








実家に行ったときに扇風機を貰いました。
これが・・・10年くらい前のものですが・・・まあ、普通に使えそうです。

何気なく箱を見ると・・・
マイナスイオン発生装置付き!

このマイナスイオン発生装置とはどういうものなのでしょうか?
実家に行ったときに扇風機を貰いました。
これが・・・10年くらい前のものですが・・・まあ、普通に使えそうです。
何気なく箱を見ると・・・
マイナスイオン発生装置付き!
このマイナスイオン発生装置とはどういうものなのでしょうか?
「得点」の続きです。
5.5.6 Falling into a Trap
If a virtual/real robot falls into a trap (refer to section 3.8), all objects that have been collected but not yet placed in the object collection box (refer to section 3.14) will disappear. Therefore, the points awarded for those objects collected will be deducted.
A virtual/real robot is considered to be in the trap if any one of the robot’s colour sensor has detected the trap.
5.5.7 Falling into a Swampland (Secondary Category - WORLD_2 Only)
If a robot falls into a swampland (refer to section 3.9), the robot’s speed will be reduced by 80% by the CoSpace server.
A virtual/real robot is considered to be in a swampland if any one of the colour sensor has detected the swampland.
5.5.8 Falling into a Signal Block Zone (Secondary Category - WORLD_2 Only)
A virtual robot is considered to be in a signal block zone if the centre of the robot is within the zone. The centre coordinates is provided to teams by the CoSpace server.
5.5.9 Out of Boundary (Secondary Category - WORLD_2 Only)
A virtual robot is considered out of boundary if the centre of the robot is outside the WORLD_2.
5.5.10 Game Points
After each match, following GAME POINTS will be given accordingly.

5.5.6 罠にはまる
仮想/現実のロボットが罠(3.8参照)に入ると、その時に、収集したが収集箱(3.14参照)に入れていないオブジェクトは消えてしまいます。それら(消えてしまった)オブジェクトを収集したことで得られた得点は差し引かれます。
ロボットのカラーセンサーが罠(の色)を検知した場合に、ロボットが罠に入ったと判断されます。
5.5.7 沼地にはまる(セカンダリのWORLD_2のみ)
ロボットが沼地(3.9を参照)に入ると、ロボットの速度がCoSpaceサーバにより80%減ります。どちらかのカラーセンサーが沼地(の色)を検知した場合に、ロボットが沼地に入ったと判断されます。
5.5.8 信号ブロック領域にはいる(セカンダリのWORLD_2のみ)
ロボットの中心が領域に入ることで、信号ブロック領域に入ったと判断されます。 領域の座標はCoSpaceサーバによってチームに提供されます。
5.5.9 境界から出た(セカンダリのWORLD_2のみ)
ロボットの中心がWORLD_2の外側に出てしまった場合に、ロボットは境界から出てしまったと判断されます。
5.5.10 勝ち点
それぞれの競技の後に、勝ち点が競技の結果によって与えられます。
こんな感じでしょうかねぇ。
得点の続きです。
5.5.6 罠です。得点というより減点です。ロボットが罠に入ると、ロボットが搭載しているオブジェクトが消えてしまいます。(すでに収集箱に入れたオブジェクトは消えない。) それだけでなく、収集したときの得点も消えてしまいます。(これは、精神的にも厳しい 笑)
5.5.7 沼地です。(セカンダリのWORLD_2のみ) これは得点的には関係ありません。ロボットのスピードが5分の1になるだけです。沼地に入ったからと言って減点にはならないのですが、時間が無駄になります。ですから、なるべく入らないが吉です。
5.5.8 信号ブロック領域です。(セカンダリのWORLD_2のみ) これも得点的には関係ありません。ロボットの現在位置(座標)が読み取れなくなる領域です。信号ブロック領域に入ったからと言って減点にはなりません。(というか、どこが信号ブロック領域なのかは競技をやってみないとわからない)
5.5.9 セカンダリのWOLRD_2は、境界に何もありません。(他の競技は、壁があるので、論理的、物理的にロボットが領域外に出ることがない)ロボットが領域外に出ると原点にはなりませんが、時間が無駄になります。
5.5.10 それぞれの競技終了後に勝ち点(勝ち:3点 引き分け:1点 負け:0点)が与えられます。この勝ち点が関係あるのは予選リーグだけですが・・・
今回のお題は「得点」です。
5.5.1 A team will be given 100 points at the beginning of each game.
5.5.2 Collecting objects
A team will gain points by collecting the objects.
To indicate that a robot has collected an object, it must stop and flash the LED for 3 seconds when any one of the colour sensor has detected the object.
a) A real/virtual robot cannot collect more than 6 objects at any one time without placing them in the collection box.
b) Objects in the real world will NOT disappear after they are collected. It is team’s responsibility to program their robot such that it moves away from the same real object and search for others. Collecting the same objects consecutively will not be counted.
c) Objects in the virtual world will disappear after they are collected.
5.5.3 Depositing objects
When a robot deposits objects successfully, the points of the objects deposited will be doubled.
a) Robot in the collection box: A robot is only considered to be in the collection box when both colour sensors detect the collection box (both colour sensors are in the collection box).
b) Robot successful object deposit: A robot must
・stop inside the collection box;
・turn on the LED for 3 seconds (with a steady light) to indicate the depositing process;
・exit the collection box autonomously after deposition (both colour sensors are out of the collection box).
5.5.4 Bonus points (only for WORLD_1)
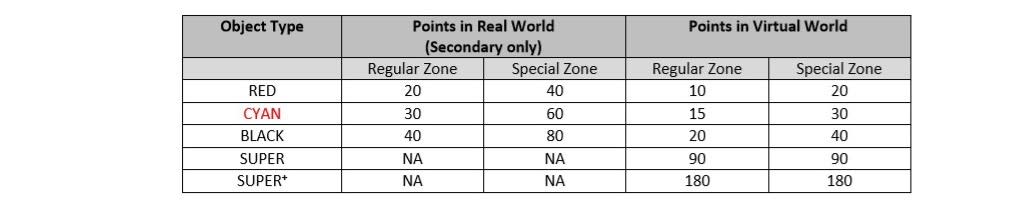
a) For every ONE set of RED, CYAN and BLACK objects collected and deposited successfully (in one single trip to the collection box) in WORLD_1, 90 bonus points will be rewarded. There will be no SUPER objects generated in WORLD_1.
b) For every TWO sets of RED, CYAN and BLACK objects collected and deposited successfully (in one single trip to the collection box) in WORLD_1, 180 bonus points will be rewarded. There will be no SUPER+ objects generated in WORLD_1.
5.5.5 Communication and Teleportation
a) For successful teleportation, teams will be given 100 bonus points. Teams can choose a location in WORLD_2 that the robot will be teleported to.
b) For unsuccessful teleportation, the robot will be placed in WORLD_2 by the CoSpace server. No bonus will be given. Teams cannot choose the location in WORLD_2 that the robot will be teleported to.
5.5.1 チームには、各々の競技の最初に100点の得点が与えられます。
5.5.2 オブジェクトの収集
チームはオブジェクトを収集すると得点になります。
ロボットがオブジェクトを収集したことを示すために、(少なくとも)どちらかのカラーセンサーがオブジェクト(の色)を検知したところで、ロボットを止めて3秒間LEDを点滅させます。
a) 現実/仮想ロボットは、収集箱にオブジェクトを入れない限り、6個以上のオブジェクトを収集(搭載)することができません。
b) 現実世界では、オブジェクトは収集されても消えません。実際のオブジェクトからロボットを遠ざけて別のオブジェクトを探すようにプログラムをしなければなりません。連続して同じオブジェクトを発見しても得点になりません。
c) 仮想世界では、オブジェクトは収集されると消えます。
5.5.3 オブジェクトの格納
ロボットが正しくオブジェクトを収集箱に格納することができれば、そのときに収集箱に入れたオブジェクトの得点が2倍になります。
a) ロボットが収集箱の中に入った: ロボットの両方のカラーセンサーが収集箱(の色)を検知していれば、ロボットが収集箱にオブジェクトを格納したと判断されます。
b) 収集箱への格納: ロボットが以下の動作をした場合に収取箱への格納が成功したと判断されます。
• ロボットが収集箱の中で停止
• 格納の動作を示すために、3秒間、LEDを点灯します。
• そのあとに、ロボットが自力で収集箱の外に出ます。(ロボットの両方のカラーセンサーが収集箱から出ます。)
5.5.4 ボーナス得点(WORLD_1のみ)
a) (オブジェクトの収集から収集箱へ入れる)一連の収集過程のなかで、「赤」「シアン」「黒」の3種類のオブジェクトを揃えて収集箱に入れると90点のボーナス得点が得られます。WORLD_1ではスーパーオブジェクトは発生しません。
b) (オブジェクトの収集から収集箱へ入れる)一連の収集過程のなかで、「赤」「シアン」「黒」の3種類のオブジェクトを2組揃えて収集箱に入れると180点のボーナス得点が得られます。WORLD_1ではスーパープラスオブジェクトは発生しません。
5.5.5コミュニケーションとテレポーテーション
a) テレポーテーションに成功すると、チームは100点のボーナス得点が得られます。 チームは、テレポートした先のWORLD_2の開始場所を(3つの場所から)選ぶことができます。
b) テレポーテーションに失敗した場合でも、競技開始から5分が経過したらCoSpaceサーバによりロボットはWORLD_2に移動します。ただし、ボーナスは得られません。チームは、テレポートした先のWORLD_2の開始場所を選ぶことができません。
こんな感じでしょうかねぇ。
長いので2つに分けます。
得点についてです。
5.5.1 競技前にそれぞれ100点が与えられていて、そこから競技スタートになります。
ということは、3分経っても来ないで不戦勝になった場合は500点対100点になるってこと!?
5.5.2 オブジェクト収集の得点です。
表にあるように、色によって得点が異なります。
あれっ・・・WORLD_1 と WORLD_2 でも違いますね。
さらに、スペシャルゾーンの中での得点は、通常の得点の2倍です。 これはお得です(笑)
表の下のa)b)c)は注意書きで・・・
・ロボットが一度に収集できる(搭載できる)オブジェクトは6個です。つまり6個のオブジェクトを搭載している時には、別のオブジェクトを発見したとしても、オブジェクトを搭載できません。(得点にならない) しかし、収集箱に入れば、搭載しているオブジェクトを収取箱に入れることになるので、また新たに6個のオブジェクトを収集することができるようになります。
・現実世界の競技では、ロボットがオブジェクトを発見して搭載したとしても、オブジェクトは消えません。だから、結果的に同じオブジェクトを何度も発見することがありますが、ちゃんと別のオブジェクトを探しに行ってね・・・ここは紳士的な対応が必要なようです。
これまで何度も書きましたが・・・大昔は、現実世界の競技の時に、発見したオブジェクトを審判が取り除いていたのですが、面倒になったのでしょう。(笑)
・逆に、仮想世界では、ロボットがオブジェクトを収集すると、オブジェクトが消えます。(消える訳ではなく、ロボットに搭載された、ということでしょう。)
5.5.3 収集したオブジェクトと収集箱に入れる得点です。
・ロボットが収取箱に入って止まる
・3秒間LEDを点滅
・ロボットが収取箱から出る
これらの一連の動作をこなすと、収集箱への格納の得点になります。収集したときの得点が100点なら+100点、収集したときの得点が400点なら+400点になります。
5.5.4 WORLD_1で、オブジェクトの収集→収集箱への格納 の一連の動作で「赤」「シアン」「黒」の3種類のオブジェクトを揃えていると90点のボーナス点になります。 また、「赤」「シアン」「黒」の3種類のオブジェクトを2組揃えていると180点のボーナスになります。
これは、意外と大きなボーナス得点です。例えば、ロボットが「赤」「赤」「黒」「黒」と4つのオブジェクトを搭載しているときに「黒」を発見しても無視するという作戦もあります。(「シアン」を収集すればボーナス得点になるので)
5.5.5 テレポーテーションに成功すると100点の得点になります。失敗すると(5分経過してもテレポーテーションしないと)強制的にテレポーテーションして、100点の得点も得られません。
はい、タイトルのとおりです。
日本を食べました。



まあ、連日の暑さで、ちょっと溶けかかっていましたけど・・・(笑)
ポップライスにチョコレートをコーティングした、ライスチョコを高級にした「ような」感じです。
チョコの味は、いかにも外国製!
残りは、友達と一緒に食べる・・・と Y が持ち帰りました。
Rescue CoSpace の CsBot が版数アップしていました。
CSR-Rescue2017-V17.03.07
HPには、本日アップされたようです。
CsBotは新しくなったのですが・・・練習用マップファイルが(いつのまにか)消えてしまいました。(涙)
今回のお題は「競技手順」です。
5.4.1 A referee is an official who receives and uploads teams’ programs as well as runs the games.
5.4.2 At the end of each programming period
a) The chief judge will announce the time for program submission in the competition hall.
b) Each team must submit their first AI strategy which is created during the programming period (we’ll call it AI_1) to the chief judge.
5.4.3 5 minutes before each game
a) Team captains must report to the referee at the respective game stations.
b) Teams are allowed to change the AI before each game (ONLY ONCE) and submit the revised version to the referee. The referee will continue to use AI_1 if there is no revised AI submitted.
5.4.4 3 minutes after the scheduled game time
a) If a team has not arrived at the game station 3 minutes after the scheduled game time, the team will forfeit the game. The opponent will gain 500 points and be declared as the winner. Kindly note that the scheduled game time might be delayed.
5.4.5 Pre-match Meeting
a) Each team will be assigned a team colour (BLUE or RED). At the start of the game, the referee will toss a coin. The result determines the teams’ colour.
5.4.6 Start of Play
a) Real game (Secondary Category Only)
・Teams should program and download the code to the real robot before the real game. It is team’s responsibility to ensure that the correct program is downloaded to the correct robot.
b) Virtual game
・The referee will upload the programs to the CoSpace server, place the team’s robot in the starting point in the virtual world and start the virtual game.
・It is the team captain’s responsibility to ensure the correct program is uploaded.
・Team captains must be present during the full length of the game.
5.4.1 審判がチームからプログラムを受け取り、アップロードして競技を実行します。
5.4.2 プログラミング提出の〆切:
a) 主審は、プログラム提出の〆切の区切りを提示します。
b) 提示された〆切のとおりに、各々のチームは主審にプログラミングをする時間(AI_1と呼ばれる)の間に作成したAIのプログラムを提出します。
5.4.3 各々の競技の5分前
a) チームキャプテンは、競技場所に行き審判に(来たことを)報告します。
b) チームは、各々の競技の前に(一回だけ)にプログラムを変更して審判に提示することができます。 変更したものが提示されなければAI_1のプログラムをそのまま使用します。
5.4.4 予定の競技開始の3分後
a) チームが予定の競技開始時刻の3分後までに競技場所に来なかった場合、その競技に失格になります。(勝敗としては負け) 相手チームは500ポイントを得て、勝者になります。ただし、予定のゲーム開始時刻が遅れるかもしれない点に注意してください。
5.4.5 競技開始前の協議
a) チームは青か赤のチームカラーを割り当てられます。競技前の協議の時に審判がコインを投げてチームカラーを決定します。
5.4.6 競技開始
a) 現実世界の競技(セカンダリのみ)
・ チームは、現実世界の競技の前に、現実のロボットのプログラミングをしてロボットにダウンロードします。正しいプログラムを適切にロボットにダウンロードすることを、チームが責任を持って実施します。
b) 仮想世界の競技
・ 審判はプログラムをCoSpace Serverにアップロードして、仮想世界の出発点にチームのロボットを置いて、仮想世界の競技を開始します。
・ 正しいプログラムを適切にアップロードすることは、チームキャプテンが責任を持って実施します。
・ チームキャプテンは、競技の開始から終了まで、競技場所に居なければなりません。
こんな感じでしょうかねぇ。
さて、いよいよ競技手順です。ルールの解説らしくなってきました。(笑)
それでは順番見ていきます。
5.4.1 プログラムをCoSpace サーバにアップロードするのは、スタッフが実施するので、チームはプログラムをスタッフに渡します。・・・というのは、仮想世界の競技の話ですね。現実世界の競技の場合は、チーム側でプログラムをロボットにアップロード(ダウンロードかなぁ!?)してから、ロボットをスタッフに渡します。
5.4.2 プログラミングの時間は決まっています。その時間の終わりにはプログラムを(一旦)スタッフに提出します。提出したプログラムは修正できないかというと・・・競技の直前に一回だけ修正できたと思います。この、一旦提出させるのは、競技開始が早いチームも遅いチームも公平にするためだと思います。
で・・・競技フィールドが示されてから、提出締め切りまでの時間を「AI_1」と言うらしいです。
(日本の競技会では、使わない言葉ですよね・・・)
5.4.3 競技開始時刻の5分前には競技場所に居るようにしましょう。と言うか来い!(笑) そして、スタッフに「来ました」と告げましょう。この時に、プログラムの修正があれば入れ替えができます。
5.4.4 競技開始時刻から3分経過しても競技場所に来ないチームは、(その競技は)失格になります。相手チームは500ポイントを得て勝ちになります。(でも、普通の競技だと1,000点は得られると思いますので、いくら不戦勝でも点が低いですよね。)
面白いのは・・・競技時間が遅れることを想定してルールが書かれていることです。
5.4.5 Rescue CoSpace は対戦ゲームなので、競技前に色(赤と青)を割り当てます。この割り当ては競技前のコイントで決めます。(私が関東ブロック大会で運営するときには、キャプテンにジャンケンさせてました)
この、コイントスというのは、あんまり日本ではポピュラーでは無いように思います。 ルールでは審判がコイントスをして、2チームのキャプテンが「表」「裏」を言うのですが、2チームが「表」と言う時もあるでしょう。本来であれば、どちらかのチームキャプテンがコインを投げて、反対側のキャプテンが「表」「裏」を答えるべきかと思います。
ついでに、英語では「head or tail」と言うそうですが、コインの表側に顔が刻まれているからだそうです。名古屋の世界大会の時に日本のコインでコイントスをしたときは・・・「head」が無いのですが・・・(笑)
5.4.6 あれ・・・私が5.4.1で説明したことが、詳しく書いてあります。だとすると、5.4.1は必要ないのでは・・・
今回の燃費は、なかなか良かったです。
575.0kmを走破して、給油量が23.34Lです。
だから、燃費は 24.6km/L です。
高速道路をあまり使わなかったのが、燃費が伸びた要因です。(って、これまでのガソリン車の常識と逆ですね)
ここのところ、暑いので、我慢をせずにクーラーを使っています。クーラーを使うと、電気の消費量が3~5A(アンペア)増えます。電池の(電気の)消費が増えるので、結果的には燃費は悪くなると思うのですが・・・それほど気になりません。
今回のお題は「チームメンバー」です。
5.3.1 As the space around the competition fields is limited (and crowds can result in accidents to robots), only team captain is allowed to move the real robot, based on the stated rules and as directed by the referee.
5.3.3 Other team members (and any spectators) within the vicinity of the real world are to stand at least 150 cm away from the real world while their real robot is active, unless otherwise directed by the referee.
※5.3.2番号抜け
5.3.1 競技フィールドのスペースが制限されるため(そして、事故が起こらないようにするため)ルールや審判に指示に従って、チームキャプテンだけが現実のロボットを操作することができます。
5.3.3 他のチームメンバー(や観客)は、審判からの特別な指示が無ければ、現実のロボットが動作している間、競技フィールドから150cm離れていなければなりません。
こんな感じでしょうかねぇ。
この内容も、他のレスキュー競技に合わせて表現したものと思われます。
実際、競技の時には、チームキャプテンですら現実のロボットを操作することはありません。(競技の最初に審判に渡して終わり)
あとは、腕を組んで見ているしかないです。(競技中に必要なのは Relocate の判断だけです。)
世界大会の直前なのに・・・
ジュニア・ジャパンの国際委員会・世界大会情報のブログの更新が全然ない無いぁ
と思ってしました。
すると、昨日、やっと更新がありました。
http://rcjjinternational.blogspot.jp/2017/07/2017.html
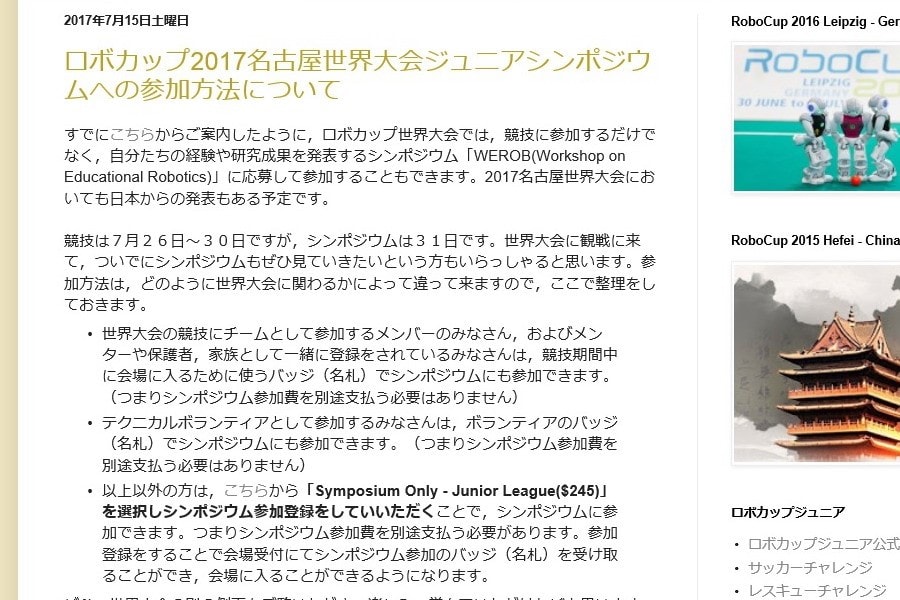
タイトルは、「ロボカップ2017名古屋世界大会ジュニアシンポジウムへの参加方法について」と書かれているのですが・・・ジュニアシンポジウム!? 初めて聞く名です。
内容は、WEROB(Workshop on Educational Robotics)への参加についての案内のようです。
私の認識だと・・・
4日の競技(7月26日~30日)の後にシンポジウムが開催されます。(7月31日ですね)
これを見ると・・・ロボカップというのは研究発表の場だったんだなぁ、と思い出します(笑)
で、このシンポジウムに参加する(発表するのではなく、発表を見に行くこと)のには 245USD の参加費を支払わなければなりません。(245USD と言えんば大金ですよねぇ)
しかし、元々の世界大会の参加者(参加チームメンバーやメンター)は、大会期間のバッチ(いわゆる名札)があれば、そのまま参加できるらしいです。(まあ、一人 160USD を支払っているのだから、当たり前ですよね。)
さらに、ボランティアはボランティアの名札があれば、やっぱりそのまま参加できるそうです。(つまり、無料!)
私は、この245USDという値段が謎です。
競技の4日間は、一般の観客も入場料が必要ですが、1日1,000円、4日間で2,000円だそうです。これに比べても、めっちゃ高いですよね。
で・・・元の話の戻すと・・・ブログが紹介しているのは、シンポジウムではなく、WEROBのことです。これをワークショップと略すのは判るのですが、ジュニアシンポジウムと言う表現は初めて見ました。(勘違いしなければよいけど・・・)
謎なのは・・・RoboCup 2017 NAGOYA のHPのどこにもWEROBのことが書かれていないことです。
本当にあるの?
どこでやるの?
何で、書いてないの?(笑)
ジュニアレスキューも2017年の正式ルールが公開されました。
DRAFT版との細かい比較をしていませんが・・・それほど変わっているようには見えません。
これが、DRAFT版との違いなのか、2016年版との違いなのかが、良く分からないのですが・・・大きな解釈の違いがあります。
3.5.2 A robot is considered to have successfully navigated a hazard (obstacle/intersection/dead end/speed bump/gap) when it has traversed the tile where it was placed without human intervention.
ここにある traversed the tile というのがミソのようで・・・
ロボットがタイルを横断した時(つまり、そのタイルを出て、次のタイルに入った時)に、そのタイルにあった得点が入るというものです。
だから、障害物回避、交差点、行き止まり、スピードバンプ、ギャップのどれもが、ロボットが次のタイルに入った時に得点になります。
同様に、ロボットが逆走を始めて、前のタイルに戻ってしまった時に、競技進行停止になるようです。
ロボットがタイルに入って、そのタイルを出た時に、正しい経路側に出ればOK(得点源があれば得点)、逆に正しくない経路に出ればNGということです。
審判にとっては、判断が明確になったと思います。
じゃあ、こういう場合はどうなの!?
これまでも、良く使われてきた、1つのタイルに2つの交差点のあるヤツ
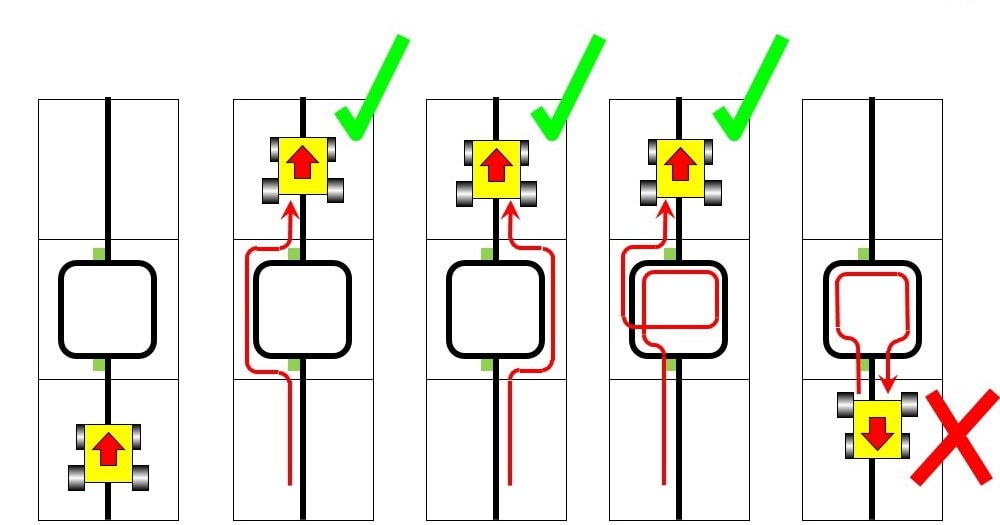
普通に考えれば、最初の交差点で左、次の交差点も左・・・これで30点
もし、ロボットが最初の交差点で右に行ってしまった場合は、競技進行停止・・・だと思うのですが、そうではありません。この場合は、交差点を右に行こうが左に行こうが関係ありません。環状線を何周しようが関係ありません。このタイルを上に出たら、30点(交差点:15点×2)が与えられます。逆に、このタイルを上以外に出たら、競技進行停止になり(たとえ交差点で正しい方向に進んでいたとしても)得点は得られません。
はい、こんな感じです。
じゃあ、ついでに・・・

こんなのは、どうでしょうか?
(A)は、2つの交差点を越えているけど、ギャップを越えていないので30点なのかと思うのですが・・・
(A) (B) (C) どれもが40点です。(交差点:15点×2 ギャップ:10点)
次のタイルに入った時に、(ロボットが入ったタイルが正しい経路であれば)元のタイルにあった「全ての得点」が入ります。
これだと・・・上の2つの例だと、ロボットが(交差点に関係無く)直進すれば得点になってしまう・・・ように思うのですがねぇ。(つまり、 dead reckoning を助長するルールなんじゃないかなぁ 笑)
今回のお題は「練習」です。
5.2.1 Wherever possible, teams will have an access to a practice field for calibration. Teams can calibrate their sensors ONLY before a game at the real field. Calibration is defined as the taking of sensor readings and modifying of the real robot’s program to accommodate such sensor readings. Calibration can be done in as many locations as desired.
5.2.1 チームは較正のために練習フィールドを利用します。チームは競技前に限って、実際の競技フィールドでセンサーの較正をすることができます。較正は、センサーの値を調べて現実のロボットのプログラムに反映することを意味します。較正は、フィ-ルドのどの場所でも行うことができます。
こんな感じでしょうかねぇ。
現実ロボットの練習をイメージして、「練習」としました。
実際に仮想ロボットの練習を(練習フィールド!?で)やらせていたのかというと・・・よくわかりません。
説明の文言は、他のレスキュー競技に合わせてあると思いますが・・・Rescue CoSpace が横並びに論じて良いのか・・・よくわかりません。
関東ブロック大会では、実際の競技を実施するPCで練習をやらせる(試走)をしていました。
上にも書いたように現実ロボットの試走(練習)があります。
でも、仮想ロボット用の試走は無かったような・・・
今回のお題は「事前準備」です。
5.1.1 The layout of both WORLD_1 and WORLD_2 will be released to teams prior to the tournament.
5.1.1 WORLD_1とWORLD_2の競技のレイアウトは競技の前にチームに公開されます。
こんな感じでしょうかねぇ。
短いです。
たったこれだけです。(笑)
内容は・・・競技のフィールドは、競技の前に公開されるよ・・・ということです。
ふつうは、その日の朝に「今日の競技のフィールドを配布するから、みんな取りに来て・・・」という感じです。
世界大会の会場での無線禁止(正確には無線の制限)です。
世界大会のHPの「重要なお知らせ」というところに、「会場での無線LANの使用について」という項目があり、そこに「ロボカップ2017 無線LANの使用に関するガイドライン」というPDFファイルが貼り付いています。
これだけを見ると、無線LANの扱いについて(だけ)のガイドラインに思えるのですが・・・そうではなく、無線全体のガイドラインになっています。
さらに、参加者だけでなく、観客も含めて来場者全員が理解すべき資料になっています。
・・・だけど、みんな、気にしてないよね。(苦笑)
表紙ですが・・・いきなり英語になります。そうです、英語版しかありません。
参加者だけが守れば良いのであれば英語版でも良いのですが・・・来場者全員に守らせるべきなので・・・日本語版も整備して欲しいですね。
それと・・・いつになったら正式版になのでしょうか?(いつまでDRAFT版なの?)
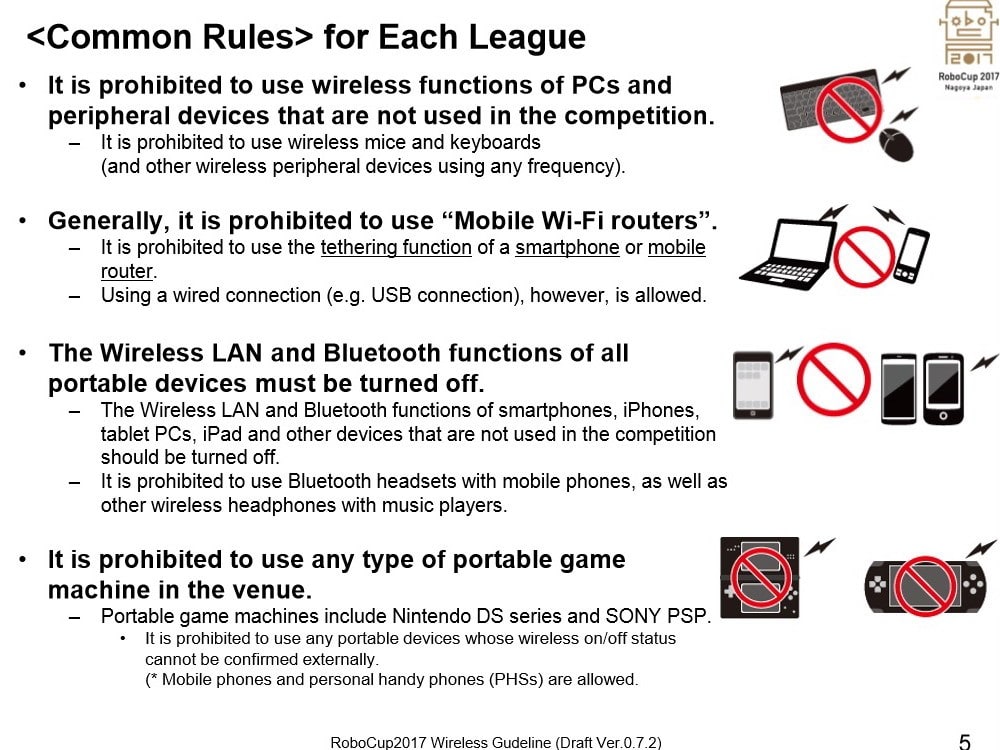
このページが、もっとも重要だと思います。
・競技会で使用されていないPCや周辺機器の無線機能を使用することは禁止します。ワイヤレスマウスとキーボード(および任意の周波数を使用する他のワイヤレス周辺機器)は使用禁止です。
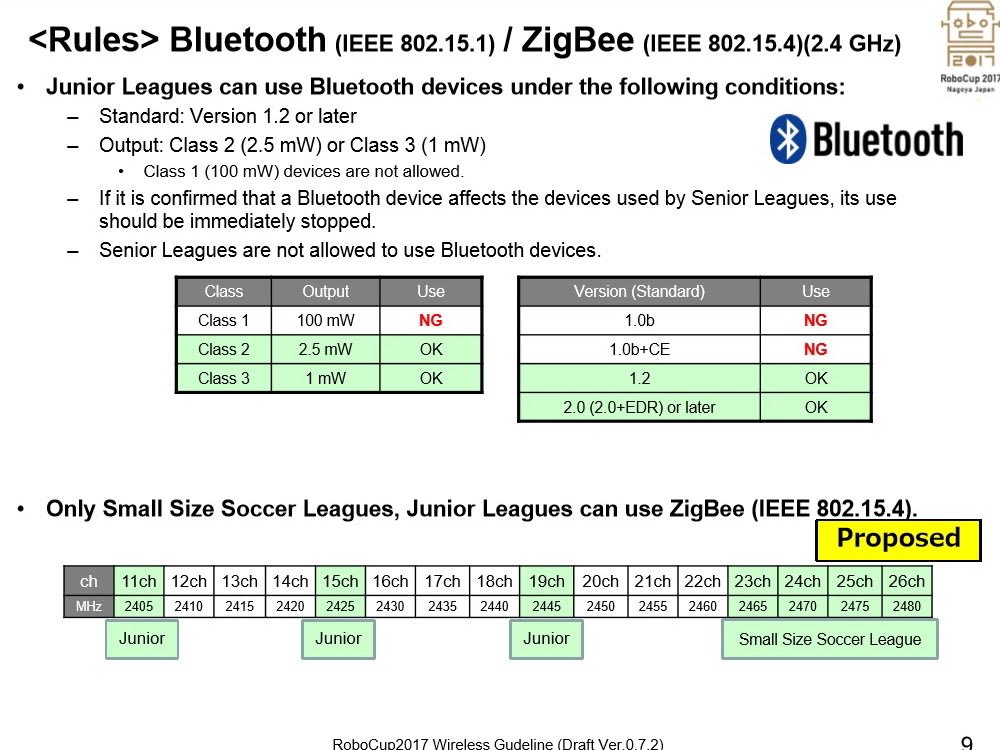
こちらが、ジュニアリーグでの無線の使い方です。
特に重要なのがこちら。
If it is confirmed that a Bluetooth device affects the devices used by Senior Leagues, its use should be immediately stopped.
Bluetoothデバイスがシニアリーグで使用されているデバイスに影響することが確認された場合は、その使用を直ちに停止させます。
メジャーリーグ(なぜ、表記がシニア!?)に影響が有った場合は、(たとえジュニアのルールで使用が許可されていても)使用を禁止します。
メジャー優先、ということです。
何度も書きますが、会場での無線禁止です。
(携帯電話の通話は可能)
さて・・・世界大会まであと2週間ですね。
参加する方々の準備状況はいかがでしょうか?
なんとなく・・・全然情報が入らないなぁ・・・とお嘆きの貴兄に、私の知っている(風のうわさですが)ことを書きます。
まず、日本から世界大会への参加チーム
追加枠があり、サッカーオープンが1枠、ライトウェイトのプライマリとセカンダリも1枠ずつ追加が有ったようです。
レスキューはラインに2枠、メイズに1枠の追加があったようです。
(あとは無し)
勿論、当該チームには連絡が行っていると思いますが、ちゃんとジュニア・ジャパンのHPなどで公開して欲しいですね。
世界大会のボランティアについては、当初想定した十分な数のボランティアが集まっておらず、各競技での割り振りに悩んでいるようです。せっかく申請してくれたボランティアなのですから、きちんとレスポンスを返してあげて欲しいです。まあ、私はRescue CoSpace をお手伝いするつもりだし、他には割り振られないだろうと思っていますが・・・
で・・・ボランティアが十分でないのなら、なぜに追加枠を募集したのか・・・自分達の首を絞める行為の様に思います・・・良く分かりません。
最後が、最終日のシンポジウムの日に開催される「WEROB2017ロボット教育ワークショップ」に、日本から2チームが参加する(発表する)と聞いています。
こういう発表はめったに参加できないと思いますので、出るのも見るのも良い経験になると思います。
それでは、2週間後の世界大会をおたのしみに!
今回のお題は「連携」です。
4.2.1 Both ROBOT_1 and ROBOT_2 must be fully autonomous. The minimum duration of ROBOT_1 movement is 3 minutes and maximum duration is 5 minutes.
4.2.2 Teams need to setup the communication between ROBOT_1 and CoSpace server so that the team can teleport their robots from WORLD_1 to WORLD_2.
4.2.3 Teleportation within the first 3 minutes is invalid.
4.2.4 If a team fails to teleport within the first 5 minutes, the CoSpace server will stop ROBOT_1 and activate ROBOT_2 automatically (refer to section 5.5.5).
4.2.1 ROBOT_1 と ROBOT_2は自律的に動作しなければなりません。ROBOT_1は最短で3分間、最長で5分間動作します。
4.2.2 チームはROBOT_1とCoSpaceサーバの間での通信について設定が必要です。こうすることで、WORLD_1からWORLD_2へのテレポーテーションが可能になります。
4.2.3 テレポーテーションは競技開始後3分が経過するまではできません。
4.2.4 5分が経過してもテレポートしない場合は、CoSpaceサーバが自動的にROBOT_1を停止してROBOT_2を起動します。(5.5.5を参照)
こんな感じでしょうかねぇ。
最初は「Communication」を「通信」と訳していたのですが・・・「連携」に変更しました。
一連の競技は WORLD_1 と WORLD_2 の組み合わせで行われますが、WORLD_1からWORLD_2への切り替えは、各チームの作戦として競技開始3分~5分の間に行われます。
で・・・この章ですが・・・はっきり言って2.3章のテレポーテーションとダブっていると思います。正式版になるときに消えるのではないかと・・・

| 閲覧 | 360 | PV | |
| 訪問者 | 264 | IP | |
| 閲覧 | 3,276,666 | PV | |
| 訪問者 | 1,151,034 | IP | |
| 日別 | 2,900 | 位 | |
| 週別 | 1,882 | 位 | |





