーションとテレポーテーション
a) テレポーテーションに成功すると、チームは100点のボーナス得点が得られます。 チームは、テレポートした先のWORLD_2の開始場所を(3つの場所から)選ぶことができます。
b) テレポーテーションに失敗した場合でも、競技開始から5分が経過したらCoSpaceサーバによりロボットはWORLD_2に移動します。ただし、ボーナスは得られません。チームは、テレポートした先のWORLD_2の開始場所を選ぶことができません。
こんな感じでしょうかねぇ。
長いので2つに分けます。
得点についてです。
5.5.1 競技前にそれぞれ100点が与えられていて、そこから競技スタートになります。
ということは、3分経っても来ないで不戦勝になった場合は500点対100点になるってこと!?
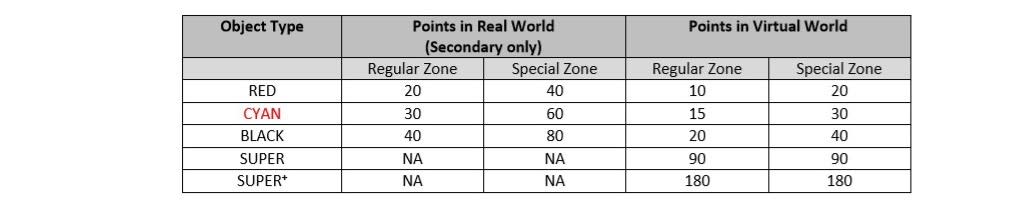
5.5.2 オブジェクト収集の得点です。
表にあるように、色によって得点が異なります。
あれっ・・・WORLD_1 と WORLD_2 でも違いますね。
さらに、スペシャルゾーンの中での得点は、通常の得点の2倍です。 これはお得です(笑)
表の下のa)b)c)は注意書きで・・・
・ロボットが一度に収集できる(搭載できる)オブジェクトは6個です。つまり6個のオブジェクトを搭載している時には、別のオブジェクトを発見したとしても、オブジェクトを搭載できません。(得点にならない) しかし、収集箱に入れば、搭載しているオブジェクトを収取箱に入れることになるので、また新たに6個のオブジェクトを収集することができるようになります。
・現実世界の競技では、ロボットがオブジェクトを発見して搭載したとしても、オブジェクトは消えません。だから、結果的に同じオブジェクトを何度も発見することがありますが、ちゃんと別のオブジェクトを探しに行ってね・・・ここは紳士的な対応が必要なようです。
これまで何度も書きましたが・・・大昔は、現実世界の競技の時に、発見したオブジェクトを審判が取り除いていたのですが、面倒になったのでしょう。(笑)
・逆に、仮想世界では、ロボットがオブジェクトを収集すると、オブジェクトが消えます。(消える訳ではなく、ロボットに搭載された、ということでしょう。)
5.5.3 収集したオブジェクトと収集箱に入れる得点です。
・ロボットが収取箱に入って止まる
・3秒間LEDを点滅
・ロボットが収取箱から出る
これらの一連の動作をこなすと、収集箱への格納の得点になります。収集したときの得点が100点なら+100点、収集したときの得点が400点なら+400点になります。
5.5.4 WORLD_1で、オブジェクトの収集→収集箱への格納 の一連の動作で「赤」「シアン」「黒」の3種類のオブジェクトを揃えていると90点のボーナス点になります。 また、「赤」「シアン」「黒」の3種類のオブジェクトを2組揃えていると180点のボーナスになります。
これは、意外と大きなボーナス得点です。例えば、ロボットが「赤」「赤」「黒」「黒」と4つのオブジェクトを搭載しているときに「黒」を発見しても無視するという作戦もあります。(「シアン」を収集すればボーナス得点になるので)
5.5.5 テレポーテーションに成功すると100点の得点になります。失敗すると(5分経過してもテレポーテーションしないと)強制的にテレポーテーションして、100点の得点も得られません。









