








千葉ノード大会用のレスキューアリ-ナを作っています。
まず、ライントレースをするタイルや傾斜路などのコースは、こんな感じ・・・
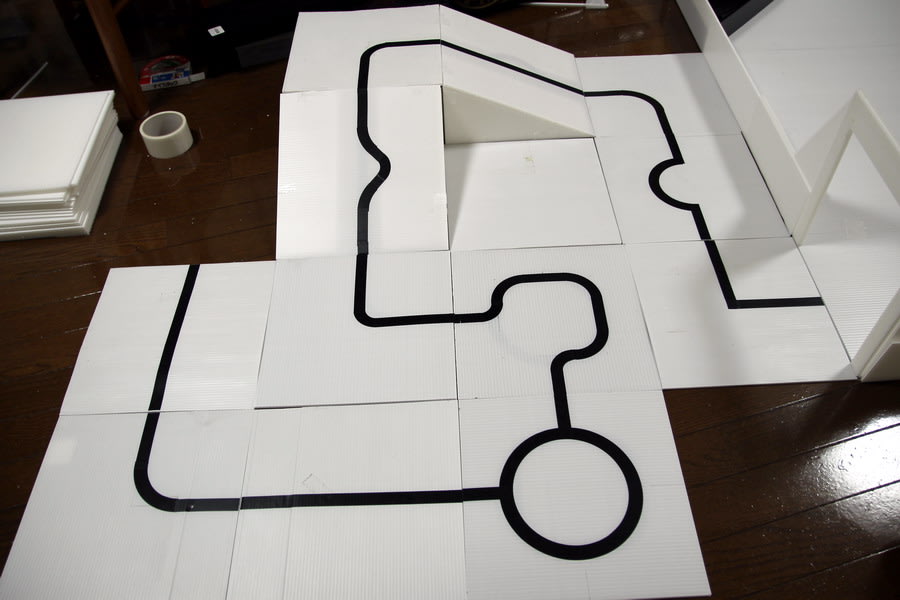
まだ、交差点の緑のマーカーを貼っていません。
そして、避難区域の入口はこんな感じ・・・

まだ、銀のテープを貼っていません。
ルール本文には、避難区域の入口に出入口(ゲート)が有るとは書かれていませんが、最初にあるアリーナの図に描かれているので・・・設置してみました。(ここの部分が結構「弱い」と思うので、壊さないようにお願いしまよ・・・笑)
で、避難区域はこんな感じ・・・

まあ、なんとなく、恰好が付いてますよね。
残念ながら、我が家にはレスキューライン用のロボットが無いので、試走ができません。
(2008年に世界2位になった、RCXのロボットは残っているんだけど・・・)
じゃあ、分解していきます。

傾斜路の部分はこんな感じ・・・
全部分解すると、こんな感じ・・・

避難場所も分解できるけど・・・





