前の記事はこちら RoboCupJunior Rescue Maze – Rules 2020 その2
いよいよ得点の話です。
NEW 4.5.1 To successfully identify within 15 cm a victim, the robot must blink an indicator which is visible to the referee for the full 5 seconds while stationary.
被災者の発見は、ロボットが被災者の15 cm以内に5秒間停止し、その間に審判が明確に認識できるインジケータを点滅させる必要があります。
被災者の発見です。ロボットが被災者から15cm以内に5秒間停止します。その5秒の間ずっと、「審判が明確に認識できる」何らかの視覚的なインジケーターを点滅させます。
まあ、普通は、LEDなどを点滅させます。(点灯ではなく点滅!)
これまでは、LEDの点滅のほかに、「レスキューキットを落とす」という謎の「被災者発見ルール」があったのですが・・・それは消えました。(削除してもらいました)
何でそんなルールが必要なのかを質問したら、「ランプを装備していないロボットが存在するから」でした。レスキューキットの配布装置を装備するよりもランプを装備する方が簡単だと思うのですが・・・やっと、謎ルールが消えてスッキリしました。
これで、被災者の発見は(少なくとも審判にとって)分かりやすくなりました。
NEW 4.5.2 Points are rewarded points for each Successful Victim Identification in the field.
● For victims located on a tile adjacent to a linear wall (even diagonally),
i.e. all victims at the 6 tiles around a linear wall.
a) For heated and visual victims 10 points
b) For coloured victims 5 points
● On other walls (i.e.: floating walls)
a) For heated and visual victims 30 points
b) For coloured victims 15 points
フィールド内で発見した被災者によって得点が得られます。
●線形壁に隣接するタイルに(斜めでも)被災者がいる場合、つまり、線形壁の周りの6つのタイルの犠牲者。
a)暖かい被災者、文字の被災者は10ポイント
b)色の被災者は5ポイント
●他の壁(つまり、フローティング壁)
a)暖かい被災者、文字の被災者は30ポイント
b)色の被災者は15ポイント
被災者発見の得点が見直されました。
片手法でも発見できる位置に設置された被災者は、暖かい被災者(10点)、文字の被災者(10点)、色の被災者(5点)です。
その他の壁(つまり片手法では行けない場所)に設置された被災者は、暖かい被災者(30点)、文字の被災者(30点)、色の被災者(15点)です。
ちゃんとマッピングしないといけない場所の被災者の得点が高くなりましたね。
注意しなければならないのは・・・ルールの文章では「壁」とだけ書かれていますが、黒のタイルも壁と同様に考慮されます。(黒のタイルも通過できない場所なので壁とみなされて、線形壁とフローティング壁の判断に用いられます。判断の例はルールにある図を参照しましょう。)
NEW 4.5.3 To successfully deploy a rescue kit, a robot must deploy (deployment point) a rescue kit completely within 15 cm of the victim. The deployment point is determined by the location of the rescue kit when the robot moves completely out of the 15 cm boundary of the victim.
ロボットが、レスキューキットを被災者から15 cm以内に配置した場合にレスキューキットの配布成功となります。配布の得点は、ロボットが被災者の15 cm境界から完全に移動したときのレスキューキットの位置によって決まります。
レスキューキットの配布の成功の条件ですが・・・
・ロボットが配布したレスキューキットが被災者から15cm以内に「完全に」入っている。
・ロボットが被災者にレスキューキットを配布してから、ロボットが移動して(被災者から)15cmの範囲から出たときのレスキューキットの位置で判断します。
という、2つに変更されました。
これは・・・審判には分かりやすくて良いルール変更です。
4.5.1の被災者発見の判断と合わせて、素晴らしい改善だと思います。
NEW 4.5.4 10 points are awarded per successful rescue kit deployment. The following amounts of rescue kits can score points:
レスキューキットの配布が成功すると10ポイントが得られます。(被災者によって)レスキューキットの得点は以下とおりです。
被災者によって、レスキューキットの必要数が定義されています。ロボットは発見した被災者に合わせてレスキューキットを適切な数だけ配布することで、無駄なく高得点を得ることができます。
レスキューキットの必要数は・・・
①暖かい被災者:1個
②文字の被災者(H):3個
③文字の被災者(S):2個
④文字の被災者(U):レスキューキットは必要ない
⑤色の被災者(赤):1個
⑥色の被災者(黄):1個
⑦色の被災者(緑):レスキューキットは必要ない
こんな感じです。
ロボットが被災者毎に描かれた15cmの円の外に出たときにレスキューキットのある位置で判断できるので、明確です。
じゃあ、ロボットがレスキューキットを配布してから、15cmの円を出る前に競技進行停止になったら、レスキューキットの得点はどうなるのでしょうか!?
4.5.3の後半で、「ロボットが15cmの領域から完全に出たときのキットの位置で判断」となっているので、ロボットが15cmの領域から出ていないので、得点にはならない・・・ということでしょう。
それから、被災者の発見の得点が得られていなくても、レスキューキットの得点は(独立して)得られるのでしょうか!?
ルール上は明確ではないですよね。でも、2019年のシドニー大会での解釈では、独立していました。
4.5.5 Reliability Bonus = (the number of ‘successful victim identification’ x 10) + (the number of ‘successful rescue deployment’ x 10) - (the number of ‘Lack of Progress’ x 10). However, the Reliability Bonus score can only be reduced to the minimum of 0 points.
変更はないのですが・・・ ‘successful rescue deployment’ は successful rescue kit deployment の間違いだと思います。
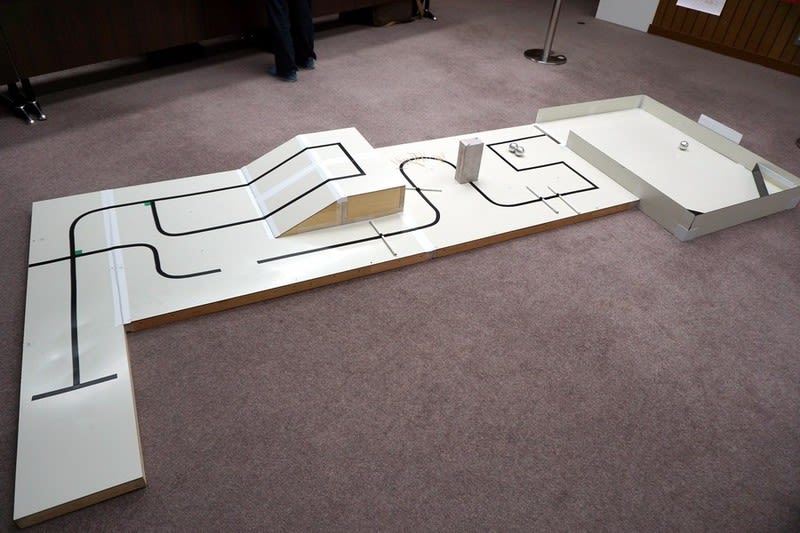
4.5.7 Successful Up Ramp Negotiation. A robot is awarded 10 points for a successful climb up a ramp. To successfully climb up a ramp, a robot needs to move from the bottom horizontal tile before the ramp to the top horizontal tile after the ramp.
4.5.8 Successful Down Ramp Negotiation. A robot is awarded 10 points for successfully landing at the bottom of a ramp. A robot needs to move from the top horizontal tile of the ramp to the bottom horizontal tile of the ramp. A successful landing means that the robot can leave the tile without assistance.
この2項目も変更は無いのですが・・・傾斜路が部屋の中に組みれられたことで、大きな変更になっています。
傾斜路は、上ると10点、下ると10点で往復すると20点なりますね。これまでは、部屋と部屋をつなぐ部分に傾斜路があったので、先の部屋に行って、探索後にスタート地点に戻るためには、必ず往復することになっていたので、(チャント通れば)20点がもらえます。
しかし、今回、部屋の中の経路の一部として傾斜路が組み込まれた(そうしても良いとなった)ので、その傾斜路は一回しか通過しないかもしれません。(傾斜路を往復しなくてもスタート地点に戻れるようなコースレイアウトもありうるということです。) そうすると傾斜路の配置によっては上りだけ、下りだけの10点しかもらえないかもしれません。今後は、それを配慮して迷路探索のプログラムを考えなければならないということでしょうか・・・
NEW 4.5.9 Successful Stair Navigation. A robot is awarded 5 points for navigating up or down a set of stairs in each direction. A successful navigation means the robot moves from the bottom tile to completely on the top tile of the stairs without assistance.
階段の成功:ロボットは、どの方向でも階段を上ったり下りたり移動すると5ポイントを獲得します。ロボットが他の支援なしで下のタイルから階段の上のタイルに完全に移動すれば成功となります。
階段の成功とは・・・どの方向でも良いので、階段を上り始めて、一番上の段にロボットが行ければ5点の得点です。
前半部分に navigating up or down と書かれているの、上って5点、下って5点のように思ったのですが、そうではないそうです。
ということで、階段はたったの5点です。(まあ、実質的にはバンプと同じですから・・・)
4.5.10 Successful Checkpoint Negotiation. A robot is awarded 10 points for each visited checkpoint. Refer to 3.4.4 for definition of visited tile.
ここの Refer to 3.4.4 → 4.4.4 の間違いですね。
4.5.11 Successful Exit Bonus. A robot is awarded 10 points for each victim successfully identified (see 3.5.1).
ここも、see 3.5.1 → 4.5.1 の間違いですね。
NEW 4.6.3 After a lack of progress, the team must reset the robot by using a switch located in a clearly visible location by the referee (see 3.1.6).
競技進行停止からの再スタートの時には、チームは審判がはっきりと見える場所にあるスイッチを使用してロボットをリセットする必要があります(3.1.6を参照)。
競技進行停止後の再スタートの注意点ですね。
さて、皆、これをきちんと理解してくれますでしょうか?
3.1.6のルールと合わせて、競技進行停止で再スタートするときの操作は(解釈にもよりますが)1つのスイッチを操作するだけ、しかできません。
変更点は以上ですね。